
激光大气运动参数测量技术研究进展及展望(特邀)
2022-05-07 03:30岳亚洲李彬雷宏杰
光子学报 2022年4期
岳亚洲,李彬,雷宏杰
(1 中国航空工业集团公司西安飞行自动控制研究所,西安 710065)
(2 飞行器控制一体化技术国防科技重点实验室,西安 710065)
0 引言
机载大气数据系统[1-2]用于测量飞机飞行中大气总压、静压、总温、攻角等参数,输出影响飞行安全及性能的重要大气运动参数,如真空速、攻角(也称迎角)、侧滑角、气压高度、指示空速、马赫数等,是现代飞机航电系统不可或缺的组成部分,在飞机控制中扮演着重要角色,表现在:1)它是飞行控制系统的重要信息源,如真空速、迎角、侧滑角等是实现飞行控制系统闭环控制的重要参数;2)它是机载导航系统的重要信息源,如气压高度是重要的导航参数,另外它可与GPS、惯导及气象雷达系统的数据互补融合,增强导航信息重构能力;3)它为飞行员提供重要的指示信息,在起飞和降落模式下,真空速、迎角等参数为飞行员提供避免飞行器失速的重要数据,在巡航模式下,指示空速、马赫数为飞行员提供精准的飞行状态数据。
传统机载大气数据系统基于空气动力学原理,以皮托管(或称总静压管、空速管)测量大气的静压和总压,结合温度、攻角等传感器感受飞机飞行时的大气总温、大气静压、攻角等信息,经过源误差修正后按标准大气数据方程解算出真空速、指示空速、马赫数、气压髙度、大气密度比、大气总温、真实攻角等大气参数。但由于其机械式及非线性的测量原理,使得其存在一些固有缺陷,表现在:1)低速、大机动时测量失灵;2)气动延时明显,响应慢,控制带宽小;3)跨音速区空速测量误差大;4)需要复杂的补偿校准,试飞周期长,校准及维护费用高;5)测量气流受机体或旋翼干扰,测量误差大;6)空速管易结冰堵塞;7)空速管产生一定的雷达散射截面和气动阻力,降低飞机隐身性和气动特性。
20 世纪70年代开始,欧美等多家研究机构开展激光方法测量大气运动参数[3-7]。该方法利用光学多普勒测量原理,具有以下优点:1)测量灵敏度及精度高;2)无气动延时,响应快,控制带宽大;3)可避开机体或旋翼影响,测量准确度高;4)全速度范围内测量线性,测量范围大、误差小;5)内埋式安装,无结冰风险、隐身性及气动特性好。
本文介绍了激光方法测量大气运动参数的基本原理以及目前主流的两种实现方案,重点综述了近年来激光大气运动参数测量技术在大气运动参数精确测量、传统大气数据系统飞行校准以及飞机前方风切变、湍流探测应用的发展情况,并对激光大气运动参数测量技术的发展趋势进行了展望,旨在为从事大气运动参数测量技术和应用技术研究的人员提供有益的参考和新的思路,推进激光大气运动参数测量技术在航空领域的深入应用。
1 激光大气运动参数测量技术原理与方案
1.1 测量原理
利用激光方法测量大气运动参数的基本原理是:向空气中发射多束相互独立的激光,如图1 所示,发射激光与空气中的粒子(气溶胶、大气分子等)作用后,由于多普勒效应,与发射激光相比,散射激光信号的频率产生一定的变化量,称为多普勒频移,收集后向散射信号,探测并解算出该多普勒频移,根据式(1)可计算出激光的视线方向速度。

图1 激光大气运动参数测量示意图Fig.1 Schematic diagram of laser measurement method for air motion parameters

式中,V为激光视线方向的相对运动速度;λ为发射激光的波长。通过测量多普勒频移Δf,可以得到沿激光视线方向的相对运动速度。
测量多个激光视线方向速度后,按照以下方法反演三轴真空速[8-9]。首先建立光学天线坐标系,如图2所示,z为激光发射的法线方向,x和y为垂直于法线方向的平面内的两个正交轴,则可定义激光束与z轴夹角为仰角θ,激光束在x-y平面上投影与x正半轴夹角定义为方位角φ。因为视线速度为三轴真空速Vx、Vy、Vz在视线方向上的投影,因此,视线速度V表示为

图2 多波束测量空速反演坐标系Fig.2 Inversion coordinate system with multi-laser beam for air speed measurement

式中,N束激光测量,其视线速度与三轴真空速的关系可表示为

为了获得三轴真空速,需要测量至少3 个独立不相关的视线速度V。对(3)进行矩阵运算,可解算出光学天线坐标系下的三轴真空速。通过测量光学天线相对于飞机机体坐标系的安装姿态角,可进一步计算出飞机机体坐标系下的三轴真空速Vx0、Vy0、Vz0。
反演出机体坐标系下的三轴真空速后,可由式(4)解算出真空速VTAS,攻角α、侧滑角β。

针对激光方法测量大气参数的技术名称,文献有多种不同表述[3-7],包括激光多普勒测速仪、激光风速计、光学大气数据系统等。1987年,KRISTENSEN L[10]创造了“激光大气运动传感器”的名词,随后KEELER R[11]使用“一种机载激光大气运动传感系统”的名称。考虑到实际测量参数是与飞机运动状态相关的大气参数,本文统一将该类技术称为激光大气运动参数测量技术。
1.2 测量方案
根据与激光作用的大气粒子的不同以及对多普勒频移Δf解算方案的不同,可将激光大气运动参数测量技术分为直接探测和相干探测两种。
直接探测方案探测大气分子的散射光信号,采用光学鉴频器将多普勒频移量转换成光强度变化量,探测光强度变化可得多普勒频移量,进而解算出激光视线方向的速度,若能测量出至少三个非相关激光方向的视线速度,可反演出三轴真空速,进而计算出迎角和侧滑角。除了以上参数测量,直接探测方案还可以通过测量回波信号的光谱谱线宽度、强度等变化解算出大气温度、大气密度等参数,进而解算出全部的大气运动参数。为了获得较强的激光散射信号,同时减小天空背景辐射的干扰,直接探测方案通常选用短波长的激光,典型的激光波长有532 nm、355 nm、266 nm。采用的光学鉴频器有FP 标准具、原子或分子滤波器、光纤滤波器等。常用的鉴频方案有边缘检测法、条纹检测法等。
图3 所示的直接探测方案,通过将Nd:YAG 固体激光器三倍频后,得到355 nm 紫外激光并发射到空气中,激光与空气分子作用后,一部分的后向散射信号重新进入系统,通过分光系统分别进入光学鉴频器,采用光电倍增管(Photomultiplier Tube,PMT)探测鉴频器输出,通过分析光电倍增管的输出,可以得到真空速、大气温度、大气密度等大气运动参数。
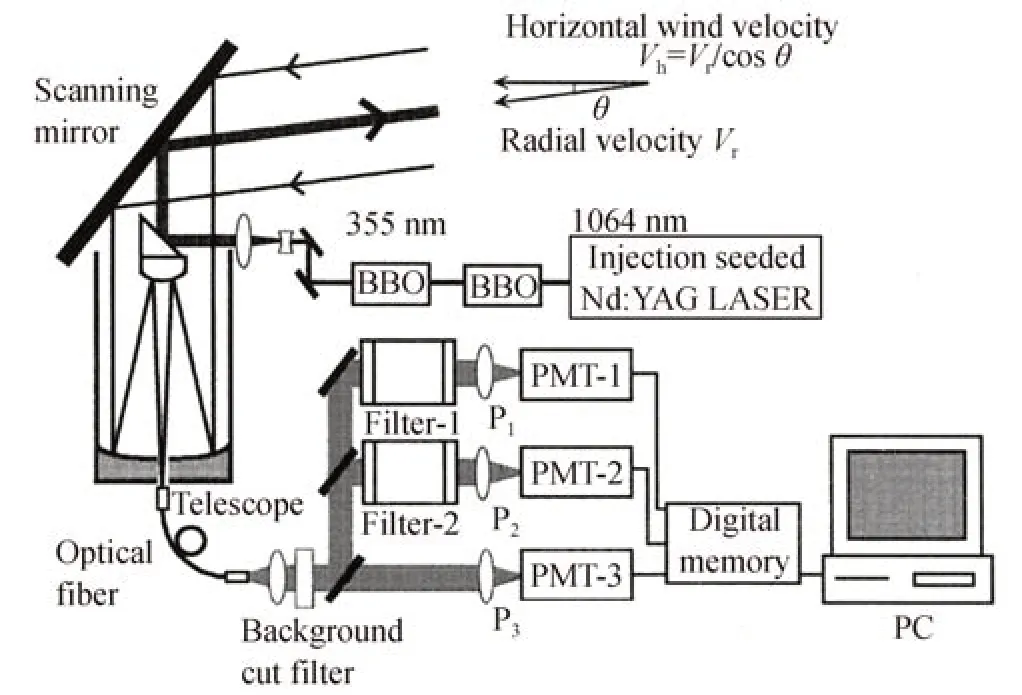
图3 直接探测原理图Fig.3 The schematic of direct detection
相干探测方案探测大气气溶胶粒子的散射光信号,采用数字鉴频方法,通过高速模数转换器(Analog to Digital Converter,ADC)采集中频信号,对采集的数字中频信号通过快速傅立叶变换(Fast Fourier Transform,FFT)得到信号的频谱信息,对信号频谱进行估计解算出多普勒频移量,进而得到激光视线速度。同样若能测量出至少三个非相关激光视线速度,可反演出三轴真空速,进而计算出迎角和侧滑角。相干探测方案的典型激光波长有2 μm 和1.5 μm,常用的频谱估计算法有质心法、高斯拟合法、极大似然估计法等。表1 对比了直接与相干探测方案的优缺点。
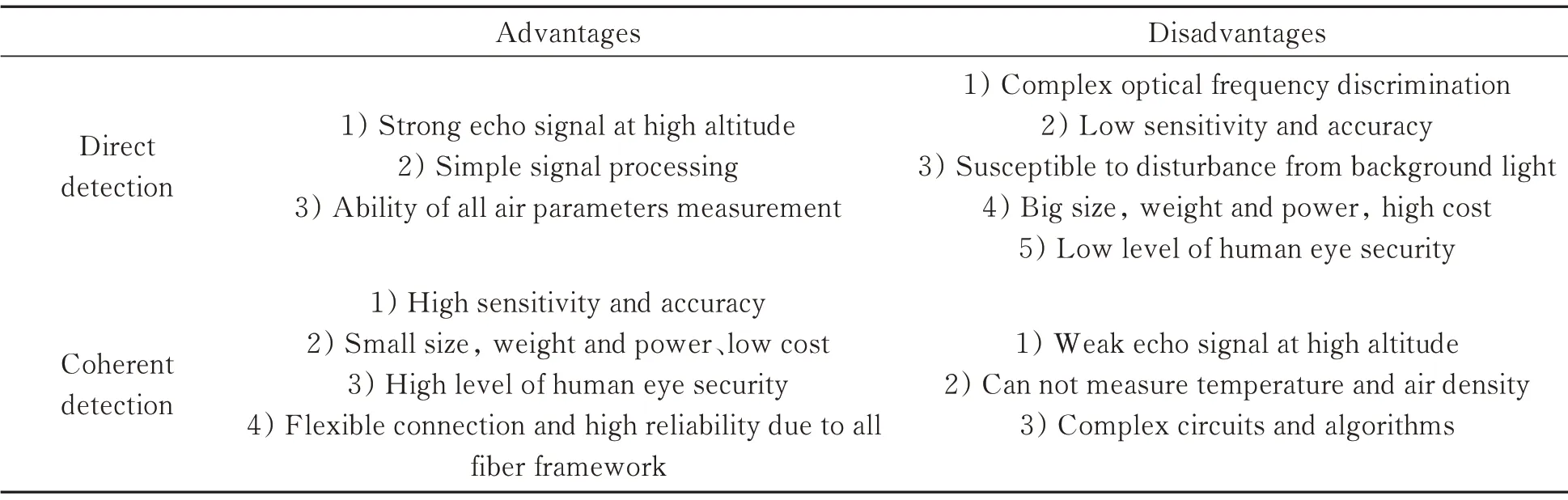
表1 直接和相干探测方案优缺点对比Table 1 Advantages and disadvantages comparison of direct and coherent detection schemes
图4 所示的相干探测方案,种子激光器发射激光通过光纤耦合器分成两束,一束作为本振光另一束作为信号光用于探测。信号光经过频移、调制、放大等处理后,通过光学天线发射到空气中。信号激光与大气中的气溶胶粒子作用后,一部分的后向散射信号重新被光学天线接收而进入系统,与本振光进行外差干涉。干涉后的中频信号被平衡探测器探测后转换为中频电信号,通过ADC 将其变换为数字信号,数字信号经FFT 变换得到信号的频谱,对频谱进行估计可得激光视线速度,进一步反演数据可得三轴真空速、迎角及侧滑角。
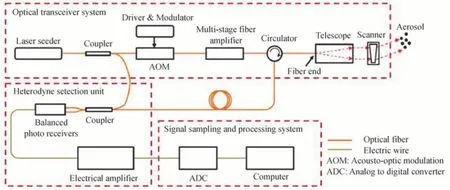
图4 相干探测原理图Fig.4 The schematic of coherent detection
2 激光大气运动参数测量技术的应用
自激光技术应用于大气运动参数测量之日起,人们就有意将其应用于机载大气参数的精确测量,替代传统大气数据系统或与其共用,以获得稳定可靠且高精度的大气运动参数,提高飞行安全性及可靠性。此外,由于激光大气运动参数测量技术在全飞行包线内具有高精度、误差小的测量优势以及可避开直升机旋翼下洗流影响、无需复杂校准、安装维护方便等特点,将其应用于校准传统的大气数据系统,具有校准操作简单、周期短、成本低、精度高的优点。随着航空技术的发展,飞行安全性及舒适性得到了不断关注,人们开始研究将激光大气参数测量技术应用于风切变、湍流等的探测,以提高飞行安全性、经济性及舒适性。本节重点综述激光大气运动参数测量技术在上述三个领域的应用。
2.1 高精度大气运动参数测量
传统大气数据系统存在空速管结冰或异物堵塞、迎角及侧滑角传感器失灵等风险。尽管机载大气数据系统采用了多通道的冗余配置,但多起有重大影响的空难仍与传统大气数据系统测量失效有关。如2009年,法航447 空难,原因是空速管遭遇暴风雨冻结,空速信息错误,造成飞机失速坠毁;2015年英国一架Flybe航班起飞后又返航,原因是密封卡住了空速管;2018年,俄航一架安−148 飞机坠毁,原因也是空速管结冰导致速度信息错误;2018年和2019年,印尼狮航和埃塞俄比亚航空的两架波音737 max 先后坠机,直接原因是迎角传感器故障。图5 为空速管结冰实物图。

图5 空速管结冰图Fig.5 Actual drawing of pitot tube icing
虽然飞机上采用多套大气数据系统的冗余设计,但并未很好地达到预期的设计与安全目标。这既与多通道冗余大气数据系统的具体实现有关,也与冗余设备工作原理相同、环境适应性相似、存在共性隐患有关。因此,面向未来飞机更加安全、舒适和经济的设计目标,有必要在当前的多通道冗余设计的基础上,进一步增加与当前测量原理不同、信息源独立的大气运动参数测量系统,与传统大气数据系统互补应用,构成非相似冗余设计,从根源上提高大气参数测量的可靠性和准确性。激光大气运动参数测量系统正是所需的系统。
1971年,Honeywell 公司在CV990 飞机上进行空速测量试验[7],试验装置如图6 所示,使用0.6 μm 连续激光实现飞机外20 m 处的空速测量,在世界范围内首次飞行验证了激光测量空速方案的可行性。随后在1994年[8],其报道了基于二极管泵浦的1.064 μm 激光的紧凑型激光多普勒光学大气系统方案,探测飞机前方20 m 处风场,同时指出该系统可作为多功能传感器用于探测飞机前方大气湍流、风切变。1993年,NASA[12]使用波长为10.59 μm 激光器研制三轴大气数据系统,光束聚焦距机身20 m 处,该系统在F-16 上进行飞行试验,最高飞行高度15 200 m,最大飞行速度1 018 km/h,空速测量误差小于1 m/s,同时对攻角和侧滑角进行了测量。2012年美国OADS 公司[13]光学大气数据系统在休伊直升机上进行了飞行试验。随后,该公司对系统进行了升级,并于2014年在空客公司的“海豚”(Dauphin)直升机上完成了飞行试验验证,验证了空速、迎角、侧滑角等参数高精度测量性能。针对此次飞行试验,空客公司指出激光方法测量大气参数具有空速管所不具备的三轴、低速、甚至负速下高精度测量优点,具有很强的应用潜力,同时认为激光大气参数测量技术的高精度和实时性的优点,未来将极大地改变直升机设计方案和操纵方式。目前OADS 公司正与空客公司联合开展产品适航认证,预计2022年左右将在直升机上装备应用,图7 为OADS 公司的产品。受欧盟“未来大气数据系统模块化评估”(FAME)计划资助,2020年德国DLR 开始研制激光大气数据系统,旨在补充或取代现有的大气数据传感器,以提高飞行可靠性,减少校准传感器的工作量。方案采用了三种不同的激光测量技术:激光多普勒风速计,用来测量相对风速;紫外瑞利散射法,获得空气温度;激光吸收光谱法,测定气压从而确定飞行高度。该系统计划2022年在“猎鹰”20 测试平台上完成首飞。
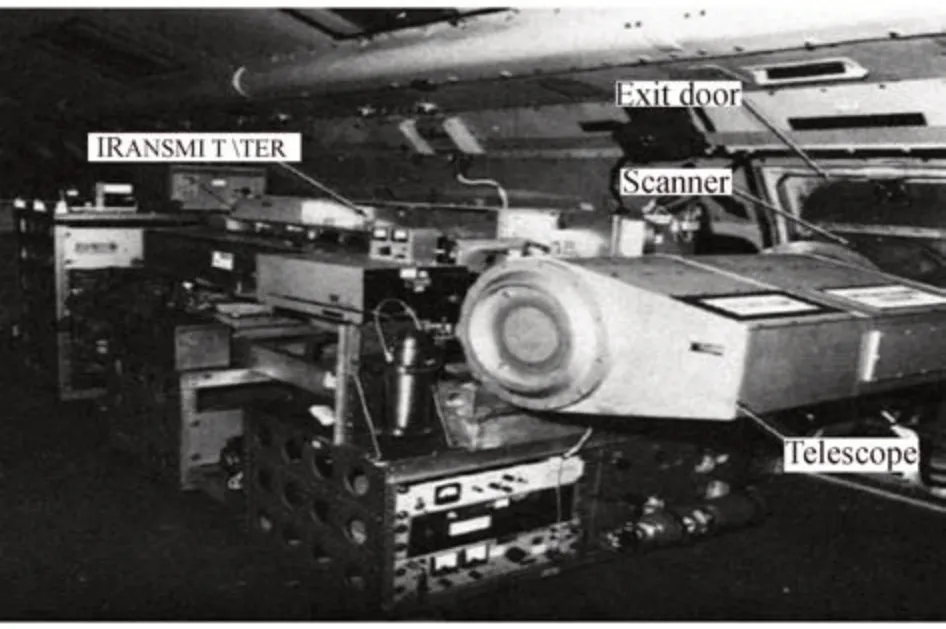
图6 CV990 上的空速测量系统Fig.6 Airspeed measurement system on CV990

图7 OADS 公 司WindSceptor 产 品Fig.7 WindSceptor product of OADS Corporation
与上述方案不同,美国Ophir 公司和密歇根航宇公司(Michigan Aerospace Corporation,M.A.Corp.)一直致力于直接探测方案的激光大气运动参数测量技术研究。Ophir 公司研制始于20 世纪80年代,分析其公开的专利[14-17],方案采用253.7 nm 激光探测以及蒸汽滤波器边缘检测鉴频方案,专利展示了激光发射和接收光路方案、鉴频方案以及多普勒频移的计算方法,讨论了空速、迎角、侧滑角、大气温度、大气压力等计算方法,还针对风能选址评估、风力涡轮机控制、气象监测、交通安全、机场安全等应用进行了讨论。据报道,Ophir 公司正与UTC联合开发下一代激光大气运动参数测量系统,计划将其与传统大气数据系统协同工作,构成智能大气数据系统,提高飞行安全、效率和自主控制能力。图8 为Ophir 公司网站上公开的激光大气运动参数测量系统。2001年,M.A.Corp.[18-20]报道了其研制的直接探测系统原型机方案,系统采用266 nm 激光以及FP 标准具的条纹检测鉴频方案实现空速测量。2003年,开展了风洞试验,与空速管数据吻合,偏差小于2 m/s,并指出该系统还可以用于飞机前方风切变、晴空湍流等探测。2004年,在原型机基础上,改进设计了原型机II,并进行了地面风洞测试以及振动性能测试。图9 为原型机II 的干涉仪系统和光学头。

图8 Ophir 公司激光大气系统Fig.8 Laser measurement system for air motion parameters

图9 密歇根航宇公司原型机IIFig.9 Prototype II of Michigan Aerospace Corporation
国内针对激光大气运动参数测量技术的研究尚处于起步阶段,主要研究机构有航空工业凯天公司(AVIC Chengdu CAIC Electronics Co.,Ltd.,AVIC CAIC)和航空工业自控所(AVIC Xi′an Flight Automatic Control Research Institute,AVIC FACRI)。2015年,凯天公司完成基于米氏散射的激光空速测量原理样机,外型如图10 所示[21],在实验室测量圆盘线速度,测速精度0.75%。2016年,该样机完成标准风洞实验验证,系统测风精度为0.22 m/s[22]。2018年,完成三轴激光空速测量原理样机,如图11 所示[23],该系统使用1.5 μm 激光器,测量飞机外30 m 区域空气,其最大测量速度达450 km/h,真空速探测精度优于±1 km/h,利用搭建的三轴激光空速样机进行地面跑车试验,并与传统的空速管数据进行对比,验证了该系统的有效性和可靠性。自控所2017年开始跟踪调研光学大气数据系统,2020年对光学大气数据系统数据反演精度进行了仿真分析,并利用其实验室样机对仿真结果进行了验证[9],实验室样机如图12 所示。目前已完成了三轴激光空速测量技术的原理样机研制、跑车试验验证等工作,样机测量结果与校准用空速管的数据吻合度很高,空速测量精度小于0.5 m/s,如图13 所示。此外,为了提高系统信噪比,对相干探测系统最佳本振光功率测量方法进行了研究[24]。
图10 凯天实验室样机Fig.10 Experimental prototype of AVIC CAIC

图11 凯天三轴空速测量样机Fig.11 Airspeed measurement prototype of AVIC CAIC

图12 自控所的实验室样机Fig.12 Experimental prototype of AVIC FACRI
图13 自控所的三轴空速测量样机Fig.13 Airspeed measurement prototype of AVIC FACRI
2.2 传统大气数据系统的飞行校准
传统大气数据系统由于其非线性测量原理以及测量区域受到飞机机体或旋翼干扰,导致其空速、迎角、侧滑角等测量误差大,通常要经过复杂且漫长的飞行校准才能正常使用。空速校准[25]常用的方法有拖锥法、雷达法、总静压支杆法、飞越塔台法、标准机伴飞法等。图14 为采用拖锥法校准空速。迎角及侧滑角校准[26]通常有定常水平直线法、定常侧滑法、航向航迹法、静压差值法等。上述方法均具有操作过程复杂、试验周期长、飞行架次多、成本高、误差大等缺点。

图14 拖锥法校准空速Fig.14 Drag cone method for airspeed calibration
激光大气运动参数测量系统能够提供高精度真空速、迎角、侧滑角等大气数据,可用于全飞行包线内校准传统大气数据系统空速、迎角、侧滑角等参数的测量性能。美国、欧洲等已开展用于飞行校准传统大气数据系统的激光大气运动参数测量系统样机研制与飞行试验,表明激光大气参数系统可完全满足对传统大气数据系统的飞行校准的需求,具有校准操作简单、周期短、成本低、精度高的优点。1995年,Boeing 公司[27]研制基于1.064 μm 的Nd:YAG 固体激光器的单轴大气数据系统,用于大气运动参数的校准,激光功率0.5 W,测量飞机外1~2 m 区域大气,测速范围10~400 m/s,并在DC-8 上进行飞行试验,如图15 所示,最高飞行高度12 000 m,最大飞行速度926 km/h,空速测量精度1 m/s,同时对攻角和侧滑角进行了测量。1979年,法国Crouzet 公司[28-29]开始机载激光测速仪ALEV-1 的研究,利用10.6 μm 激光实现40 m 处空速测量,先后在美洲豹(Puma)直升机、小帆船(Caravelle)运输机、幻影(Mirage)III 战斗机上开展飞行测试,验证了其各飞行状态下的空速测量性能。随后ALEV-1 升级为ALEV-3,具备三轴测速能力,可同时获取三轴真空速、迎角和侧滑角。1991年起,ALEV3 在A320 原型机上开始测试,在A340 飞机首次完成对传统大气数据系统的校准。自此以后,有超过10 种新飞机型号通过该系统进行校准。截至2004年已累计进行超过1 000 h 的飞行测试。相比较传统的拖锥法、飞越塔台法、飞机伴飞法等校准方法,ALEV3 系统被证实具有很高的测量精度,仅需较少的飞行小时,可带来大幅的成本降低。从1991年开始,法国Thales 公司[28,30]先后开展了多个激光大气运动参数测量的项目研制。其最早研制基于10.6 μm 激光的大气数据校准系统,并成功在空客A340飞机上进行空速测量,测量范围10~400 m/s,空速精度0.25 m/s,数据更新率2~8 Hz。随后,受欧盟FP7 项目(2007~2013)的资助,在NESLIE 子项目中研制激光测速仪,系统采用1.5 μm 激光波长,同时测量三轴真空速、迎角及侧滑角,并与NLR 联合开展飞行试验,验证了该系统在不同大气状态、气象条件下的性能,图16 为飞行试验装置。在DANIELA 子项目中对上述系统进行了升级,2011年,联合NLR 进行了29架次的试飞,轨迹覆盖了从赤道到北极的16 个国家,旨在验证一切使用条件下的性能。受欧盟AIM2项目资助,2016年法国ONERA[31]在比亚乔P180 飞机成功完成了1.5 μm 激光大气运动参数测量系统的飞行试验,试验测量了三轴真空速、攻角和侧滑角,并与机载飞行测试仪数据进行对比,真空速误差小于1 m/s,攻角及侧滑角误差小于1°,图17 为飞行试验时的装置,该系统计划用于传统大气数据系统的飞行校准。

图15 DC-8 飞机及其实验吊舱Fig.15 DC-8 aircraft and its pod

图16 泰雷兹公司的飞行试验装置Fig.16 Apparatus for flight test of Thales

图17 ONERA 的飞行试验装置Fig.17 Apparatus for flight test of ONERA
此外,中国飞行试验研究院[26,28,32-33]在国内率先开展了激光大气运动参数测量技术应用于传统大气数据系统飞行校准的理论以及试验研究,同时开展了该技术对民机适航的影响研究,取得了一定的成果。
2.3 飞机前方风切变、湍流的探测
低空风切变、大气湍流等非定常大气扰动现象严重影响了飞机飞行品质、乘坐品质和飞行安全。据中国民航局统计[34],1949~2005年,由于大气扰动及伴随的恶劣天气造成的飞行事故占总事故的30%以上。据美国联邦航空局(FAA)统计,在1960~2000年,由大气扰动直接导致或间接影响的飞行事故比例为41%。此外,飞机起飞离场和进场着陆时间虽只占总飞行时间的5%,但有48%的飞行事故发生在该阶段。这其中,由于低空风切变造成机组情境意识缺失及判断操作失误的约占该阶段事故的66%。风切变示意图见图18。
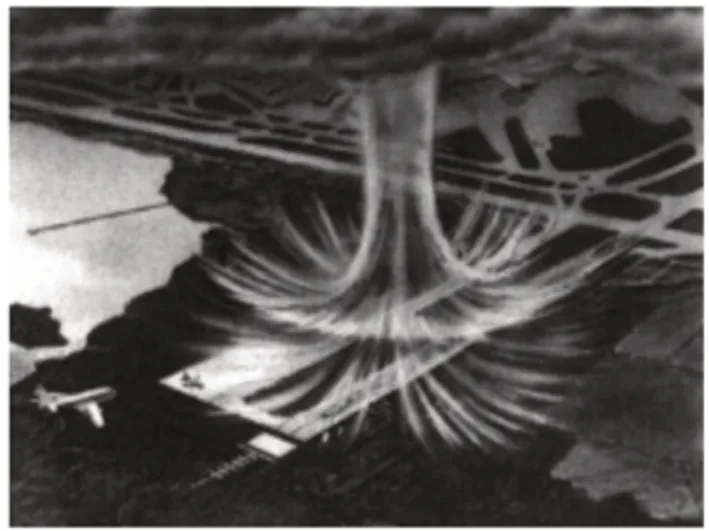
图18 风切变示意图Fig.18 Diagram of wind shear
风切变常发生在起飞和降落阶段,持续时间短,难以捕捉,检测方式一般分为前视式及反应式两种。前视式风切变探测利用气象雷达对前方航路上的风切变进行探测,可以提前30~70 s告警,提示飞行员绕飞规避。反应式风切变通常利用飞机机载近地警告系统(Ground Proximity Warning System,GPWS)、地形感知告警系统(Terrain Awareness and Warning System,TAWS)或飞行增稳计算机(Flight Augmentation Computer,FAC)进行检测和判断,能够在飞机进入风切变风场时提供适当的告警,提示飞行员进行改出或逃离操纵。而在人工操纵改出方面,虽然经过多年的研究,且FAA[35]推荐了Pitch-Guidance、Dive-Guidance、Altitude-Guidance 3 种典型的纵向改出策略,但并不是每次穿越风切变飞行都能成功改出。随着飞机对自身的安全性和自动化程度的需求不断提高,可以通过设计高可靠性的自动控制系统取代机组人工改出操作,降低人工操纵的复杂度和操作负荷。然而,通常的判断反应式风切变方法是在飞机已经处于风切变风场中,利用飞机运动参数(如高度、指示空速、对地速度、俯仰角、航向角等)的变化程度判断飞机是否进入风切变区域,该方法是粗略的且滞后的被动式探测,其改出策略有明显的延迟,严重影响改出成功率和控制品质。激光大气运动参数测量系统可以测量飞机前方30~120 m 左右区域的风速及风向,通过一定的算法可以分析出飞机前方是否存在风切变等,是精确的、超前的主动式探测,可据此设计前馈控制策略,实现反应式风切变的自动安全改出。此外该技术还可探测大气湍流,用于前馈控制,主动抵消湍流的影响,提高飞行及乘坐品质。
目前国外针对大气湍流、风切变探测等已开展了多个研制项目,并取得了一定的成果。2011年,美国NCAR[36]在“湾流”V 型公务机上成功试验了其研制的基于1.5 μm 激光的大气运动传感器,激光探测飞机前方30 m 区域,飞行最大时速720 km/h,在飞行速度小于200 m/s 时实现空速测量精度小于1 m/s,且对单个机翼吊舱向外发射多角度光束的三维风速测量方法进行了设计和讨论,该系统计划用于大气湍流的研究,图19 为试验的原理样机。OADS 公司经过多次产品升级及试飞测试,已形成可商用的产品WindSceptor,该产品可用于飞机前方大气湍流探测。受欧盟FP5 AWIATOR 项目资助,EADS 创新工厂[37-38]研制用于探测飞机前方阵风、湍流的短脉冲紫外激光测量系统,该系统采用355 nm 激光,采用基于FP 标准具的条纹检测方案进行鉴频,用于探测飞机前方35~50 m 的大气湍流等。2007年,报道了其第一阶段研究成果,其研制的机载湍流传感器在DLR 的ATTAS 飞机上成功完成了多架次的飞行试验,飞行高度7 315 m,最大飞行速度240 节(444 km/h),风速测量精度小于1.6 m/s,并试验了雨、密云、晴空等多种气象条件下的测量性能。2010年,在原有系统上增加了针对飞机前方湍流的自动前馈控制功能,并成功在A340-300 飞机上完成了测试,图20 是飞行试验时的其原理样机。受欧盟FP7 项目(DELICAT 子项目)的资助,2016年,DLR[39]研制基于355 nm 紫外激光的风速计,用于测量飞机前方大气的晴空湍流,并与NLR 联合开展了飞行试验,图21 为飞行试验装置。
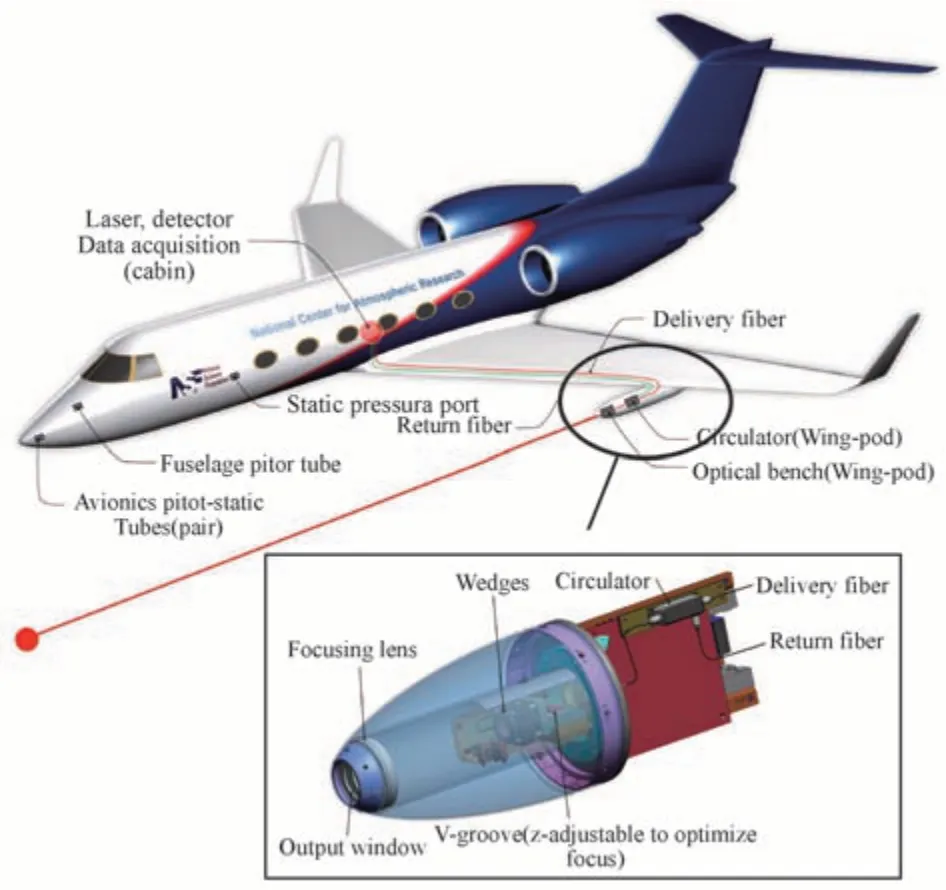
图19 美国国家大气中心的试验样机Fig.19 The experimental prototype of NCAR

图20 EADS 紫外湍流传感器样机Fig.20 Ultraviolet turbulence sensor prototype of EADS

图21 DLR 紫外激光风速计Fig.21 Ultraviolet anemometer of DLR
表2 对比了上述各研究机构的激光大气运动参数测量系统的部分性能指标。
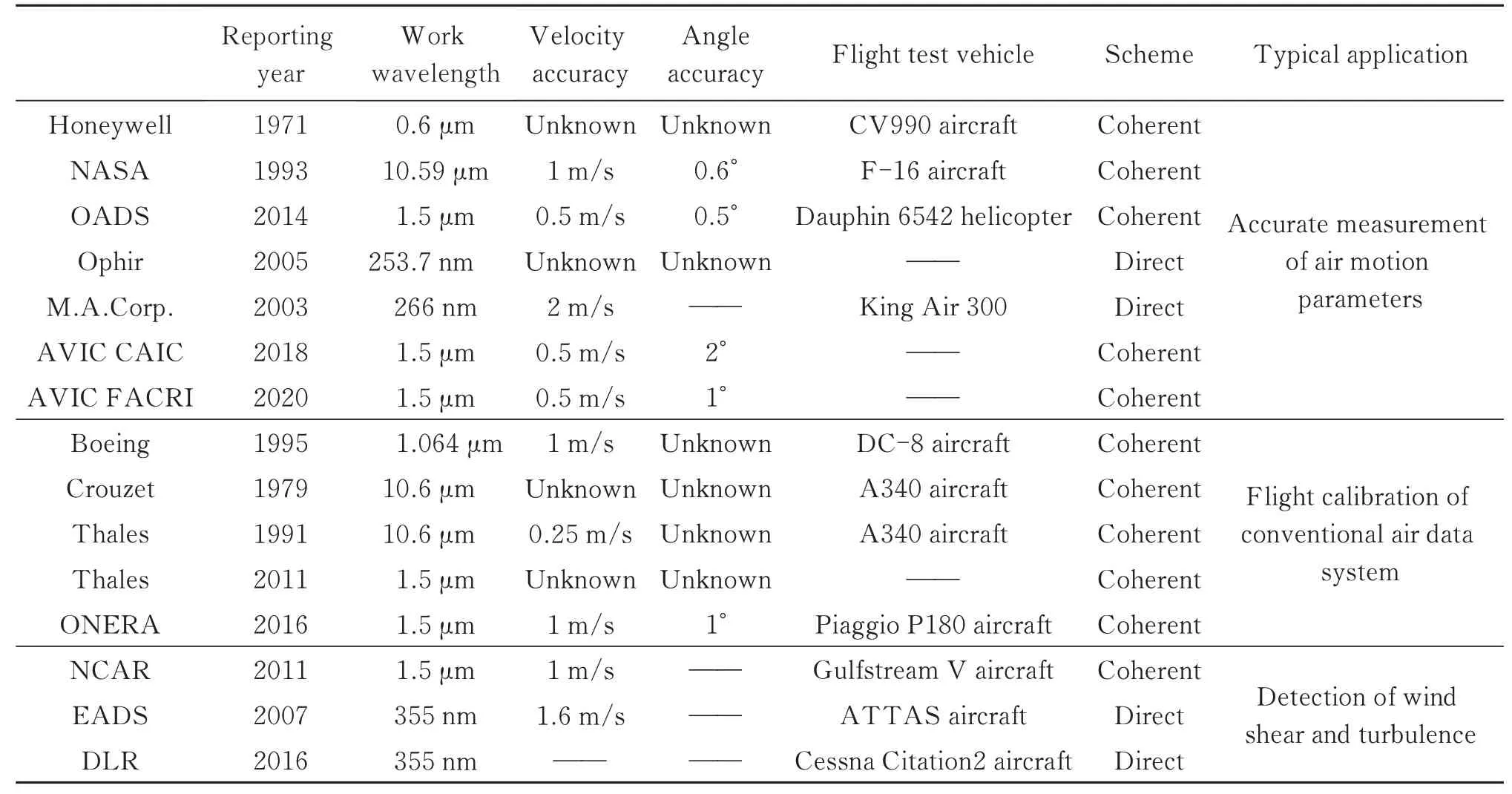
表2 已报道的激光大气运动参数测量系统部分性能指标Table 2 Partial performance of reported laser systems for air motion parameters
3 展望
随着激光技术的快速发展以及机载应用的迫切需求,近年来,激光大气运动参数测量技术也得到了较快的发展。本文综述了激光大气运动参数测量技术的原理、实现方案以及近年来的相关应用情况。从国外发展来看,激光大气运动参数测量技术发展相对成熟,已开发出多种样机或产品,并经历了很多次飞行试验,积累了大量试验数据及研制经验。而反观国内,该项技术仍处于跟踪研究阶段,技术方案、技术成熟度以及应用领域仍有很大的提升空间。
面向未来的机载应用,激光大气运动参数测量系统正向小型化、轻重量、低功耗方向发展。相比直接探测方案,相干探测方案具有体积及功耗小、成本低、测量精度高等优点,符合机载对体积、重量及功耗(Size Weight and Power,SWaP)的要求,一直是国内外研究的热点技术。相干探测方案目前仍存在两大技术短板:1)在高空时由于气溶胶浓度降低,使得探测性能和可靠性变差;2)不能实现大气温度、大气密度等参数测量。随着激光放大技术以及信号处理技术的进步[40],有望实现高空下气溶胶浓度低的情况下的大气运动参数的稳定可靠探测。而大气温度及密度的探测需借助其他激光测量手段实现,如转动拉曼测温技术[41]、瑞利散射测温技术等。由于1.5 μm 相比2 μm 激光的人眼安全阈值高一个数量级,且1.5 μm 易实现全光纤方案从而提高光路连接可靠性和调整灵活性,因此1.5 μm 激光的全光纤光路相干探测方案将成为主流研制方案。而对于直接探测方案,由于所采用的激光器、光学收发镜头、鉴频器等体积、重量及功耗均较大,使得采用直接探测方案的系统体积、重量、功耗较机载应用要求还有很大差距。因此,直接探测方案短期难以实现机载应用,应针对机载应用开展低SWaP 设计。此外,为实现激光频率锁定、更陡峭的透射边缘以达到更高的测量精度及灵敏度,对光学鉴频器的稳定性和精细度等提出了很高的要求。而目前鉴频器的技术复杂、实现难度大且成本高、环境适应性差,未来机载应用应着重解决该问题。
无论是直接探测方案还是相干探测方案,均存在浓雾、扬尘、大雨、大雪等极端天气对光信号的强烈衰减而导致接收到的散射信号微弱,进而造成大气运动参数无法准确可靠测量的问题。因此,如何进一步提高系统探测信噪比和灵敏度,实现高可靠且持续稳定的数据测量,是未来机载应用面临的一大难题。美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)指出[42]光子探测性能进一步提升只能依靠增加其量子态的调控,从而增大单光子比特的信息量,通过对调制的量子态的检测,可极大地压制背景噪声及系统基底噪声,突破量子噪声极限,提高微弱光子探测的灵敏度。因此实现云雾沙尘等复杂气象条件下的大气运动参数高可靠探测,必须采用光量子探测技术。目前,已有多篇文献报道将光量子技术应用于量子激光雷达的试验中,并获得了低于量子噪声极限的测量灵敏度[42-48]。激光大气运动参数测量技术可借鉴单光子探测、干涉式量子雷达、接收端量子增强雷达以及量子照明雷达相关技术,提高微弱信号的超灵敏检测能力。其中单光子探测技术具有单光子级探测灵敏度,可极大的提高极微弱信号的探测能力,与现有方案兼容性较好且技术较成熟,未来应用潜力巨大。基于压缩态的接收端量子增强技术可在现有方案的基础上,采用量子技术改造其接收端,达到低于量子噪声极限的探测灵敏度,同时避免了大气传输对量子态的退化作用,具有较好的可实现性及应用前景,值得深入研究。
美国OADS 公司、Ophir 公司等经过多年的发展,已基本形成可装备应用的激光大气运动参数测量系统产品。欧盟通过FAME、FP5、FP7、AIM2 等项目的实施,有力推动了欧洲激光大气运动参数测量技术的发展,并形成了以Thales、ONERA、DLR、NLR 为中心的联合研究机构,具有丰富的数据积累和应用经验。鉴于我国在激光大气运动参数测量系统研制与应用方面与欧美国家存在一定距离,提出我国开展该类工作的几点建议:1)健壮产品产业链,研究针对机载应用的高能量激光器技术、光放大技术以及提高系统SWaP 性能的技术和器件,同时应注重降低成本;2)提早布局开展文中所述的高精度大气运动参数测量、传统大气数据系统的飞行校准以及飞机前方风切变、湍流探测的应用研究;3)开展该类技术在民用领域的适航技术研究;4)加强合作交流,加大人员、资金投入,国家应适时予以立项支持。
4 结论
随着技术的进步以及产品或样机技术成熟度的提高,激光大气运动参数测量系统有望装备应用于飞机大气运动参数精确测量、传统大气数据系统飞行校准、飞机前方风切变、湍流等探测领域。本文期望通过进一步明晰激光大气运动参数测量技术的原理、应用现状和发展趋势,为从事激光大气运动参数测量和应用研究的相关技术人员提供有益的参考,推动激光大气运动参数测量技术的研究及产品工程化应用。
猜你喜欢
走向世界(2022年18期)2022-05-17
现代仪器与医疗(2022年1期)2022-04-19
百科探秘·航空航天(2020年8期)2020-07-29
看世界(2017年18期)2017-09-22
现代经济信息(2016年30期)2017-03-08
软件(2016年5期)2016-08-30
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
儿童故事画报·智力大王(2016年3期)2016-05-05
科技与创新(2015年13期)2015-07-03
小哥白尼·军事科学画报(2009年6期)2009-02-03
