
基于ADAMS 的农业机械仿真设计分析
2022-04-21 01:39济宁市兗州区兴隆庄街道农业综合服务中心刘磊
河北农机 2022年3期
济宁市兗州区兴隆庄街道农业综合服务中心 刘磊
在农业机械化发展进程中,马铃薯农业机械的发展进度迟缓,近年来水平才明显提升,国外马铃薯收获机械的生产应用率明显降低,联合收获机则得到了极大发展,基本已经实现了马铃薯收获机械化。在日常农具中也开始应用高新技术,如振动、液压技术,利用传感技术控制喂入量,我国在该领域的技术研发进度比较迟缓,目前主要集中在中小型悬挂式集条收获机研制推广阶段,各类农业机械用具的技术水平与国外发达国家依然有较大差距[1]。近年来我国部分地区研制的小型收获机设备初试成功,如4UL-2 型马铃薯联合收获机、1650 型带臂式联合收获机等。但是目前传统机械设计方法,依然要面临低效率、低精度、粗略性与近似性结论的问题,为了缩减机械系统设计周期,降低成本投入,提高设备效率与精度,本文将提出基于ADAMS的农业机械仿真设计研究,运用ADAMS 软件建立农业机械仿真模型,优化设计获得最佳工作参数。
1 ADAMS 软件
ADAMS 为机械系统动力学,由美国MDI 公司研发,具备可视化View,高效求解Solver 与强大功能处理模块,在应用中集建模、求解、可视化等多项技术优势于一体化虚拟样机仿真分析软件,是目前广泛使用的权威多体动力学仿真分析软件[2]。在软件使用中可以利用交互式环境、约束库、零件库、力库等,建立参数化机械模型,运用多体动力学理论拉格朗日方程法,建立系统动力学方程,使后处理模块获得输出速度、位移、力度曲线。运用该软件建立复杂虚拟样机,能够在短时间内迅速获得优化后机械设备的相关性能参数,这样一来能够对物理样机的高额研制费用与次数有效减少,从而极大地提升了产品设计质量与研发时间、成本,在农业、工业、交通、机械设计制造等行业得到广泛应用[3]。
2 收获机设备工作原理
4UX-550 型马铃薯收获机设备结构如图1 所示。设备运行中经拖拉机动力输出轴、万向联轴器总成,向偏心轴传递动力,旋转带动前后两个摆臂,转变旋转运动为左右摆动,摆臂摆动带动抖动筛往复运动,马铃薯铲入土层向前运动,在抖动筛内挖起土与马铃薯分离后,在作业带一侧分布马铃薯块,摆动筛可以经筛面振动在掘起物内分离马铃薯,这样在筛面激励下不仅有沿着筛面进行的下行运动,还包括沿着筛面的上行运动与跃起,实现马铃薯抖动与抛落。该机械设备的主要技术参数为:配套动力 13.3~22.1kW,550mm 幅宽,218kg 机具自重,13.5mm 偏心距,150~250 挖掘深[4]。
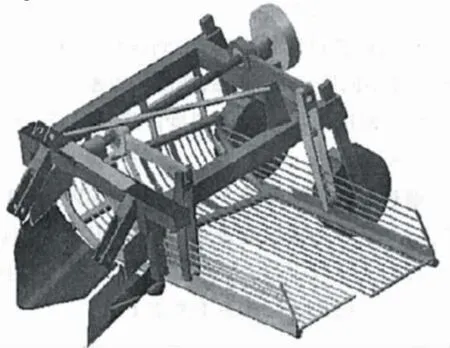
图1 马铃薯收获机结构图
3 ADAMS 机械仿真建模
3.1 设计分析流程
因为ADAMS 机械系统动力学软件具备简化可实现三维建模功能,在处理复杂不规则系统与不规则零件几何时,处理难度就会随之增加,因此通常采用专业三维建模与动力学仿真软件完成。Pro/E 的建模功能尤为强大,能够方便零部件建模装配,联合ADAMS 软件仿真,即可提高复杂机械系统虚拟样机的整体性能[5]。在联合其他软件设计的过程中,首先要建立Pro/E 的各零件三维特征模型,依据具体设计需求干涉所要装的配零部件,向ADAMS 中依据特定格式导入模型,即可完成ADAMS 软件中设定的约束、驱动、相关仿真参数,并进行动力学仿真分析[6]。
3.2 几何建模
本研究设计的马铃薯收获机的几何建模步骤如下:
(1)传动轴与偏心轮、中筛臂、摇臂的关键点坐标见表2,对各关键点完成分别定义;(2)使用Cylinder 在A、B 各点建立偏心轮,设计偏心轮的具体方向,使用LInk 在 C 点建立前筛摇臂,在 G 点建立后筛摇臂;(3)使用 Plate 在 C、D、E 点建立筛中筛臂,在 G、F、H 点建立筛中筛臂;(4)使用Cylinder 与Box 工具与布尔运算,成功建立摆动筛几何模型;(5)依次建立飞轮、悬挂架、铲具与其他构件的几何建模。
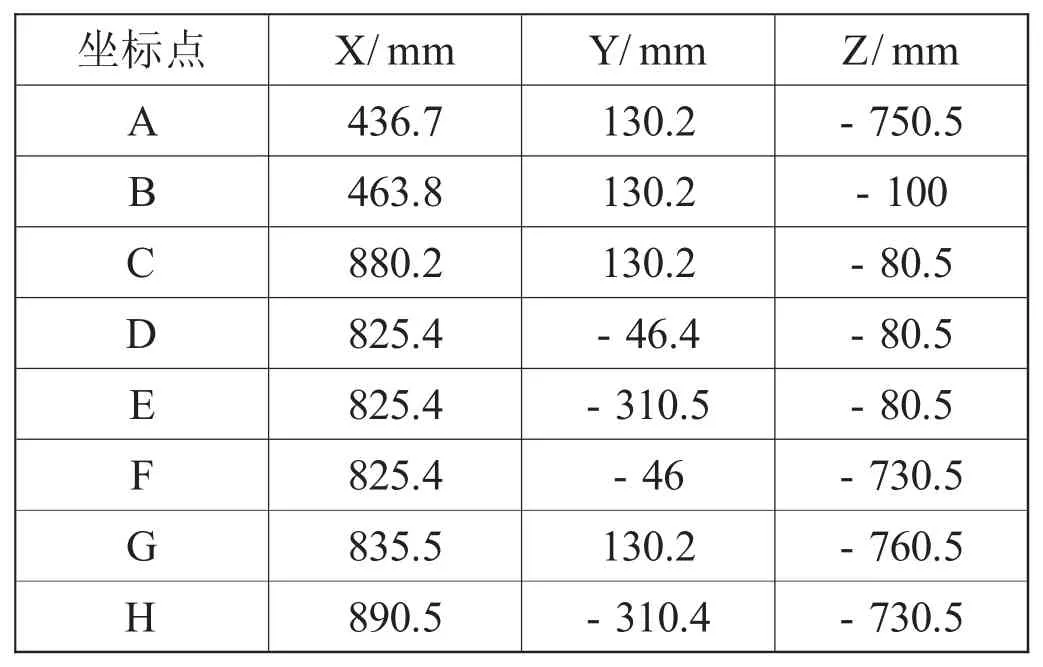
表1 关键点坐标
4 测试样机建模优化设计研究
4.1 初始建模与模型参数化
根据马铃薯收获机的几何模型,建立样机初始模型,设定540r/min 输出轴加载转速,加载0.2s,50 步仿真分析,对摆动筛质心速度与加速度参数进行测量(如图 2、图 3 所示)。

图2 前筛质心加速度

图3 前筛质心速度
通过处理马铃薯收获机的摆动筛传动机构,根据机构在仿真软件中完成各关节点的变量创建,设计变量值包括 POINT_1~POINT_8 与 Loc_x、Loc_y[7]。
4.2 样机模型设计
本文以4UX-550 型马铃薯收获机为例,该设备前后摆动筛交替摆动,相反运动,仅仅对前筛设计展开研究。在试验中,在筛面的倾角为0°~10°时,设计最适用的加速度值,分别为 15~20m/s2、35~40m/s2,在此条件下能够成功分离70%~75%土壤,设计筛面筛物的移动速度范围为0.25~0.5m/s。为了确保最优化分离,将摆动筛的平均加速度取值设为40m/s2,优化设计摆动机构。根据设定的各设备结构变量取值范围,对不同设计变量下所造成的摆动筛加速度影响进行观察,设计前摆动筛加速度均值,具体变量见表2。

表2 设计变量
根据上述设计变量在DV_1~DV-8 中,对机械摆动筛加速度进行均值研究,以获得不同变量取值相应的加速度均值变化情况,发现其中 1、2、4、6、8 达到最大敏感度,DV_1 决定了机械偏心轮的半径值,DV_2 对偏心轮的半径不造成任何影响,所以DV_2 在优化设计摆动机构中不做考虑。表3 为本次研究的设计对应结果情况。

表3 设计研究结果
5 样机模型优化设计
在导入模型后,运用ADAMS 软件设计仿真环境,包括单位、重力、栅格平面方向等。为了尽可能减少ADAMS 仿真软件的仿真计算量,可以使用布尔运算的合并指令,合并同样功能的不同零件为统一零件。因为在该仿真软件中导入各零件,均为无质量几何体,这都需要后期加工生产添加零件属性,对于接触运动物体则需要添加合理范围内的接触作用力,最后虚拟样机运动能够在转动动力曲柄轴的基础上设计旋转方向。根据机构动力学完成仿真设计,运用ADAMS 绘制相关部位的速度、位移、轨迹、加速度、驱动力等参数[8]。结合本次研究设计建模,对上述分析中最大敏感度的几项关键参数,使用Design Variable、Modify 显示数据浏览器,选定可修改数据变量对话框,在选项框内选择输入设设计变量的最大、最小极值,即成功修改了设计变量,如表4 所示。根据多次迭代运算获得DV_1 为463.51,DV_4 为 130.40,DV_6 为 -44.984,DV_8 为-310.55,其中最优点为 41.457m/s2,与 40m/s2这一理论最优值最为接近。

表4 修改设计变量
6 结语
总而言之,在本研究中通过使用ADAMS 仿真软件,对4UX-550 型马铃薯收获机进行动态仿真设计,可获对收获机设备装置造成影响的关键参数,也就是偏心轮偏心半径与中筛臂的臂长,并获得马铃薯收获机在最佳设备分离状态下的关键参数。经设计对比仿真结果可得,4UX-550 型马铃薯收获机的机械传动机构设计合理,经模型优化设计所得仿真结果中的最优点为41.457m/s2,与40m/s2这一理论最优值最为接近。将ADAMS 应用于农业机械设计中,可以对机械结构与各部件功能进行模拟,并且发现设计阶段的样机缺陷,对其进行改进能够有效完善农业机械方案。
猜你喜欢
当代水产(2022年6期)2022-06-29
农机使用与维修(2022年2期)2022-02-21
农机使用与维修(2021年7期)2021-11-29
农机使用与维修(2021年12期)2021-11-27
航空学报(2020年9期)2020-12-02
房地产导刊(2020年6期)2020-07-25
农民致富之友(2019年33期)2019-12-20
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
