
无人机三维激光扫描在地表沉降的监测研究
2022-04-06 02:10李彬彬秦海超
北京测绘 2022年3期
李彬彬 王 笑 秦海超
(1. 雄安城市规划设计研究院有限公司,河北 保定071700;2. 建设综合勘察研究设计院有限公司,北京 100007)
0 引言
由于受矿产开发、地下水过度消耗以及其他人为或自然因素变化等多种原因影响,近年来地表沉降甚至塌陷现象频发[1]。据统计,仅2019年,我国就发生地面塌陷事件121起,2020年增加到183起,造成了严重的财产损失,并危险到人民生命安全。由此可见,地表沉降监测已成为当前社会生活中的一项重要任务,且这项任务的工作量在逐年增大,精度要求也越来越高[2]。
当前,可用于地表沉降监测的技术手段有很多,而三维激光扫描是近年来在该领域逐步成熟的一项新技术,其测试精度较高且操作简便。与此同时,随着无人机技术的发展,将无人机作为扫描仪器的搭载平台,能够大幅提升监测的范围和效率[3]。基于无人机的三维激光扫描技术,与传统的机载(有人驾驶飞机)、车载和手持系统相比具有独特的优势:一是其监测范围较大,且飞行路线不受地形限制,可实现对目标区域的全覆盖监测;二是无人机受客观环境因素的影响很小,能够在高危险和高污染区域使用;三是随着无人机技术的不断发展,其应用成本越来越低廉,已经具备大范围普及使用的条件。基于此,本次研究采用无人机三维激光扫描技术对地表沉降情况进行监测,通过扫描得到的数据和资料,对地表不同时期的形态进行三维表面建模,并通过模型配比,提取地面沉降的特征和数据信息[4],从而有效掌握地表变化情况,并为下步针对性治理以及安全措施制定提供可靠的数据支持[5]。
综上而言,基于无人机的三维激光扫描技术,具有测量精确度高、获取数据全面且速度快等优势,这在地表沉降监测工作量越来越大的当前,无疑是提供了一种高效率、低成本、易普及的监测方式,具有一定的工程借鉴意义。
1 基本原理及流程
将无人机作为三维激光扫描的应用平台,有效融合了无人机遥感与三维激光扫描两项技术,其可以对目标区域进行全方位扫描。通过机载三维激光扫描仪的高精度惯性制导系统,可以实时获取无人机的飞行轨迹以及飞行姿态等参数,且在无GPS信号时,该系统可通过激光测距系统实现主动避障,本次研究所使用的无人机及机载设备的主要参数如表1所示。

表1 本次研究所使用的无人机及机载设备主要参数
一般来说,使用无人机三维激光系统进行扫描前,需要先进行实地踏勘,收集目标区域的高程、区域面积等基础资料,并规划飞行路线、飞行高度,根据任务需要设定扫描分辨率。为保证建模质量,应当确保足够的覆盖范围和重叠度,以确保对目标区域进行全方位无死角的覆盖监测。之后通过机载激光扫描系统,以一定的分别率对目标区域进行全面扫描,目前常用的测距方式是脉冲测距法,该方法是通过激光器发射激光脉冲,脉冲遇到障碍物后反射,通过测量时间和发射角度即可计算出目标的位置及距离,以此得到目标点位的三维空间坐标。通过扫描得到的数据和资料,可以获取目标区域的表面密集点的三维坐标数据,即点云数据,从而达到整体测量的目的。总体而言,基于无人机的三维激光扫描方法为非接触测量,可测量面积大,数据采样率和采集精度较高,采集过程为全数字化采集,约束条件较少。基于无人机的三维激光扫描流程如图1所示。
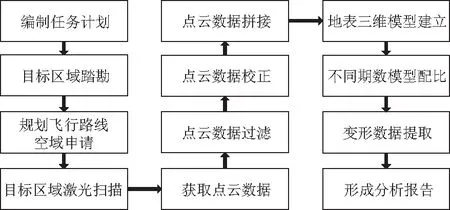
图1 无人机三维激光扫描的基本流程
2 数据处理
采用无人机三维激光扫描技术的主要目的是为了快速且准确地获取目标区域的三维坐标数据,而数据的处理过程将直接影响到后期建模效果以及综合分析的准确性[6],本次研究采用小波神经网络方法对数据进行优化处理。
2.1 点云数据处理
获取点云数据后,需要进行拼接、滤波、抽稀及分割等操作[6]。由于三维模型的构建需要将所有点云数据都被整理到同一坐标系下,因此首先进行点云数据拼接,这需要对每个扫描单元设置标靶,并且要满足相邻两个单元的重叠区域至少有3个以上标靶的条件,这样就可以通过标靶的强制叠合,使相邻扫描单元的点云数据被统一到同一坐标下。在这个过程中,一般需要求解出以下三个参数[7]:尺度参数、平移及旋转参数,通常采用七参数配准以及迭代最近点等算法。之后进行滤波,在三维扫描过程中,难免会出现噪声,这可能导致在建模过程中出现误差[8]。这些噪声一般是由仪器本身误差、测量对象以及天气等其他偶发因素造成的,在建模前进行去噪处理十分必要,对应处理方法如下:对于仪器误差产生的噪声,需要提前调试设备,设置合理的参数,并采取平滑或滤波的方式进行处理;对于测量对象自身因素产生的噪声,一般通过调整扫描距离或调整分辨率方法进行处理;对于天气、动物等其他偶发因素造成的噪声,必须通过人工处理方式进行剔除,可以采用中值滤波、平均滤波或标准高斯法滤波等方法进行处理。最后进行数据抽稀及分割,点云数据的拼接必然会产生数据的重叠和冗余,这会导致后续数据处理工作量增大[9],可以优选保留必要的数据点而剔除多余的数据点,可采用最小预知法、均匀网络法等方法进行冗余数据简化,使得在满足测量精度要求的前提下,尽可能减少数据运算量进而提高建模效率;数据分割的目的是将具有相同属性的数据点划分到同一个区域内,划分的标准是根据几何或拓扑关系的属性而定,将数据进行合理地分割,能够有效提升建模的准确度和效率性。
2.2 小波神经网络方法
小波神经网络的基本原理是使用小波元替代神经元,它可以通过仿射变换,从而使网络系数与小波变换相结合。小波变换提供了一个时间与频率接口,它将信号拆解为一系列小波函数,最后将其叠加。其中ψ(t)是一个基本小波函数,它的傅里叶变换公式为
(1)

之后将任一基本小波函数进行位移变换(设为n),并在不同的尺度h下与需要分析的信号x(t)进行内积,其计算公式为
(2)
式中,h是伸缩因子;τ是时刻值;n是平移因子;x(t)是待分解的信号。
本文研究采用多贝西(Daubechies)小波函数,该函数已被证明在模拟复杂的非线性函数时,其在收敛速度、拟合精度以及容错能力等方面功能强大,这对于地面沉降情况的模拟分析来说,具有很强的适用性。
小波神经网络在复杂非线性函数的模拟方面,已被证明要优于反向传播(back propagation, BP)神经网络,设:输入和输出向量分别为xk和yi;隐含层到输出层的权值和输入层到隐含层的权值分别是wij和wjk;隐含层的伸缩和平移参数分别是pj和qj;输出向量yi的对应输出为dj;隐含层和输出层的神经元个数分别为a、b、N;E为误差函数,其学习过程为
在小波神经网络训练开始之前,随机确定阈值和权值,然后进行误差的计算及逆向反馈,经过反复训练直到满足设定条件为止。
3 地面模型建立及精度分析
3.1 模型建立
实验区域位于辽宁省某市废弃矿场地表,该区域由于多年的矿产开采,地下已探明的采空区多达18处。本次研究,选取了其中沉降位移较为严重的一片区域,区域代号SDT-12,根据以往矿场开发数据,该处地下采空区体积约为12×104m3。研究中采取无人机三维激光扫描与传统架站式三维激光扫描两种方式进行比对,同时为验证模型的有效性,设立了6个水准测量点位与模型数据进行对比。两种监测方法的扫描结果如图2所示。可以看到,对于传统架站式三维激光扫描技术而言,在该区域的东北角及东南角由于地势原因无法有效布设测试设备,因此造成了点云缺失或稀疏。
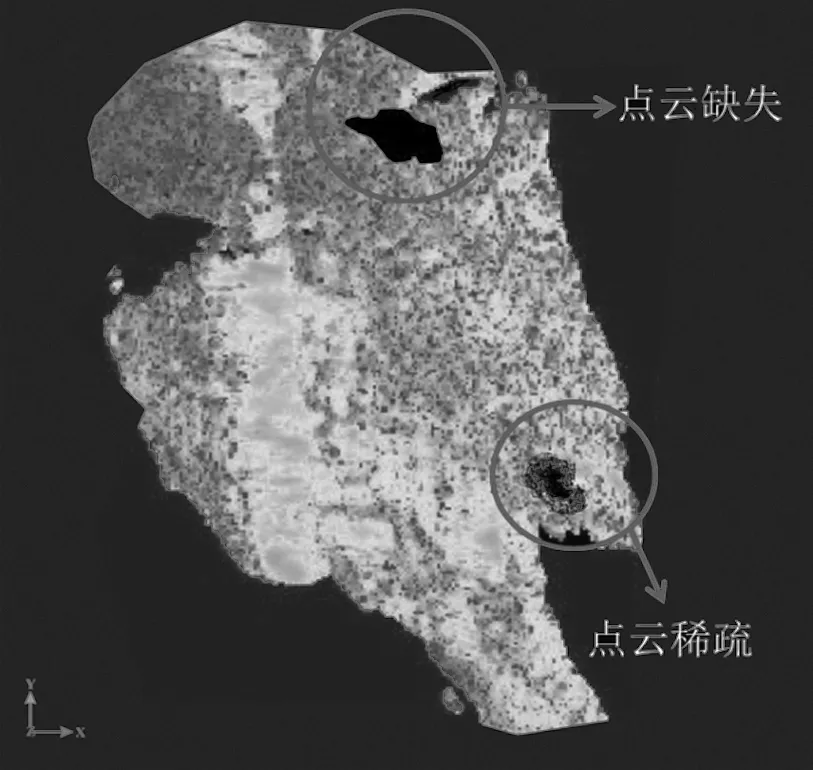
(a)架站式设备获取点云数据
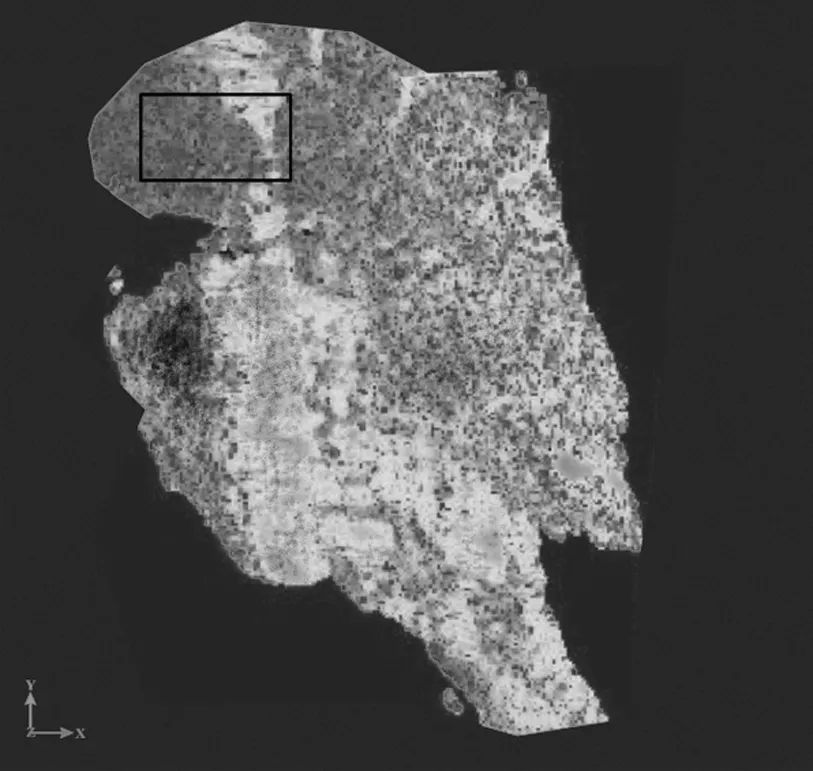
(b)无人机三维激光扫描获取点云数据
本文中,选取该区域西北方向一矩形地域建立三维模型并进行沉降数据提取,即如图2(b)中西北角方框中的区域,模型建立过程中的小波神经网络训练参数设置如表2所示。

表2 小波神经网络训练参数设置
分别建立Ⅰ期模型(数据于2020年9月获取)和Ⅱ期模型(数据于2021年8月获取),如图3所示。为便于对比,图中z坐标是海拔高度,x坐标和y坐标是以截取的矩形形状的一角为原点构建。可以看出,三维表面模型较为直观地反映地表的基本形态,同时可以直接对模型中的点位进行三维坐标提取。
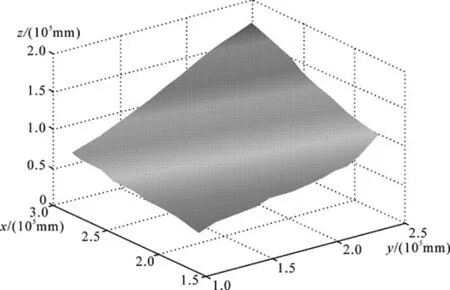
(a)Ⅰ期模型

(b)Ⅱ期模型
3.2 沉降情况分析
将Ⅰ期和Ⅱ期模型放入同一个坐标系中,可对两期地表形态进行对比,并计算出两期数据的高程的差值,即得出沉降值Δh,从而能够直观地对变形情况进行观察及分析。两期地表形态的沉降模型如图4所示。

图4 地表下沉情况模型图
通过对比及数据提取,可以发现该区域的沉降趋势明显,沉降位置主要位于该区域的东北角,最大沉降量达到1 372 mm;而该区域东南角略有抬升,最大上升位移161 mm。通过计算得出,该区域平均沉降量为673 mm。按照地质灾害灾变等级划分[10],该处地表沉降规模属于中型沉降,危险性方面属于中等危险型。
3.3 精度分析
对于小波神经网络点云数据曲面拟合的精度,通过对两期模型的60个测试点位的模拟值和真实值进行对比计算,均方根误差控制在5.37~6.14 mm的较低区间,最大相对误差均小于0.02%,具体情况如表3所示。为验证建模精度,此次实验还设置了6个水准对比点,均为Ⅲ级临时性水准点,且这6个点全部为不参与建模的精度对比点,受地形限制基本按照2×3的模式进行布点,其中4个点位于交叉道(路)口,2个点位于临时建筑物旁侧。将提取的点云高程数据与6个水准测量数据进行对比,两期监测数据与水准数据的误差控制在7 mm以内,如表4所示。可以看出,该方法较为准确地反映了地表的变化情况,监测模型是可靠的。
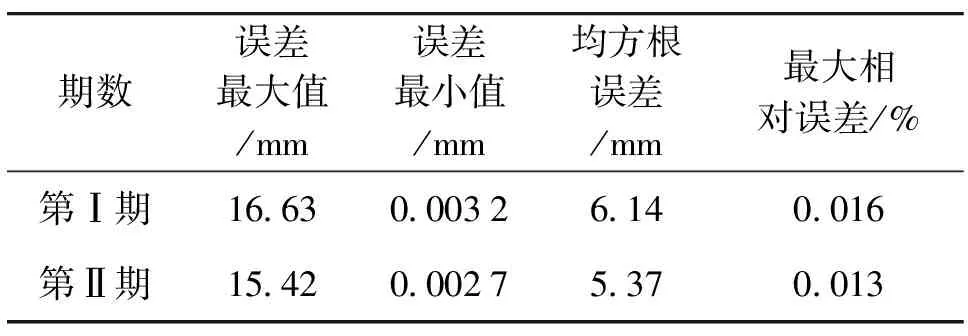
表3 曲面拟合精度

表4 点云测试数据与水准测量数据对比 单位:mm
4 结束语
基于无人机的三维激光扫描技术,能够对目标区域进行全面、高效且精确的扫描,与传统监测方式相比较,其监测速度更快、获取的数据也更完整;再者,对于存在地表沉降情况的危险区域而言,该技术无须测试人员进入危险区域布设设备,在安全性上也要优于传统监测手段。总的来说,该方法测量误差控制在合理范围以内,具有较强的实用性和可靠性,提供了一种精确且有效的监测手段,对于高效便捷地开展地表沉降监测工作具有一定的现实意义。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
舰船科学技术(2022年11期)2022-07-15
中国教育信息化·高教职教(2022年4期)2022-05-13
现代仪器与医疗(2022年1期)2022-04-19
煤气与热力(2022年2期)2022-03-09
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
软件(2017年6期)2017-09-23
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
儿童故事画报·智力大王(2016年3期)2016-05-05
