智能重载机器人的设计与应用
2022-04-06 10:08郭超,武超
实验室研究与探索 2022年2期
郭 超, 武 超
(洛阳理工学院电气工程与自动化学院,河南洛阳 471023)
0 引 言
随着工业化的不断发展,越来越多的行业使用工业机器人代替人工作业,如电气、煤矿、汽车和交通运输、化工塑料等。工业机器人根据其负载能力分为轻载和重载两种,区分界限为100 kg。目前国内重载工业机器人因负载能力、功能化、专用性等问题,尚处于开发的初级阶段,与国际领先水平仍存在差距[1]。Fang等[2]设计并制作了机器人和运动控制器,采用简单的控制算法,提高了重载机器人的控制性能。Lee等[3]提出了一种基于视觉的高精度手眼自标定方法,应用于工业机器人,该方法使用设计棋盘的已知精确位置来计算机器人末端执行器和相机之间的关系,提高了手眼校准精度,且在标定过程中无需操作员干预即可高精度地执行手眼校准。Ninomiya等[4]提出了一种基于实时模拟器的三维传感器自动标定方法,通过获取实时关联虚拟传感器和真实传感器的刚体坐标变换,估算真实传感器的相对位姿。
随着我国煤炭需求的剧增,国家对煤矿产业安全治理的要求越来越高,煤矿智能化建设也愈发重要。开发应用型煤矿机器人,逐步达到智能化无人生产,是实现煤矿产业安全生产的必由之路。近年来,随着科技的不断发展,重载工业机器人研制方面有了显著成效,但这些重载机器人大多只能定点作业,且受环境因素的影响较大,尤其是应用于巷道的智能化重载机器人,其研制进展缓慢,智能化水平不高[5]。同时,在工业生产中,经常无法避免危险区域的重载作业,如煤矿产业中的巷道建设以及交通运输行业中的隧道建设等,因其环境的特殊性,开凿、挖掘、运输、修复、装载等重载作业常常难以实施,且安全性难以得到保障。本文开发了一款智能化巷道重载机器人,该机器人除了具备挖、修、装等基本智能化功能外,还具备高响应、高灵敏、快速救援等特点,为安全化生产提供了有力保障。
1 巷道重载机器人结构改进
1.1 机器人研究模型
选取煤矿巷道修复机为本研究的模型,煤矿巷道修复机主要用于巷道顶板、侧边以及底板的治理和修复,并且在巷道和隧道中具有破碎、扒渣、运输、装载等功能。图1为WPZ-37/600型巷道修复机,具备全角度旋转式工作臂,能满足各方向的工作要求。此外,其机身整体结构较小,工作能耗小,具备在狭小、封闭等特殊恶劣条件下作业的优势。煤矿巷道修复机的广泛应用,不仅大大降低了工人的作业时间,也提高了煤矿产业的工作安全性,是推动煤矿产业高质量发展的有力保障[6]。

图1 WPZ-37/600型巷道修复机
巷道修复机的主要组成包括挖斗、破碎锤、吊钩、万向机械臂、电动机油泵站、履带行走机构及相关操作机构等。其工作原理为:①驱动方式:全液压动力驱动;②作业方式:通过万向机械臂实现巷道的多功能修复;③吊装运输作业实现方式:在机械臂上安装起吊钩实现吊装运输作业;④巷道平整作业实现方式:在履带前方安装推土铲实现巷道平整作业[7]。
1.2 实体结构改进
巷道修复机解决了复杂环境下煤矿巷道维护、修整的难题。但随着时间的推移,其弊端也日益暴露,如自动化程度不高、智能化水平不足、作业精准度不高、人工化操控机制无法保障操作工人的安全等。因此,设计开发一款智能化、能够遥控作业的巷道重载机器人具有深远的现实意义。此外,因为巷道封闭且狭小、环境复杂,所以巷道重载机器人的尺寸必须尽可能的小,以满足其行走、修复等作业的灵活性要求。而且巷道中的危险环境通常无法预知,因此设计的巷道重载机器人也必须同时具备实时获取、感知四周环境,及时处理分析所获取数据的能力,并达到精准作业的要求。
本文以目前已发展成熟的巷道修复机为原型,对其结构进行改进,满足巷道重载机器人结构要求,其改进思路如下。
1.2.1 巷道重载机器人结构设计
巷道修复机改进设计方案如下:
(1)优化运动轨迹和结构参数。参照运动轨迹及结构参数优化方法[8],对以巷道修复机为原型的巷道重载机器人的运动轨迹及结构参数进行优化。
(2)优化作业臂的结构形式。巷道修复机作业臂的结构形式一般以串联形式为主,该形式下作业臂具备较大的作业空间,但因为各结构间均以串联方式相连,故在机器人复杂结构中,每一结构的细微缺陷都将一一累加,如制造、装配、传动等误差导致的缺陷,部件磨损导致的缺陷,以及各部件本身的柔性、稳定性、控制性等缺陷,经过累加放大后的缺陷必将对巷道修复机整体性能产生影响。为增强机器人的控制,提高执行精度,可执行的研究思路一方面是开发新型可升缩作业臂的结构形式;另一方面是增强串联模式下机器人辨识度优化及控制技术。为解决刚性问题,提高作业臂的强度和刚度,考虑采用不同形状、厚度的钢材进行焊接[9]。
(3)精简冗余部件。将巷道修复机原型的两套液压装置进行整合。此外,还考虑重新优化/设计关键机械部件,使用轻便、负载能力较高的作业臂结构。
1.2.2 巷道重载机器人控制系统模块重构
巷道重载机器人控制系统的设计仍以巷道修复机的控制系统为原型。若将巷道修复机的控制部分和执行部分串联执行,其累积缺陷不利于机器人的稳定性和控制性,故考虑将两部分并联执行,减少缺陷的累积效应,以提高重载机器人的整体性能,实现重载机器人在恶劣、狭小、封闭环境中快速、高效完成重载作业任务的要求。
根据重构前后的控制系统对比图(见图2)可知:①重构前的巷道修复机控制部分需要人工操控,重构后的重载机器人增加了远程遥控方式,总站接收到遥控器发送的信号后传递给执行模块,进行相关操作。②重构后的重载机器人增加了传感模块,该模块使得机器人能实时感应自身系统的物理变量,并作出相应的调整,如温度传感器能实时感应温度的变化,当机器温度超出预警范围时,将发出警报,提升了机器使用的安全性;压力传感器可以实时监测到油压信号的变化,提高液压驱动式重载机器人作业的稳定性。③重构后的重载机器人增加了监控和通信模块,这两个模块与传感模块并联执行,监控和通信模块的增加有利于实时掌握机器人的作业方位、提高位姿精确感知能力,以进行精准作业。且并联方式使得各模块间互不影响,满足不同作业需求[10]。
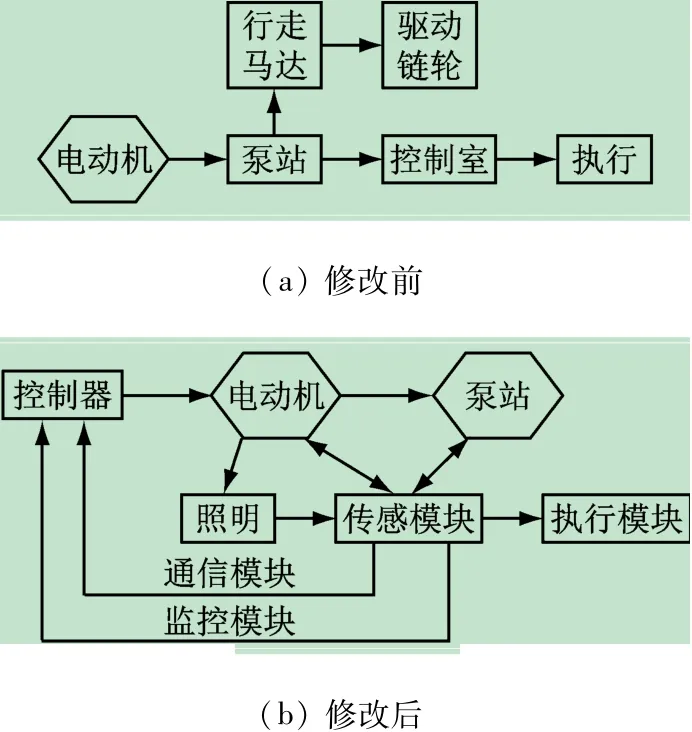
图2 结构修改前、后的巷道修复机控制系统图
2 巷道机器人的智能化重构
2.1 驱动方式的选择
机器人的驱动方式主要有液压、气压、电动机、机械4种。其中,因气压驱动稳定性差、效率低;机械驱动仅适用于简单结构的工业机器人,故这两种驱动方式均不考虑。液压驱动式机器人的负载能力高、稳定性好,但因压力能是主要的能量转换方式,故该驱动方式对密封性要求较高,对环境温度的变化较为敏感,而且液体在过大压力下极易发生泄露,造成环境污染。电机驱动方式,控制灵活度更高,响应更快,且成本低、效率高,得到了越来越广泛的应用。但电动机驱动方式在恶劣条件下不便于充电,且负载能力不高。
本研究对液压驱动与电动机驱动两类方式进行合并,电动机驱动方式主要用于重载机器人的一些简单的、负载小的作业;液压驱动方式能承受更大的负载,故主要用于重载机器人挖、举、吊等动力能需求较大的作业。
2.2 监控模块的设计
监控系统中控制器的设计是关键,控制器会对重载机器人的稳定性、控制性及作业的准确性产生直接影响。因多轴控制器设备的通信效率、信息的时效性与及时性较高,故选其作为重载机器人监控系统的控制器。此外,在监控模块可视化环境的设计中,为使监控人员可以直观地看到机器人各部件的操作过程以及巷道内的周围环境,本文借助三维模型的搭建,设置虚拟化、可视化模型的关键属性参数,得到相应的实际运行效果。
本文设计的重载工业机器人,监控模块主要对驱动器的两个模块进行监控,电动机的监控可实时观察电压的稳定状况,液压的监控可实时了解压力大小,电动机和液压的监控可避免漏电、漏液等异常情况的发生,提高整体的可靠性及安全性。
2.3 传感模块的设计
通过对传感模块的设计实现对工业机器人本身设备状况及四周环境的检测,及时、准确地了解机器人作业的具体情况。机器人同样可以通过传感系统获取位置、环境等信息,并通过获取信息快速准确地作出判断和规划。
(1)搭建视觉传感器。通过CCD传感器实现视觉传感器的搭建,对机器人本身而言,可增强其对周围环境的判断力,以作出相应反应,如障碍物处理、路线规划等。对观察、操作者而言,有助于实现远程状态遥控、精准作业定位等功能[11]。
(2)搭建光敏传感器。光敏传感器的搭建使得重载机器人能够感知光线的明暗变化,进而实现对光度的自动调节,尤其适用于光线较弱的封闭巷道环境。
(3)多传感器的结合。因单一的传感器对信息的接收及数据的处理存在一定的局限性,无法全面地感知机器人整体的状况以及巷道内环境,故考虑将以上传感器进行融合搭建,实现光线与视觉的双重效果,提升形成图像的质量。
2.4 控制模块的设计
控制模块包含了控制器、液压泵和电动机。本文设计的智能巷道重载机器人可通过传感系统对执行模式进行自我判断从而作出选择,如在行走模式下启动电动机驱动,在多功能作业模式下启动液压驱动等。
此外,为实现巷道重载机器人对作业轨迹的规划,在控制系统中增加了作业目标识别数据库,结合高精度的控制算法,使机器人能在巷道中实时获取其位置、姿态等信息,时刻感知周围突发状况,以提高机器人作业的精度。控制模块、传感模块与监控模块的结合有助于实现机器人自我的智能控制能力。各模块间的控制系统如图3所示。
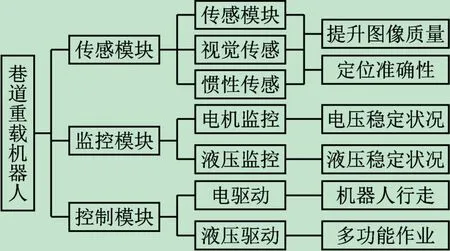
图3 巷道重载机器人的模块控制图
3 数字矿山类智能巷道重载机器人构建
为满足数字矿山类智能巷道重载机器人的构建要求,本文采用数字孪生技术,即利用物理模型,通过计算机仿真过程,在虚拟空间完成物理实体的空间映射,从而研制出高智能化的巷道重载机器人[12]。
3.1 机器人视觉系统的设计
机器人位姿信息的判读准确性主要取决于机器人的视觉系统,早期机器人的视觉系统仅能从视觉信息中提取反馈信号,视觉定位精度较差。本研究采用的视觉伺服控制技术能够较好的解决定位差的问题,进而提升了机器人的视觉定位精度。为了更精确地提供机器人的姿态、加速度等信息,本文还搭建了拥有自主式导航系统的捷联惯性导航系统。视觉伺服技术与捷联惯性导航系统的结合,实现了精准定位、自主式导航等智能化巷道重载机器人所具备的功能。
3.2 机器人数据交互模块的设计
机器人数据交互实时性与精准性的实现,不仅取决于机器人视觉系统对信息的采集,还要依靠数字化系统对收集的数据进行快速分析计算,并对下一步的执行作业进行准确判断与决策,控制机器人各作业臂的协同工作,并以最佳位姿状态进行各项重载作业。机器人对数据的收集反映在数字化系统上,数字化系统通过对相关数据的处理与分析,以及对机器人的作业进行决策与控制,实现了数据交互的实时性与精准性。
3.3 虚拟现实技术的应用
巷道环境复杂,突发危险状况较多,发生事故的风险概率较高,为增强机器人在各种状况下的及时应变能力,降低风险发生概率。本文采用虚拟现实技术,通过4D可视化模型的建设,真实再现巷道环境下机器人作业的实际情况,通过虚拟操作对机器人的巷道作业、事故状况进行模拟,以减少作业过程中的不确定性,降低事故发生率[13]。Ma等[14]提出了一种基于全景虚拟现实技术的结构可视化方法,将全景球面图像与结构健康监测系统获取的隧道实时监测数据相结合,不仅实现了全景虚拟现实环境下的数据传输和信息访问的及时性,并且能动态展现机器人在巷道的作业过程。
3.4 智慧矿山体系建设
机器人通过自身的多传感系统,可获得大量的数据信息,需要借助云计算技术对收集到的大量数据进行有效地存储分析[15]。此外,涵盖大数据采集、预处理、存储、分析于一体的大数据技术的发展同样助力了智能巷道机器人的实现。智慧矿山体系所要求的智慧分析、决策和行为,不仅需要云计算技术与大数据技术的支持,还需要各模块间的协同作用。数字孪生系统可实现各模块间的互联和互操作性,不同模块间通过实时、动态、协同的控制以实现物理实体与数字间的协调统一。云计算、大数据、虚拟现实等技术有效融合,为数字矿山类智能巷道重载机器人的建设提供了有效的技术保障,对实现智能、高效、安全的巷道内作业具有深远意义。
4 应 用
本文设计的数字矿山类智能巷道重载机器人已在煤矿产业应用,在实际应用过程中收集了巷道修复机和智能巷道重载机器人连续7 d(每天工作8 h计)累计修复的巷道面积,作为工作量的衡量指标。将采用人工作业的巷道修复机与采用遥控智能作业的巷道重载机器人的工作效率进行对比,对比结果如图4所示。由图4可知,本文开发的智能巷道重载机器人大大提升了煤矿产业的工作效率,其工作效率约为人工作业巷道修复机的10倍左右。

图4 巷道修复机和重载机器人工作效率对比图
5 结 语
本文通过煤矿巷道修复机结构的改进,采用油/电两用新型高效混合动力驱动控制系统,通过控制模块、传感模块与监控模块等模块间的协同控制,将云计算、大数据、虚拟现实等技术有效融合,构建了完整数字矿山类智能巷道重载机器人开发体系。研究成果将进一步推动煤矿行业向智能化、无人化、智慧化发展。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
商品与质量(2021年43期)2022-01-18
房地产导刊(2020年11期)2020-12-28
矿产勘查(2020年9期)2020-12-25
铁道通信信号(2019年4期)2019-10-10
建材发展导向(2019年5期)2019-09-09
制造技术与机床(2019年7期)2019-07-22
活力(2019年21期)2019-04-01
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07