一类欠驱动系统的模型参考自适应控制方法
2022-04-29 05:43杨鹏程郑艳秋蒲笑非向思宇
科技创新与应用 2022年10期
杨鹏程,谭 鑫,郑艳秋,黎 婧,蒲笑非,向思宇
(核反应堆系统设计技术重点实验室,四川 成都 610213)
欠驱动系统的控制在工业上有着广泛的应用。比如桁架机器人、起重设备和龙门吊车在工件移位、挂物运输、悬臂抖动和液体晃动抑制等都是典型的欠驱动控制应用场景。此外,目前日益竞争激烈的工业机器人正在遍及不同的领域,以解决传统工业环境中各种条件的限制问题,工业机器人在移动和搬运贮液容器的应用场景将会大量出现,所以对工业机器人末端平滑运动控制以及液体晃动抑制的应用也提出比较高的要求。本文以开放贮液容器运动控制为代表的一类欠驱动系统在保证贮液容器运动过程中快速、精确响应的同时对容器中液体的晃动抑制控制进行研究,对这一类欠驱动系统控制具有充分的理论研究意义和实际应用价值。
从上世纪六十年代开始,国内外研究者们就针对液体晃动抑制提出可行性的控制方法,Singer N C和Singhose W等人提出了基于输入整形技术的晃动抑制控制方法,但是其方法对被控对象的数学模型要求严格并且在一定程度上延长响应时间。哈尔滨工业大学张龙等人在建立固液耦合动力学系统平衡点附近线性化模型的基础上,提出一种基于观测器的鲁棒多目标控制系统抑制液体晃动。北京理工大学臧强对二维和三维液体的小幅晃动动力学和控制问题进行研究,分析高阶模态对系统动力学的影响,使用基础模态频率和第三模态频率作为设计参数设计复合控制器,进而能够消除无穷模态的晃动。此外,还有一些学者在滑模控制和H-inf控制方面展开研究,且都需要先建立较为严格的数学模型,但是在实际中往往不能够建立系统严格的数学模型。本文将基于模型参考自适应控制,对不能够建立严格数学模型的液体晃动抑制这一类欠驱动系统进行研究。
1 基于Lyapunov稳定性的模型参考自适应控制方法
1.1 模型参考自适应控制方法设计
模型参考自适应控制(Model Reference Adaptive Control,MRAC),20世纪50年代后期发展起来的一类特殊的自适应系统,使被控对象在参数未知以及系统具有不可测的动态特性时仍然可以具有良好的控制性能。模型参考自适应控制中,最重要的创新点就是提出参考模型,把对控制对象的系统性能要求首先通过一个已知确定的模型来设计,且这个模型具有和被控对象相似的系统结构,把这个已知确定的模型称作参考模型。同时把对参考模型的输入也输入到被控对象,然后根据稳定性设计的自适应律使被控对象的输出快速跟踪参考模型的输出,使得被控对象满足设计的系统性能要求。模型参考自适应控制的系统框图如图1所示。

图1 模型参考自适应控制框图
如图1所示,设被控对象的状态方程:

其中xp为n维的系统状态向量,u为m维的输入控制向量,且n和m都为已知常数,Ap和Bp分别为n×n系统矩阵和n×m输入矩阵。设参考模型的状态方程:

其中xm为n维的系统状态向量,yr为m维的输入控制向量,且n和m都为已知常数,Am和Bm分别为n×n系统矩阵和n×m输入矩阵。现采用参数可调的前馈控制器K和反馈控制器F来调整被控对象的动态特性,且输入u则:

其中K和F分别为m×m矩阵和m×n矩阵。为求自适应机构中的自适应律,定义广义状态误差向量:

根据实际情况,选取Lyapunov函数:

其中,P为n×n维正定对称矩阵,R1和R2为m×m维正定对称矩阵,符号tr表示矩阵的迹。由于Am为稳定矩阵,则可以选择正定对称矩阵Q′,使得成立。工程上,Q′通常取为单位矩阵。所以式(5)也可为:
式(7)和式(8)即为液体晃动抑制模型参考自适应控制方法(MRAC)自适应机构的前馈控制器和反馈控制器的自适应参数调节规律。其中F(0)和K(0)为初值,和为m×m矩阵,主要是根据试验来确定。

根据式(7)和式(8)确定的自适应参数调节规律在输入连续时,该自适应系统是全局稳定的,即:

1.2 奇异系统矩阵参考模型的设计
本文研究对象为二维状态下开放贮液容器的液体晃动抑制,采用摆动的小球来等效容器中晃动的液体,其小球及摆线晃动的角度θ及其对时间的微分可以表征液体晃动的程度,其等效力学模型如图2所示。
根据图2所示等效力学模型,根据参考文献建立的状态空间方程的系统矩阵:

图2 液体晃动的等效力学模型

本文考虑的等效力学模型为参数已知的确定模型,其中yr为参考模型输入项。然后可以根据二次最优控制方法(LQR)对本文中参数已知的确定模型进行二次最优设计,可以得到:

其中R为对应于系统输入向量的权重矩阵且为n×m的实对称半正定矩阵,G为由系统(A,B,C)设计的逆稳态增益,且G=-[C(A+R-1BTK)-1B]-1。Am满足Re{eig(Am)}<0,即参考模型的系统矩阵Am特征根的实部均位于复平面的左半部分,保证参考模型的系统矩阵Am是稳定矩阵。
2 仿真研究与分析
根据1.2节设计的参考模型,结合基于输入整形技术的PID控制方法进行仿真研究与特征对比分析,理想输出的结果如图3所示。
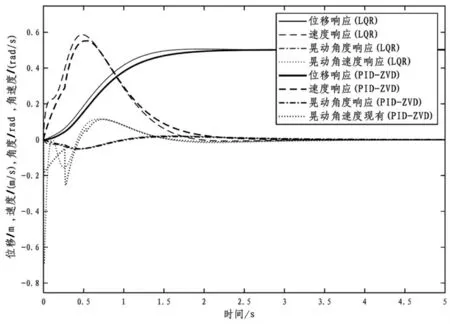
图3 LQR控制方法与PID-ZVD控制方法响应的比较
系统的理想输出即参考模型输出的稳定时间相较于PID-ZVD控制方法增快0.895 s,增快36%,且液体的晃动程度都很小。
根据1.1节理论推导设计参考模型及自适应控制律,且被控对象系统参数未知,调节自适应参数可得到仿真结果如图4所示MRAC控制方法中参考模型与被控对象的位置响应和速度响应误差和如图5所示MRAC控制方法中参考模型与被控对象的响应性能。整理仿真实验数据,未知参数系统的响应的具体数值见表1。

图4 参考模型与被控对象的位移响应和速度响应误差
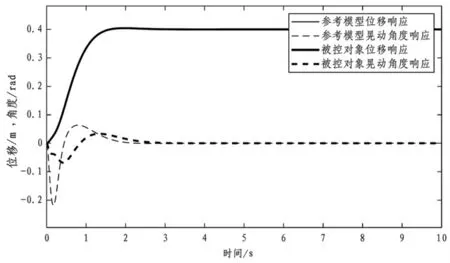
图5 参考模型与被控对象的响应性能
结合表1所示实验结果,通过模型参考自适应律对前馈控制器和反馈控制器的调节能够使参数未知的被控对象很好地跟踪参考模型的控制性能,具体表现:

表1 模型参考自适应控制的性能比较
(1)MRAC控制方法的系统稳定时间、最大瞬态晃动角度以及残余晃动幅值均能较好地跟踪参考模型的响应时间,即达到系统期望性能指标。
(2)MRAC控制方法相较于LQR控制方法的伺服电机最大驱动力较小。
通过对仿真数据的分析发现参数未知的被控制对象的未知误差响应在稳态时小于1.0×10-5m能够保证非常好的跟踪性能。如图6和图7所示分别为MRAC控制方法中参考模型和被控对象的响应。
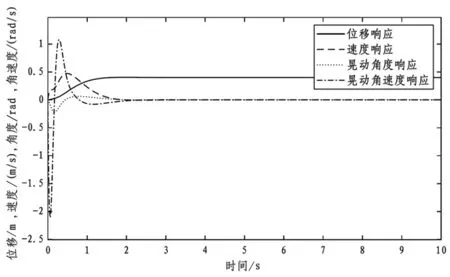
图6 参考模型的响应
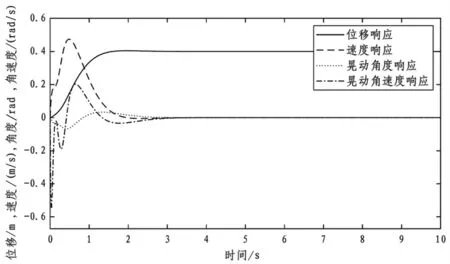
图7 被控对象的响应
3 总结与展望
本文主要针对这一类欠驱动系统的各种不确定性,包括系统中的未建模动态、诸多的非线性现象以及系统在运行中的干扰,提出基于模型参考自适应晃动抑制控制方法,并在仿真中通过不同的系统参数来验证控制算法的自适应性能。
本文提出的液体晃动抑制模型参考自适应控制方法(MRAC),对于奇异系统矩阵Lyapunov函数无解的情况,结合二次最优控制的参考模型设计方法,设计得到稳定的参考模型系统矩阵,为MRAC控制方法提供保证并且获得期望的系统性能,系统响应性能快速跟踪参考模型的响应性能。本文在二维环境中成功实现贮液容器位移的快速精确响应、液体的晃动抑制和系统输入能量最小等运动过程中液体晃动抑制的多目标的优化,但在未来的研究工作及工业应用中推广还需考虑三维环境中液体晃动抑制问题,并展开进一步的研究。
猜你喜欢
作文周刊·小学一年级版(2022年24期)2022-06-18
环球时报(2020-08-11)2020-08-11
家教世界·创新阅读(2020年2期)2020-04-07
读与写·教育教学版(2017年10期)2017-11-10
小天使·一年级语数英综合(2017年1期)2017-02-16
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
广东第二课堂·初中(2009年8期)2009-08-26