
复杂地形中消费级无人机倾斜摄影测量技术研究
2022-05-05 05:42焦世强
经纬天地 2022年1期
焦世强
(中煤科工集团武汉设计研究院有限公司,湖北 武汉 430064)
0.引言
随着基础建设速度的不断推进,传统的数字测图手段如全站仪、经纬仪、GPS-RTK等,由于生产效率低、经济成本高,逐渐被倾斜摄影测量技术所取代。与传统单点数据以及单一正射影像的获取不同,无人机倾斜摄影测量技术由于机动灵活、作业效率高,可以快速、高精度获得数字3D产品,因此在工程建设中有着广泛应用。传统的航测无人机主要以固定翼和多旋翼为主,倾斜摄影测量作业时多搭载五镜头,从不同角度直观、精准、有效地获取测区影像数据,但是由于无人机体积大、造价昂贵,并且无人机镜头售价高昂,操作较为复杂,专业性较高,对于中小项目而言,消费级小型多旋翼单镜头无人机由于经济、高效、轻便,因此在倾斜摄影测量中也有着广泛应用。相比较测绘级无人机,利用消费级无人机进行倾斜摄影测量,一方面提升了测绘工作效率;另一方面又降低了测绘成本。
近年来以大疆为主的消费级无人机由于其诸多优点,在精度要求不高的小区域倾斜摄影测量方面有着广泛应用[1]。但是由于消费级无人机镜头搭载数量有限,且差分定位精度低,因此需依靠像控点提高倾斜模型精度。但是目前针对消费级无人机低空倾斜摄影还没有明确要求,且相关应用主要是地势平坦区域,针对地形复杂、地势起伏较大的场地相关研究较少。本文以某测区为例,以消费级无人机为主要作业方式,对该复杂区域倾斜摄影测量像控点的布设方式进行探讨。
1.测区概况及飞行方案设计
1.1 测区概况
测区位于某市某景区山顶,该山顶为古代祭祀遗址,现急需对山顶进行旅游规划,因此要获取遗址三维数字化模型,方便后期量测和设计。测区面积约为0.85km2,东西长0.83km,南北长约1.03km,测区周围环境复杂,植被茂密,地势陡峭险峻,最大高程差超过70m(如图1所示)。大型无人机从山脚飞行到山顶直接进行数据采集难度大,而山顶数据采集时大型无人机设备又难以携带,因此通过人工携带多旋翼小型无人机设备进行数据采集。

图1 测区概貌
根据《低空数字航空摄影规范》(CH/Z3005—2010)中关于航高保持的规定,同一航线上相邻像片的航高差应大于30m;当无人机的相机镜头不可变焦时,地面分辨率随航高而定,为保持航测时地面分辨率相对统一,相应的测区地物海拔高差也应不大于50m。因此,本文认为复杂地形可以指地物海拔高差大于50m的场地,实验测区满足复杂地形要求。
1.2 外业飞行参数计算
本次作业选择的是大疆Phantom 4 RTK无人机,该款无人机属于小型高精度航测无人机,主要应用于低空摄影测量,具有厘米级导航定位精度,在小场景航测方面有一定应用,但是在复杂地形中,相关应用不多。根据《低空数字航空摄影测量外业规范》,相对航高计算公式:,大疆Phantom 4 RTK无人机有效像素为2000万,(f焦距)为24mm;光感原件尺寸为6mm×4mm,分辨率为4900×3700,则a(像元尺寸)约为1.2um;GSD(影像地面分辨率)为3cm,则确定飞行高度为60m,本项目应布设像控点数量不少于6个。
1.3 飞行方案设计
传统的正射影像图主要通过飞行器搭载垂直镜头进行影像数据获取,但是由于拍摄影像数据有限,因此缺少地物地貌的三维信息。倾斜摄影测量与正射影像图测量外业数据采集流程基本相同,但是倾斜摄影测量搭载多镜头,可从多角度采集外业数据,因此内业成果不仅能够最大程度地反映真实的地物地貌纹理特征,还能精确地匹配坐标位置信息。具体操作流程如下:(1)测区踏勘。搜集测区纸质或者数字资料,实地踏勘测区环境,根据测区实际情况选择靶标和无人机类型;(2)规划设计。根据测区现状和无人机类型,计算规划出无人机飞行航线、作业时间段、备用电池数量、飞行高度、航向和旁向重叠度等;(3)像控点布设和测量。根据测区现状选择像控点坐标采集方式,本项目选择GPS-RTK进行像控点坐标数据采集;(4)影像数据采集。利用移动端操控无人机,使其按照事先规划飞行线路进行倾斜多角度影像获取;(5)内业数据处理。应用数据处理软件,进行空三加密和特征点匹配,若有需要及时补测,进行实景三维建模,制作正射影像图和数字线划图。
由于本测区高差较大,因此本项目设计出阶梯式环绕航摄方案,根据测区地物不同海拔高度设置不同航高。相对平坦的测区设置同一航高,相同航高的相邻区域的环绕圆相互交叠;不同地物目标设置不同的航高,并设置一个补偿高度,让相机主光轴对着测区地物中上部,拍摄时焦点聚焦于中上部,为后期良好的模型效果提供保障;根据地物的高度可设置多个具有补偿航高的环绕圆,形成不同阶梯数的环绕航摄方案[2]。但是阶梯式环绕航摄方案的难点是不同飞行高度量测影像间的连接点问题,如果重叠率不够则无法通过同名点匹配。因此外业数据采集时利用过渡影像作为“桥梁”,将不同航高的航摄影像联合起来,保证不同高度影响有足够的重叠率,飞行方案(如图2所示):

图2 阶梯式环绕拍摄目标示意图
1.4 飞行镜头设计
倾斜摄影测量一般采用多镜头方式进行影像数据采集,但是对于消费级无人机而言,由于只搭载一个镜头,因此单次飞行只能获得相同角度的影像数据,但是大疆Phantom 4 RTK无人机的云台可以设置不同角度进行影像数据采集,为了对比不同影像空中三角测量的精度,本文在同一测区、相同控制点数量以及相同控制点布设方案下,设置不同镜头数,包括倾斜摄影(左、右)、下视摄影(下)和多视摄影(前、后、左、右、下)进行影像数据采集和对比分析,利用平面中误差和高程中误差作为评价指标,分析得到不同影像空中三角测量精度结果[3]。不同镜头采集模式下空三测量精度对比(如图3所示):

图3 不同镜头采集模式下空三测量精度对比
多角度影像数据多,覆盖的影像越多,所包含的空间和纹理信息就越多,地物地貌特征更全,空三解算时则特征点数量多,错误匹配点数量少,模型精度高。一般而言镜头数量越多,则建模的效果就会越好。从图3可以看出:在三种影像中,倾斜摄影(双镜头)采集的影像提交空三解算时,中误差下降幅度最大,并且相同控制点数量下,倾斜摄影(双镜头)的中误差最大,其次是下视摄影(单镜头)的中误差,而多视摄影(多镜头)的中误差最小。分析认为,倾斜摄影的误差最大的主要是像片倾斜会造成像点位移,从而导致误差增大。因此在实际倾斜摄影测量外业中,使用多镜头进行摄影测量时,可以获得更好的测量精度。
2.像控点布设方案探讨及精度评价
2.1 像控点布设方案设计
消费级无人机在外业数据采集过程中易受多种因素的影响,如当无人机搭载倾斜相机进行数据采集时,一般旁向重叠度低于航向重叠度,可能导致中间区域精度高而四周测量精度低的现象。因此,需要加强对测区边角的控制,同时还要尽可能减少控制点的布设数量,从而有效提升测绘效率。像控点是倾斜摄影测量控制加密和测图的基础,像控点布设方案选择直接影响模型成果的精度。其作用原理是在空三解算时,主要纠正无人机因定位受限或电磁干扰而产生的位置偏移、坐标精度过低等问题,因此像控点数量对平面和高程中误差影响呈现正相关,但是并不是像控点数量越多,精度就越高,当像控点达到一定数量时,模型精度将维持在稳定状态。
经过实地调查,并结合实验区植被覆盖情况、测区面积、地物标高等,共设计了4种布设方案,依据“均匀布设原则”,像控点采用直角模具涂刷和标靶板的方式,以方便与周围环境进行区分,像控点坐标采集使用的是GPS动态测量方法。除了像控点外,另布设10个检查点,布设检查点的目的是方便精度检验,检查点坐标同样采用GPS动态测量方法,均匀分布在测区范围内。
2.2 像控点布设方案优化
根据消费级无人机航测空中三角测量影像的特点和对测区的影像覆盖特征,共设计了四种像控点布设方案,三角形表示控制点(如图4所示),检查点数目和位置均相同(红色十字形标记)。具体设置情况:方案1为四角单点布设,共布设4个像控点,像控点布置在测区4个角点;方案2除了在4个角点布设外,测区中心也布设1个像控点,共布设5个像控点;方案3为四周+中心点布设方案,测区边缘和测区中心都布设像控点,本方案共布设7个像控点;方案4为均匀像控点布设方案,即在测区范围内均匀布设控制点,共布设11个像控点。
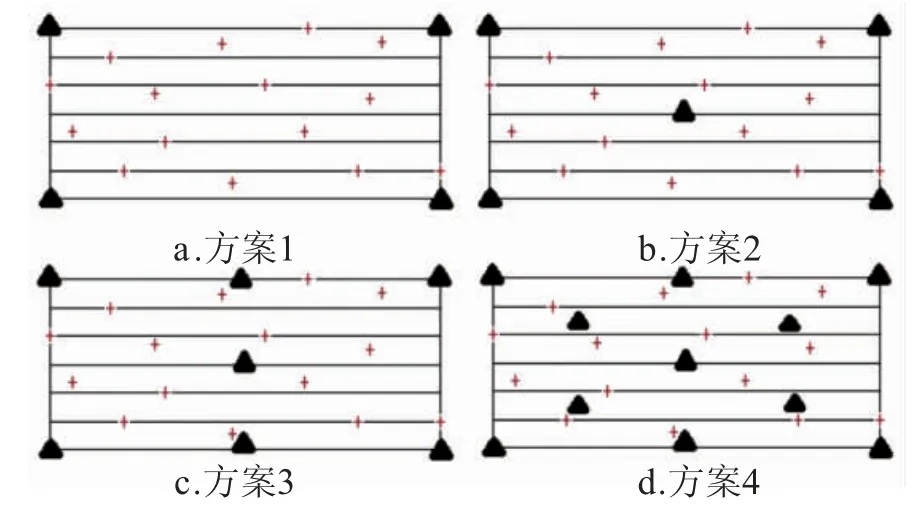
图4 四种像控点布设方案
2.3 精度评价
精度分析主要以野外检查点实测坐标为基准,从平面点位与高程两个方面对空三加密检查点精度进行分析,从而评估最优布点方案[4]。各检查点精度计算公式如式(1)所示:

式(1)中,σx、σy、σz分别为各方案中检查点x、y、z方向的单位权中误差,单位为mm;Ms为各方案中检查点点位中误差,单位为mm;X、Y、Z分别为8个检查点的实测坐标。依据《测绘成果质量检查与验收》(GB/T 24356—2009)要求,对4种方案的倾斜摄影测量模型成果拾取检验点坐标,与外业实测坐标对比进行成果精度统计[5],各方案的成果精度统计(如表1所示):

表1 检查点精度统计 单位:m
根据表1得到平面高程中误差直方图(如图5所示):
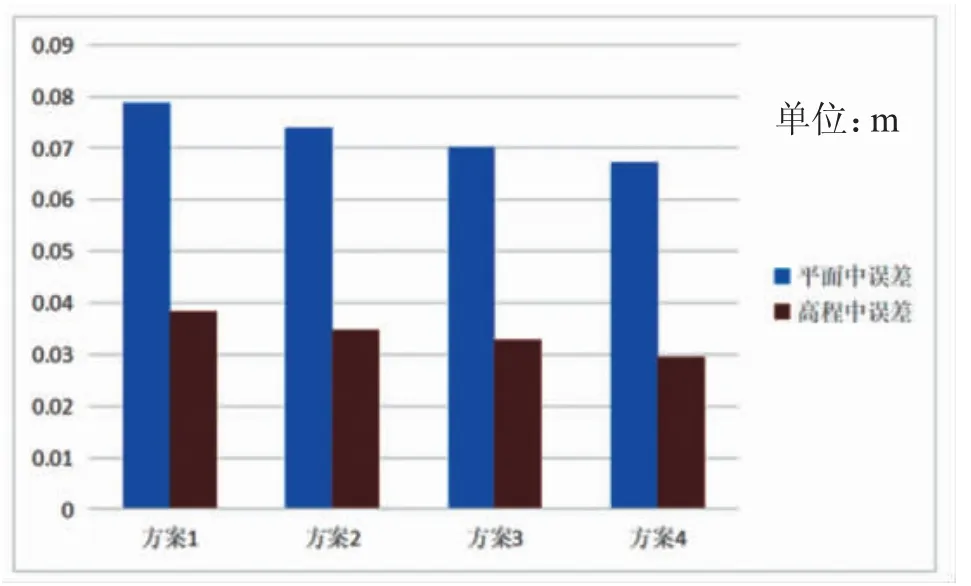
图5 不同方案检查点精度统计图
从图5可以看出四种方案中,检查点平面中误差和高程中误差都随着像控点数目的增加,相关误差都逐渐减小。其中方案4像控点均匀布设方案测量精度最高,平面中误差和高程中误差都最小,但是该方案的控制点较多,外业测绘工作量相对较大;方案1即只采用区域四角布设方案时,相关精度都是最低,该方案只适用于在受灾或者测绘人员无法达到测区中心的情况;方案2和方案3既保证精度满足相关要求又兼顾了作业效率。综合来看,无论在地势平坦还是环境复杂的测区,如果对成果精度要求较高,宜选用区域网均匀布设方案;当测区环境复杂,无法均匀布设像控点时,宜根据测区实际情况,在测区四周边缘薄弱区域加强对测区边角的控制。
3.结束语
消费级无人机在复杂地形中倾斜摄影测量技术克服了传统手工建模效率低、成本高的局限性。本文通过对复杂地形中三维模型重建像控点布设方案研究和精度评价,得出:采用测区周围均匀布设及加强测区边角控制的控制点布设方法进行空中三角测量时,具有较高的成果精度,能够满足绝大多数实际要求。研究结果对高精度智慧城市模型重建、三维地理空间信息分析以及真实反映客观地物并进行量测等方面具有重要参考价值。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
计算机系统应用(2022年4期)2022-05-10
一重技术(2021年5期)2022-01-18
天津医科大学学报(2021年4期)2021-08-21
矿产勘查(2021年3期)2021-07-20
河北地质(2021年4期)2021-03-08
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中国铁道科学(2019年5期)2019-10-19
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年11期)2018-08-04
