含转子位置信息的永磁超环面电机终端滑模控制
2022-04-08 05:56王晓远
空军工程大学学报 2022年1期
刘 欣,栗 迪, 王晓远
(1. 天津工业大学天津市现代机电设备技术重点实验室,天津,300387; 2.天津大学电气自动化与信息工程学院,天津,300072)
永磁电机以其功率密度大、转矩电流比大和动态响应快等优点,被广泛应用于工业领域[1-4]。永磁超环面电机是将永磁电机、行星蜗杆电磁驱动和控制技术有机结合的新型空间电机,它具有结构紧凑和功能集成等特点[5-7]。永磁超环面电机适应了机电驱动集成设计的发展方向,不仅可用于航空航天、军事和车辆等要求结构紧凑的领域,还可用于机器人控制和飞行器制导等控制要求高的技术领域[8-9]。
当前国内外对永磁超环面电机的研究主要集中在电磁结构优化,仅靠改变结构参数来改善输出性能是有限的,对该电机控制策略的研究是实现其高性能输出的关键。为了获得较好的输出性能,设计高性能控制算法就显得尤为重要。文献[10]中的切换函数用饱和函数代替传统的符号函数,削弱了滑模控制器所引起的抖振,但瞬态响应并未提高。文献[11]在设计滑模面时选择了积分滑模面,提高了系统的稳态精度,但滑模面失去了降阶特性。文献[12]设计了终端滑模控制器,有效降低了由系统不确定上界引起的抖振现象,该控制器具有良好的跟踪性能,对参数变化不敏感且鲁棒性好。终端滑模控制器在传统滑模的基础上引入了非线性项,改善了系统的收敛特性,具有动态响应速度快、有限时间收敛等优点[13-16]。文献[17]设计了基于二阶终端滑模优化的电流滑模控制器,提高了电流稳态精度,获得了更好的调速性能且具有良好的鲁棒性。文献[18]提出了自适应非奇异快速终端滑模控制方法,该方法在保证快速收敛和跟踪精度情况下,明显削弱了抖振,具有较强的鲁棒性。文献[19]提出一种基于鲁棒微分估计器的新型终端滑模控制方法,该方法优化了系统的响应速度、无超调量和鲁棒性等性能。
本文由超环面电机特殊的空间结构和工作原理,分析该电机的电磁参数,推导含有时变参数的超环面电机数学模型。利用状态空间法分析超环面电机在输出性能上的周期波动特性。设计基于行星轮转子位置的终端滑模控制器,引入因行星轮自转引起的参数摄动项,将闭环反馈得到的转子位置信息补偿到控制器中,以削弱时变参数带来的影响。最后搭建基于终端滑模的矢量控制仿真模型,通过与PI控制对比分析,结果表明该控制策略确实可以提高超环面电机的输出性能。
1 超环面电机结构原理
1.1 基本结构
永磁超环面电机的蜗杆内定子上有一个外环面,环面外定子上有一个内环面,所以称为超环面。永磁超环面电机的基本结构如图1所示,它主要由蜗杆内定子1、行星轮2、环面外定子3和行星架转子4组成。
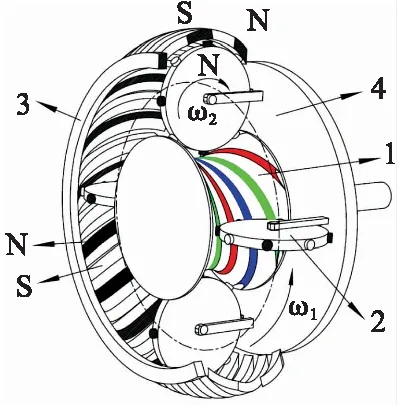
图1 超环面电机结构
蜗杆内定子外环面上均匀分布螺旋状凹槽,槽内安放有电枢绕组以形成螺旋旋转磁场,与行星轮上永磁齿进行电磁啮合;环面外定子是由若干个NS极相间的螺旋永磁梁组成。行星轮在内定子旋转磁场和环面外定子固定磁场的共同作用下公转和自转,行星轮的公转驱动行星架转子转动,实现动力的输出。
根据永磁超环面电机的工作原理,采用机构转化法分析其行星蜗杆传动关系,得到行星轮自转和外定子间的转速比:
(1)
式中:ω2为行星轮自转角速度;z2为行星轮永磁齿齿数,ω1为行星轮公转角速度,即行星架的角速度;z3为环面外定子齿数。由式(1)可得,行星轮自转机械角度θm2和公转机械角度θm1之比:
(2)
电角度和机械角度的关系满足θe=pnθm,pn为极对数。行星轮公转方向极对数p=k/2,k为行星轮个数;自转方向的极对数p2=z2/2。结合式(2)可得行星轮自转电角度θ2和公转电角度θ1之比:
(3)
1.2 电磁参数
永磁超环面电机运行时行星轮自转会使永磁齿和蜗杆内定子之间的气隙发生周期性变化,为了分析蜗杆内定子螺旋电流产生磁链以及电感参数,以蜗杆内定子A相绕组的电流i为例,将该电流分解为沿蜗杆内定子轴向截面切线方向的电流分量i1;沿蜗杆内定子周向截面切线方向的电流分量i2,如图2所示。
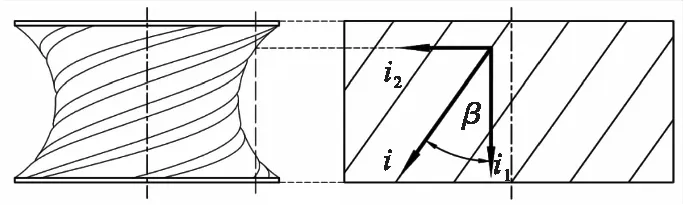
图2 电磁啮合处电流分解
LAA=Ls0(k1+k2)-Ls2(k1cos 2θ1+k2cos 2mθ1)
(4)
式中:k1=cosλ,k2=sinλ,λ为蜗杆内定子绕组螺旋角;Ls0和Ls2分别为A相自感平均值和二次谐波幅值。
由行星蜗杆传动原理,可知蜗杆内定子绕组螺旋角满足:
(5)
式中:α为任意电磁啮合处行星轮永磁齿中心线和内定子喉部截面夹角;a为行星轮与蜗杆内定子中心距;R为行星轮半径。A相绕组自感如图3所示。
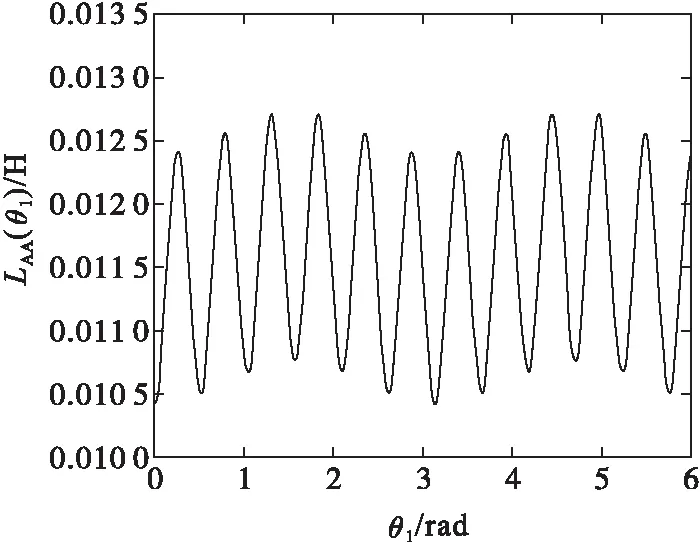
图3 绕组自感
由图3可以看出,蜗杆内定子绕组的自感以余弦规律周期性变化,自感的振幅和周期是由行星轮的公转所决定,而每个周期内有m个波动,每个波动周期对应行星轮的自转周期,波动振幅是由行星轮的自转所决定的。
永磁超环面电机运行时行星轮的自转会引起气隙磁阻的变化,为了分析行星轮永磁齿和三相绕组之间的磁链,采用等效励磁绕组的方法。在公转方向上将包角范围内的所有磁齿等效为电流If1的励磁绕组产生的磁动势Ff1;在自转方向上将一个磁齿等效为电流If2的励磁绕组产生的磁动势Ff2,如图4所示。
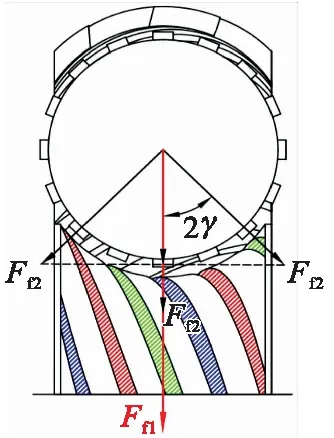
图4 行星轮磁齿磁动势
由图4在包角范围内的行星轮的永磁齿的磁动势关系,可以得到公转方向和自转方向的磁动势的关系满足:
(6)
式中:G=0.5(zν-1),zν为包角范围内的行星轮磁齿的个数;γ为相邻永磁齿的夹角。为了综合考虑行星轮公转和自转对永磁齿与绕组之间磁链的影响,现定义公转和自转方向的等效励磁绕组的影响系数η,且0<η<1。
(7)
取公转方向和自转方向的等效励磁绕组的匝数相同,根据磁路的欧姆定律F=NI,可以得到If2=ηIf1。根据互感的定义,忽略漏磁的影响,结合电磁学原理可以得到行星轮永磁齿与蜗杆内定子A相绕组之间的互感磁链ψAf:
ψAf=ψf(cosθ1+ηcosmθ1)
(8)
式中:ψf为行星轮永磁齿和蜗杆内定子绕组的磁链幅值,永磁齿和A相绕组间互感磁链如图5所示。

图5 永磁齿磁链
由图5中可以看出永磁齿和内定子绕组之间的互感磁链以余弦规律变化,磁链周期和幅值是由行星轮的公转所决定。而每个周期内的波动是由行星轮的自转所决定,波动的幅值是行星轮的永磁齿齿数决定,当行星轮齿数增加,行星轮自转对互感磁链的影响减小,磁链波形中小波动的振幅也随之减小。由式(8)看出当包角范围内行星轮的齿数增加时,系数η则会减小,而磁链波形中波动的振幅也会减小。
2 超环面电机动态特性分析
考虑到电压方程中由蜗杆内定子和行星架转子引起的时变系数,将坐标系变换到与行星架转子相对静止的旋转坐标系。由于行星轮的坐标系固定在行星轮上,在坐标变换时无法消除行星轮自转时引起的时变参数。因此永磁超环面电机的电压方程仍是含有时变系数的微分方程,且时变系数m1θ1由行星轮的自转所决定的。
通过坐标变换,且不计涡流磁滞损耗以及铁心磁饱和,可以推导出在同步旋转坐标系下,永磁超环面电机的多变量时变非线性数学模型:
(9)
式中:m1=m-1;Te为输出电磁转矩;TL为负载转矩;B为阻尼系数;J为行星轮和行星架转子的转动惯量;ωm1为电机输出转速;uq和ud分别为蜗杆内定子交轴和直轴电压;iq和id分别为蜗杆内定子交轴和直轴电流;Rq(θ1)、Rd(θ1)分别为交轴和直轴等效电阻项;ψfq(θ1)、ψfd(θ1)分别为永磁齿和绕组之间的互感磁链的交轴和直轴分量。等效电阻项和互感磁链分量如下:
(10)
式中:L3=1.5Ls2k2;Ld、Lq分别为蜗杆内定子在同步旋转坐标系下直轴和交轴的电感分量。
(11)
式中:L1=(k1+k2)(Ls0+Ms0);L2=1.5Ls2k1;Ms0为互感的平均值的绝对值。为了分析启动和稳态阶段输出性能的变化,使用状态空间分析法,分析电机的动态特性,得超环面电机的状态方程:
(12)
根据式(12),对状态方程进行动态求解,以三相交流供电时的负载启动过程为例。电机参数设置为:ψf=0.175 Wb,R=3 Ω,z3=38,k=8,Ls0=0.01 H,Ls0=0.001 H,TL=5 N·m,J=0.001 kg/m2。动态求解结果如图6所示。
由图6可以看出永磁超环面电机在负载启动时,输出转速和电磁转矩都有较大超调量,在过渡阶段,转速和转矩均存在较大的波动,达到稳态的调整时间为0.2 s。稳态阶段时,输出转速存在5%的周期波动,电磁转矩存在80%的周期波动。永磁超环面电机在稳态阶段时输出性能上存在的周期波动,是由行星轮的自转产生的时变参数引起的。通过将图6中转速和转矩在稳态阶段的波动周期与图3中绕组电感参数波动的周期对比发现,两个波动周期是一致的,因此输出性能的周期波动确实由行星轮的自转引起的。
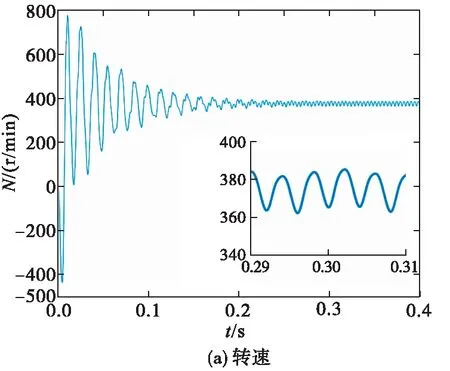
图6 负载启动时的动态分析
3 超环面电机终端滑模控制
3.1 矢量控制
目前在矢量控制中,PI控制是现在较为成熟的控制方法。PI控制器具有算法简单、可靠性高的优点,本文采用基于id=0的转子磁场定向控制策略,其转速环和电流环均采用PI控制器[20]。
(13)
将式(13)的极点配置到期望的闭环带宽tβ。通过拉氏变换可以得到转速环相对于q轴电流的传递函数为:
(14)
由式(13)、(14)可以得到永磁超环面电机的有功阻尼系数:
(15)
采用传统PI控制器,则转速环控制器表达式:
(16)

(17)
采用有功阻尼的概念设计PI控制器参数,确保了控制系统的稳定性,并且参数调整与系统的动态品质关系明确。经过参数整定后,将行星轮转子的位置信息补偿到PI控制器中,可以削弱由于行星轮自转引起的时变参数带来的内部干扰。
3.2 时变终端滑模控制
由于行星轮自转引起的参数摄动,使电机输出性能存在较大的周期波动,为了提高超环面电机的输出性能,现设计基于行星轮转子位置的终端滑模控制器来削弱参数摄动的影响。由式(9)可得超环面电机的数学模型:
(18)
取永磁超环面电机的状态变量:
(19)

(20)

为了保证系统状态可以根据滑模运动最终滑动到原点。建立永磁超环面电机的滑模面函数时,选取终端滑模面函数:
(21)
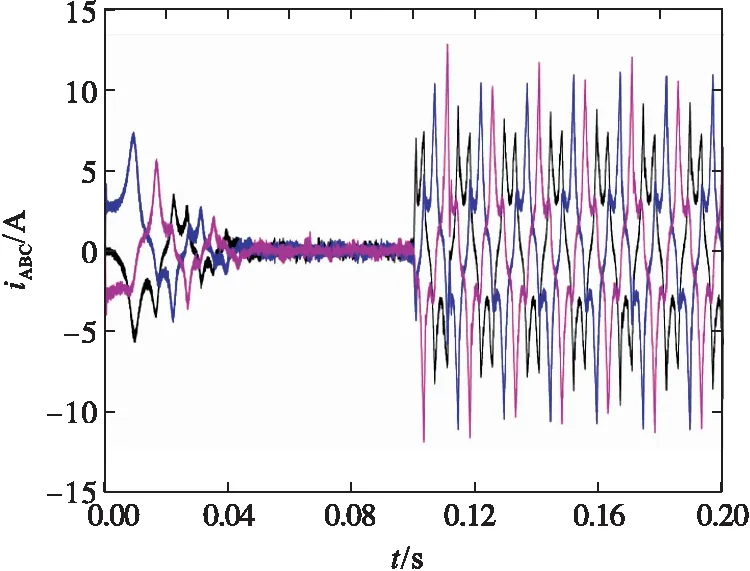
式中:x∈R,β>0,且q1 (22) 当系统状态达到滑模面后,状态变量做滑模运动逐渐趋近到原点。由式(22)可得通过调整滑模面参数β大小可以控制x1趋于原点的速度,β越大趋近速度越快。对滑模面函数求导得到: (23) 为了保证永磁超环面电机的控制系统具有较好的动态品质,采用指数趋近律: (24) 式中:ε>0;q>0。 当系统状态远离滑模面时,s较大,指数趋近率中qs起决定作用,可以调整q的大小来调整趋近运动的速度;当系统状态运动到滑模面附近时s较小,在滑模面上趋近原点时由等速项εsgn(s)起主要作用,选择合适的ε可以减小系统抖振。结合式(23)和式(24),可以得到交轴的参考电流: (25) 利用Lyapunov稳定定律验证时变终端滑模控制器的稳定性和存在性。设计的时变终端滑模面存在,且系统能够在有限时间内收敛到给定轨迹。 所设计的基于行星轮转子位置的终端滑模控制器,将行星轮自转产生的参数摄动补偿到终端滑模控制器中。通过这种参数补偿可以根据时变的数学模型,实时对控制器函数做出相应调整,以此削弱电机参数摄动带来的影响,提高了系统的抗内部干扰的能力。 为了验证经过参数整定的PI控制器和基于行星轮转子位置的终端滑模控制器的有效性,以及终端滑模控制器对削弱输出波动的能力,对所设计的控制系统进行仿真建模如图7所示。 图7 时变终端滑模控制系统 对PI控制器和SMC控制器建模仿真时,超环面电机参数设置如表1所示。 由图7可以看出,永磁超环面电机的矢量控制系统中,将系统反馈得到的转子位置信息补偿到终端滑模控制器和PI电流环中,以此来削弱行星轮自转引起的参数摄动对控制系统的影响。电流环输出的电压信号,经由SVPWM模块输出相应的PWM信号,实现对逆变器的驱动,逆变器输出的三相电流实现对永磁超环面电机的驱动控制[22-24]。 表1 永磁超环面电机仿真模型参数设置 图8 空载启动时PI和SMC控制的输出性能 图9 SMC控制的电流响应 在图8基于PI控制中,超环面电机空载启动输出转速的超调量达到14%,电磁转矩在启动时存在较大冲击;在过渡阶段,电磁转矩的波动较大,调整时间为0.7 s。在施加负载转矩时,转速出现4%的瞬态波动,恢复到稳态的时间为0.03 s。在稳态阶段,转速存在2%的周期波动;电磁转矩的周期波动的幅值为60%。由于行星轮自转产生的时变参数,导致永磁超环面电机在输出性能上存在的周期性波动。 在图8基于行星轮转子位置的终端滑模控制中,永磁超环面电机空载启动时,启动转矩冲击明显减小,输出转速达到了无超调的快速响应,调整时间较PI控制缩短了20%。在突然施加负载转矩时与PI控制相比,输出转速瞬态波动减小了3%,重新恢复到稳态的时间减少了50%;在稳态阶段输出转速的波动较PI控制降低了3%,电磁转矩存在6%的波动,较PI控制时削弱了54%,表明该控制对时变参数的摄动具有较强的鲁棒性,输出性能的周期波动也明显下降。 由图9看出永磁超环面电机的空载启动时,启动电流最大为7 A。而在突然施加负载转矩时,电机的三相电流会有较小的超调量,但调节时间较短,在稳态阶段,电流呈毛刺状周期变化。 负载启动时仿真条件设置:启动时施加负载TL=5 N·m,在0.1 s时将负载改为TL=2 N·m,其他设置不变。负载启动时控制系统的仿真结果如图10所示。 图10 负载启动时电机的输出性能 由图10的仿真结果可知, 基于行星轮转子位置的终端滑模控制器与PI控制器相比,在负载启动时,输出转速实现了无超调的快速响应,电磁转矩冲击明显减小,且可以平稳过渡到稳态阶段。突然改变负载转矩时,终端滑模控制的输出转速和电磁转矩实现平稳的无超调过渡,表明该控制策略对外部干扰具有强鲁棒性。在稳态阶段,滑模控制的转速波动较PI控制有明显降低;转矩波动较PI控制低削弱了58%。 通过仿真结果分析,将反馈得到的转子位置信息补偿到控制系统的内外环控制器中,确实可以有效地削弱永磁超环面电机参数摄动的影响,同时基于行星轮转子位置的终端滑模控制器可以有效的削弱电机在输出性能上存在的周期波动。 本文在传统终端滑模控制器的基础上,设计了基于行星轮转子位置信息的终端滑模控制器。通过引入行星轮转子的位置信息,将行星轮自转引起的参数摄动补偿到滑模控制器中,使控制器状态与电机的运动状态相关联,从而削弱行星轮自转引起的内部扰动对系统输出的影响。仿真结果表明该控制策略对参数摄动的具有强鲁棒性、较好的抗外部扰动能力以及良好的响应速度,并且能有效地削弱电机输出特性的周期波动,提高永磁超环面电机的输出性能。研究结果可为后续永磁超环面电机控制策略的研究提供理论依据,也可为提高其输出性能奠定坚实的理论基础。
3.3 控制系统仿真分析




4 结语
猜你喜欢
时代汽车(2022年19期)2022-10-18
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
西部交通科技(2022年2期)2022-04-27
科学家(2022年3期)2022-04-11
计算机测量与控制(2021年10期)2021-11-01