基于拉格朗日算法的起重机摇摆模型构建及其防摇摆模糊控制系统仿真分析
2022-04-05 12:13王海兰任豪豪
武汉科技大学学报 2022年3期
余 震,余 进,王海兰,任豪豪
(1.武汉科技大学冶金装备及其控制教育部重点实验室,湖北 武汉,430081;2.武汉科技大学机械传动与制造工程湖北省重点实验室,湖北 武汉,430081)
桥式起重机作为制造业中的重要起升装备,其运行安全直接影响着人们的生命财产安全。如今桥式起重机朝着自动化、重负载、高效率的方向升级换代,对起重机的起升速度、起升高度及其精准定位、起升过程中防摇摆控制等作业性能提出了更高的要求。
随着控制技术的不断迭代发展,起重机的防摇技术已从手动消摆、机械消摆发展为电气控制式消摆。范波等[1]为了避免能量控制中过度依赖模型、控制算法复杂的问题,通过添加模型参数耦合信号、减少易变动参数,从吊重能量耦合的角度实现定位消摆;Rubagotti等[2]通过设计一个集成的滑模控制器来减少干扰项,解决了影响系统的匹配干扰和不匹配干扰中的一般干扰性问题;朱笑花等[3]基于RNA结构设计出一种RNA布谷鸟搜索算法,将其良好的全局搜索能力用于整定PID控制器参数,摆角抑制效果显著;时宇环[4]提出一种基于谱共轭梯度法的T-S模糊神经网络控制算法用于起重机防摇摆控制,该技术在强搜索条件下,具有充分的下降性和全局收敛性。上述在防摇摆控制算法方面的研究,其实时性还不够好,且抗干扰能力不强。研究人员针对防摇摆控制算法的不足,从控制硬件系统角度开展防摇摆技术研究,夏祯捷等[5]采用开环输入整形技术实现岸桥吊具主动防摇控制,能够使系统残余振荡被抑制后保持在允许的范围内;何祯鑫等[6]设计一种双目视觉结构,用于起重机吊装防斜拉监测与自动对中系统,并将采集的位置信息和角度信号传输到PLC变频控制系统,从而起到防摇控制作用;Schubert等[7]提出了一种模型预测抗摇摆控制器(MPC),采用扩展的卡尔曼滤波器(EKF)以实现位移和摆角信号反馈,通过局部最优信号滚动反馈至全局最优,实现了精准抑制负载摆动。以上研究成果对起重机进行了有效的防摇摆控制,但需要投入的硬件成本比较大,而且硬件系统需要与起重机现有的控制硬件无缝接入,对现有起重机控制系统进行改造所需成本也较大。
为了能对现有桥式起重机控制系统较少改动的情况下,有效实现其防摇摆控制,本文基于拉格朗日方程构建起重机作业时的负载摆动数学模型,根据模糊控制理论设计桥式起重机防摇摆模糊PID控制器,并对所设计的起重机防摇摆模糊控制系统进行仿真,与常规PID控制器防摇摆控制效果进行对比,以期为桥式起重机的防摇摆控制技术的研究提供参考。
1 桥式起重机摇摆模型构建
桥式起重机实物图如图1所示。由图1可以看出,桥式起重机由桥架结构、运行机构、起升机构、电气装置四部分组成。一般情况下,其典型工况为:(1)起吊重物;(2)大、小车水平移动(见图2);(3)重物下降,放置负载。在桥式起重机实际工况中,其大、小车运动对摆角的影响具有独立性和等同效果[8],在构建桥式起重机摇摆模型过程中,为简化模型构建,可将吊重视为一个在二维坐标系内独立摆动的质点。
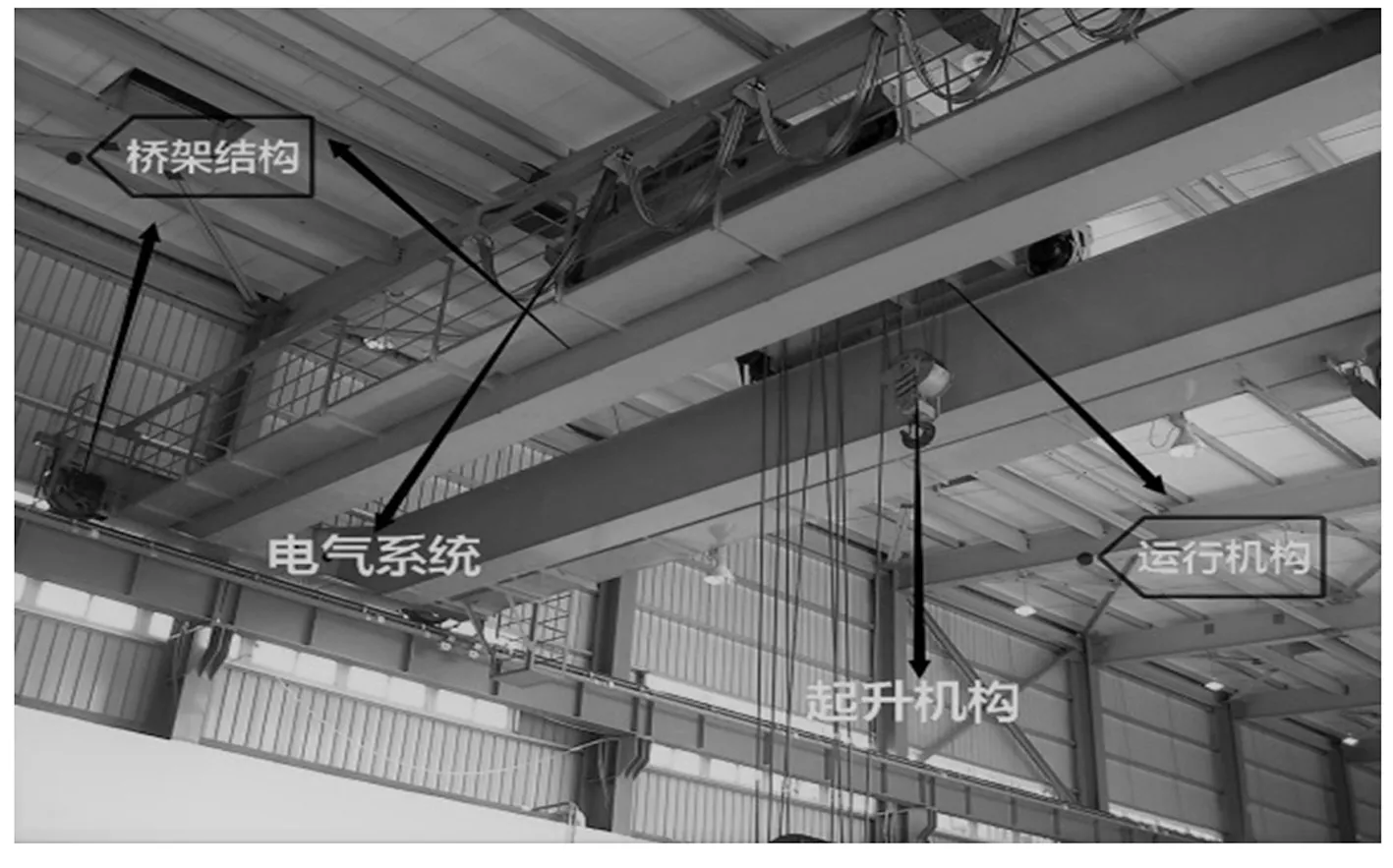
图1 桥式起重机实物图

图2 桥式起重机大、小车水平移动示意图
桥式起重机负载摆动三维图如图3所示。图3中,在三维笛卡尔坐标系内,X轴为起重机小车运行方向,Y轴为起重机大车运行方向,Z轴为负载起升方向,设小车、大车质量分别为mt、mr,负载质量为mp,θx为吊绳在XOZ平面内与X轴的夹角,θy为吊绳与YOZ平面的投影与Z轴的夹角,l为钢丝绳的长度,x、y分别为小车和大车移动位移,其一阶导数、二阶导数分别为大小车的运行速度、加速度,fx与fy分别为小车、大车移动时车轮与轨道的摩擦力。根据投影规则,可以得到负载在空间的坐标位置为:
xp=x+lcosθx
(1)
yp=y+lsinθxsinθy
(2)
zp=-lsinθxcosθy
(3)
由此可得负载在各个方向的速度分别为:
(4)
(5)
(6)

图3 桥式起重机负载摆动三维图
1.1 桥式起重机系统的动能
桥式起重机系统的动能包括大车动能(Tc)、小车动能(Tt)和负载动能(Tp),根据桥式起重机工况,其动能分别为:
(7)
(8)
(9)
1.2 桥式起重机系统的势能
桥式起重机系统的势能包括负载重力势能和大、小车重力势能。选Z=0平面为零势能面,由于大、小车一直在该平面运动,在忽略系统结构变形的情况下,则大、小车的重力势能均为零,根据投影计算可知,起重机负载的高度为lsinθxcosθy,故起重机的总势能为:
U=U起重机+U负载=-mpglsinθxcosθy
(10)
其中,U起重机为起重机重力势能,U负载是负载重力势能,则拉格朗日算子为:
mpglsinθxcosθy
(11)
1.3 桥式起重机系统的拉格朗日微分方程
选取广义坐标qi为[xylθxθy],根据拉格朗日方程推导出起重机在五个广义坐标下的微分方程。
(1)在广义坐标x方向上,其x向的广义力为驱动力和摩擦力,其合力为:
(12)
对式(12)式进行求解得:
(13)
(2)在广义坐标y方向上,其y向的广义力为驱动力和摩擦力,其合力为:

(14)
对式(14)求解可得:
(15)
(3)在广义坐标θy方向上,假设起重机为室内作业,则广义力为0,则其运动方程为:

(16)
(4)在广义坐标θx方向上,同理可得,起重机的运动方程为:
(17)
(5)在广义坐标l方向上,广义力为卷筒起升负载的拉力Fl,忽略钢丝绳弹性变形以及摩擦阻力,则有:
(18)

(19)
(20)
2 桥式起重机防摇摆模糊PID控制器设计
模糊控制理论具备智能控制技术的特点。在冶金行业内,作业环境比较复杂,起重机起升系统存在非线性增强及不确定等因素。因模糊控制算法具备自适应性的特点,其在起重机的防摇摆控制系统设计中具有明显的优势,且PID算法的原理简单,稳定性能好,控制参数相互独立且易选取,其核心问题是参数整定,即通过合理的算法或者手段获取PID控制器的三个最优参数,从而达到反馈调节的作用。
2.1 桥式起重机防摇摆常规PID控制器
桥式起重机防摇摆的PID控制器一般形式为[9]:
(21)
式中,Kp为比例控制参数;Ki为积分控制参数;Kd为微分控制参数。
使用两个PID 控制器分别完成对起重机位移y与吊重摆角θ的控制,积分增益参数的作用是使系统不存在静态误差,假设摆角不存在静态误差,可令摆角PID积分项为0,运用Simulink仿真平台搭建起重机双PID控制器仿真模型如图4所示。

图4 起重机双PID控制器仿真模型
假设摆长固定,设置位移为6 m,仿真时间为30 s,Kp、Ki和Kd参数分别取为10、0.04、22,摆角PID控制器三个参数分别为10、0、23。为了验证PID控制器对干扰的抑制作用,在控制器输出的前向通道将引入的信号噪声模拟为干扰信号[10],通过观察输出曲线是否存在振荡现象,以此来进一步验证设计的PID控制算法是否可以有效使桥式起重机系统对干扰信号的影响具有一定修正能力,白噪声曲线图如图5所示。

图5 白噪声变化曲线
2.2 桥式起重机防摇摆模糊PID控制器设计
模糊PID控制器的设计原则为:选取位移和摆角偏差e以及偏差率ec为输入变量,确定其基本论域,再将量化因子Kec与Ke转化到模糊论域,并将每一个输入输出语言变量取一个模糊集合,确定每个模糊子集的个数,再根据实际工作经验和专业知识库建立一个模糊控制规则表,最后去模糊化后输出ΔKp、ΔKi、ΔKd,通过下面的公式对三个参数进行计算得到PID控制器的参数[11]:
Kp=ΔKp+Kp0
(22)
Ki=ΔKi+Ki0
(23)
Kd=ΔKd+Kd0
(24)
式中,Kp0、Ki0、Kd0分别为Kp、Ki和Kd的初始值,ΔKp、ΔKi、ΔKd分别表示模糊控制器对三个参数的修正值。
根据以往相关操作人员的经验及该领域的研究成果,设置合理的量化比例因子,将其基本论域量化为模糊论域,取值如表1所示。

表1 输入输出变量论域及因子
在用模糊控制理论改进PID算法中,模糊规则决定着控制算法的精准度,输出参数变量ΔKp、ΔKi、ΔKd模糊规则表如表2所示,其中ec、e分别表示偏差率以及偏差,NB、NM、NS、ZO、PS、PB、PM为7个模糊子集,用中文描述为负大、负中、负小、零、正小、正中、正大,其表征的是输入变量对模糊规则的符合程度,例如:如果e为 PB、ec为 NB,则ΔKp、ΔKi、ΔKd分别为 ZO、 ZO、 NS。

表2 PID参数修正量(ΔKp/ΔKi/ΔKd)模糊规则表
由表2的参数模糊规则输出模糊修正量,再采用面积重心法(Centroid)进行去模糊化处理后得到准确值,其去模糊化公式为:
(25)
式中,d代表比例、积分、微分参数p、i、d,假设d=p,那么μpj代表j时刻μ(ΔKp)的值,ΔKpj代表j时刻ΔKp的值,j与49条控制规则对应。积分和微分参数依此类推,把参数ΔKp、ΔKi、ΔKd分别代入式(22)、式(23)和式(24),得到经过模糊处理后的实际PID控制器参数,至此模糊消摆PID控制器设计完成,本文选取位移作为闭环反馈信号,重心法选择以及输入输出模糊控制器编辑器界面如图6所示。

图6 模糊控制器编辑器界面
3 桥式起重机防摇摆模糊控制器仿真
3.1 Simulink仿真模型搭建
模糊PID防摇控制器模型如图7所示。利用Fuzzy logic design工具箱导入事先编辑好的FIS文件,按照图7在Simulink仿真平台上搭建起重机摇摆数学模型。《起重机设计手册》中新钢轨的摩擦系数为0.25,摩擦系数越大则表明起重机车轮与轨道的阻力越大,这样起重机驱动电机需要输出更大的扭矩来抵消阻力部分,影响起重机能耗效率;如果摩擦系数过小,起重机制动距离可能会加大,容易引发安全隐患。但是摩擦系数由粗糙程度决定,经过一段时间的磨合,摩擦系数也会发生改变,因此选取摩擦系数为0.2,设置仿真时间为30 s,为了得到更加光滑的曲线,求解器采用可变步长,设置最大步长为0.1,起重机相关参数如表3所示。
模糊控制器-模糊规则观察器如图8所示。图8中可以显示所设计模糊控制器的输入、输出量的动态关系,移动e或者ec的中心红线,可以观察输出量的变化,从而可以通过图像形象地观察模糊控制器的推理过程。

图7 模糊PID防摇控制器模型

表3 桥式起重机基本参数

图8 模糊控制器-模糊规则观察器
3.2 模糊PID控制器仿真结果
在吊绳长度不变的情况下,将大车位移作为闭环模糊PID控制器的反馈信号,设目标位移为6 m,得到大车位移响应曲线图如图9所示。从图9中可以看出,位移曲线相对平滑,没有出现严重震荡现象,表明模糊控制算法能够有效消除干扰信号的影响,大约4 s时,大车到达目标位置,并且超调量极小,7 s后系统达到稳态并无超调量出现,由此表明,在模糊PID控制器下可以实现起重机大车精准快速定位。

图9 模糊控制器下的大车位移响应曲线
起重机负载摆角输出曲线如图10所示。从图10中可以看出,起重机最大摆角为0.38 rad,根据已有文献显示,如果在没有任何防摇措施下,负载摆角一般在1 rad以上,且会出现摆角持续存在与振荡现象,由此表明,经过模糊理论改进后的桥式起重机防摇摆模糊PID控制器防摇效果较好。

图10 起重机负载摆角输出曲线
3.3 起重机防摇摆模糊PID控制器与常规PID控制器对比
3.3.1 起重机大车移动位移仿真分析
两种控制算法下起重机大车移动位移曲线如图11所示。从图11中可以看出,两种控制系统均没有出现连续震荡的现象,表明两种控制器对干扰信号均有一定的抑制作用;在常规PID控制作用下,能够消除白噪声信号干扰下的大幅度振荡,大车在2.5 s时到达目的地,比模糊PID控制器下的大车到达目标位置时间短,但是由于系统惯性,大约3 s时达到了峰值8 m,超调量较大,而此时模糊PID控制器能够有效降低超调量,且后续没有抖震现象,系统达到稳态的时间更早,由此表明,模糊PID控制器比常规PID控制器定位效果更好。

图11 两种控制算法下起重机位移仿真结果对比
3.3.2 负载摆角仿真分析
两种控制算法下起重机负载摆角曲线如图12所示。从图12中可以看出,当t=1 s时,常规PID控制下的起重机负载摆角达到了第一个峰值0.9 rad,然后摆角的峰值逐渐减小,直至稳定为0;而在模糊PID控制器作用下,起重机负载首次摆角峰值为0.38 rad,并且14 s后负载摆角基本趋于0,比常规PID算法提前了2 s,表明模糊PID控制器能够使起重机负载摇摆得到了快速高效的抑制,同时缩短了摆角达到稳态的时间,由此可得,模糊PID控制器的消摆效果更加显著。

图12 两种控制算法下起重机负载摆角仿真结果对比
4 结论
(1)所设计的桥式起重机防摇摆模糊PID控制器能够快速消除起重机负载摇摆,而且可实现极小超调量下起重机的快速定位。
(2)桥式起重机模糊PID控制器防摇摆控制效果明显优于常规PID控制器,可有效实现桥式起重机在作业过程中的防摇摆控制,确保起重机的作业安全。
猜你喜欢
快乐语文(2020年36期)2021-01-14
中国电气工程学报(2020年12期)2020-10-27
当代陕西(2019年23期)2020-01-06
人大建设(2019年9期)2019-12-27
中国测试(2018年9期)2018-05-14
设计(2017年13期)2017-10-31
企业文明(2016年8期)2016-05-14
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
小火炬·阅读作文(2009年2期)2009-02-17