飞行模拟装备仿真仪表的控制
2022-05-11 21:55宋慧营
今日自动化 2022年3期
宋慧营

[摘 要]文章针对飞行模拟装备仿真仪表的控制进行研究,设计了基本的步进电机式仿真仪表的控制电路,控制信号由PIC单片机提供,实现了仪表基本的正反转、调速、指针回零位等控制。在基本控制电路基础上进行优化,即可达到实际装备的控制要求。
[关键词]仿真仪表;飞行装备;步进电机;单片机;控制
[中图分类号]TP391 [文献标志码]A [文章编号]2095–6487(2022)03–00–03
Control of Simulation Instruments of Flight Simulation Equipment
Song Hui-ying
[Abstract]This paper studies the control of the simulation instrument of flight simulation equipment, designs the control circuit of the basic stepping motor type simulation instrument, the control signal is provided by the PIC microcontroller, and realizes the basic forward and reverse rotation, speed regulation and pointer return of the instrument. Bit control. Optimizing on the basis of the basic control circuit can meet the control requirements of the actual equipment.
[Keywords]simulation instrument; flight equipment; stepping motor; single chip computer; control
随着技术的进行与军事训练需求的变化,飞行模拟装备近年来得到了迅速发展。在飞行模拟器装备中,作为重要组成部分之一,仿真仪表是飞机模拟器飞行性能参数等关键数据的显示界面,作用是提供给飞行员座舱内的相关信息,以便飞行员做出正确的判断及开展下一步的操作,其功能优劣直接影响飞行模拟装备的作用与效果。飞行模拟装备仪表中多数属于仿真仪表,如何有效控制是仿真仪表的关键。对于仿真仪表,既要求控制其运行速度,又要求控制其运行方向、运行精度及运行完毕做好起始零位控制等。由于步进电动机具有精度高、机械结构简单、控制信号容易通过单片机等优点,因此在飞行模拟装备仿真仪表控制系统中,步进电动机式仿真仪表应用越来越广泛。
1 步进电机原理及单片机特点
带动仿真仪表指针运行,完成仪表控制任务的步进电机是一种由脉冲信号控制的电机,仪表指针与电机转子固定在一起作同步运行,要想达到仪表控制,完成电机转子的同步驱动控制即可。
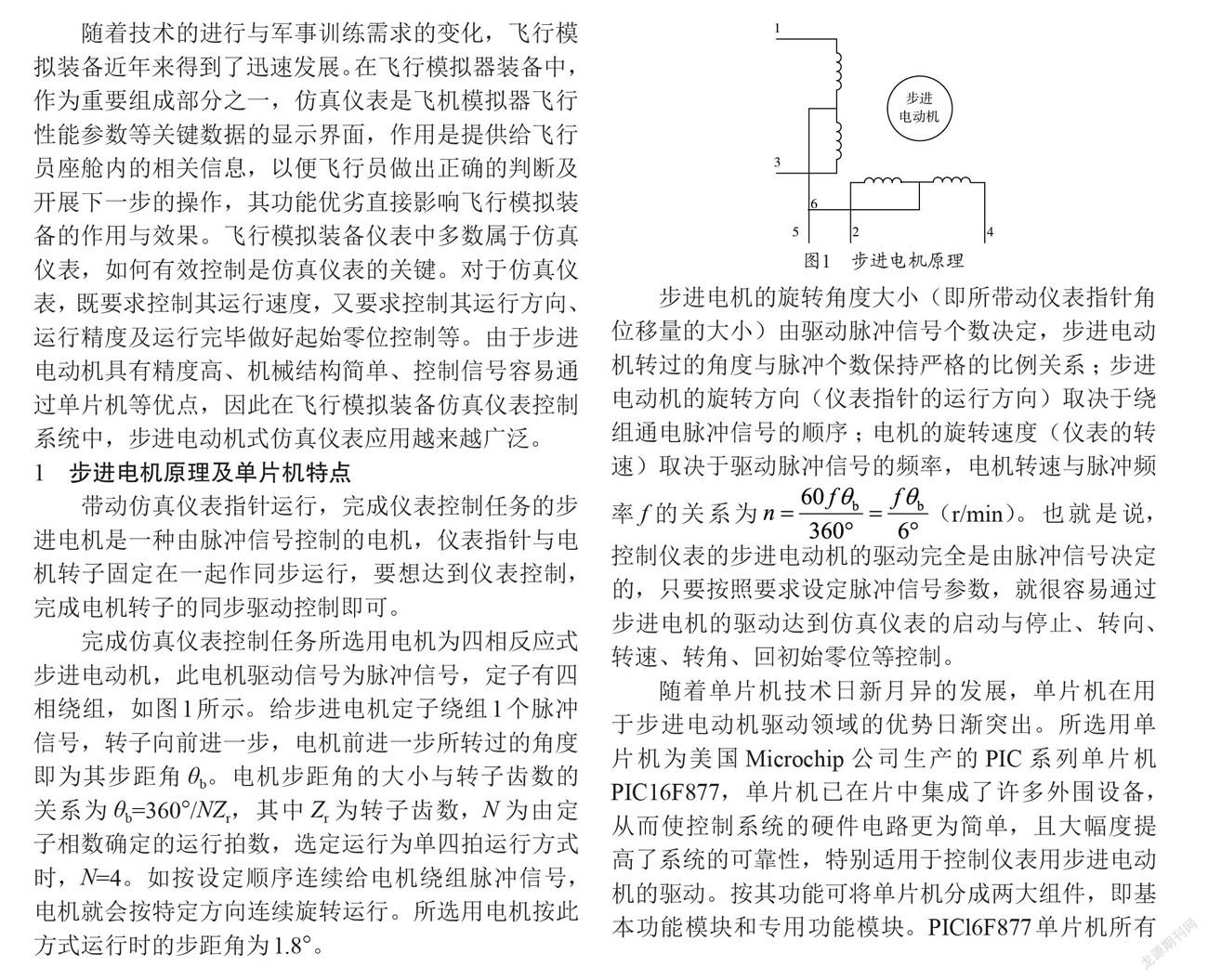
完成仿真仪表控制任务所选用电机为四相反应式步进电动机,此电机驱动信号为脉冲信号,定子有四相绕组,如图1所示。给步进电机定子绕组1个脉冲信号,转子向前进一步,电机前进一步所转过的角度即为其步距角θb。电机步距角的大小与转子齿数的关系为θb=360°/NZr,其中Zr为转子齿数,N为由定子相数确定的运行拍数,选定运行为单四拍运行方式时,N=4。如按设定顺序连续给电机绕组脉冲信号,电机就会按特定方向连续旋转运行。所选用电机按此方式运行时的步距角为1.8°。
步进电机的旋转角度大小(即所带动仪表指针角位移量的大小)由驱动脉冲信号个数决定,步进电动机转过的角度与脉冲个数保持严格的比例关系;步进电动机的旋转方向(仪表指针的运行方向)取决于绕组通电脉冲信号的顺序;电机的旋转速度(仪表的转速)取决于驱动脉冲信号的频率,电机转速与脉冲频率f的关系为 (r/min)。也就是说,控制仪表的步进电动机的驱动完全是由脉冲信号决定的,只要按照要求设定脉冲信号参数,就很容易通过步进电机的驱动达到仿真仪表的启动与停止、转向、转速、转角、回初始零位等控制。
随着单片机技术日新月异的发展,单片机在用于步进电动机驱动领域的优势日渐突出。所选用单片机为美国Microchip公司生产的PIC系列单片机PIC16F877,单片机已在片中集成了许多外围设备,從而使控制系统的硬件电路更为简单,且大幅度提高了系统的可靠性,特别适用于控制仪表用步进电动机的驱动。按其功能可将单片机分成两大组件,即基本功能模块和专用功能模块。PICl6F877单片机所有端口引脚采用引脚复用技术,以便增加功能而又不增大体积和引脚数量。系统配置引脚包括电源和接地引脚、时钟,复位引脚和主复位引脚。输入/输出功能引脚分布在PORTA、PORTB、PORTC、PORTD和PORTE5个双向输入/输出端口。PORTB端口的RB3、RB6和RB7引脚被MPLAB-IDE集成开发环境所借用,是低压编程功能引脚。由于此类单片机强大的功能、高可靠性及多输入/输出端口,使用1个单片机即可完成多个仪表的控制任务。
2 步进电机式仿真仪表的基本电路设计与程序设计
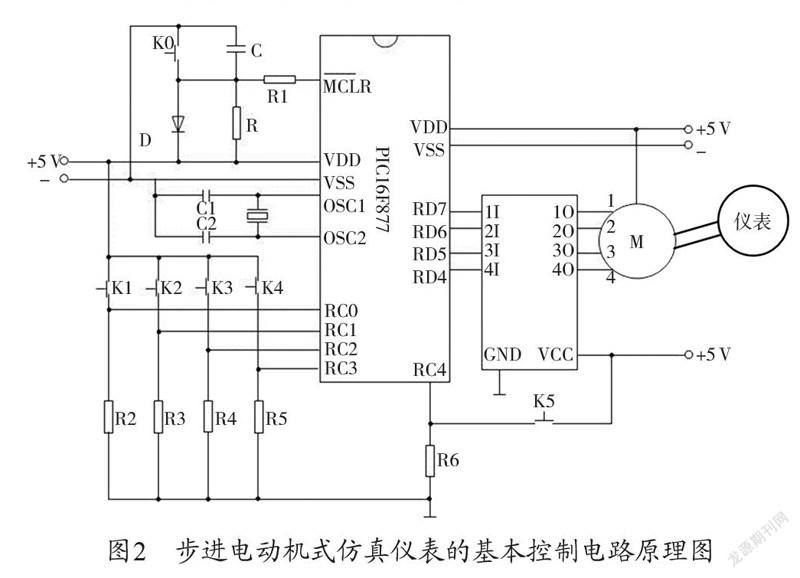
步进电机式仿真仪表的控制系统硬件主要包括PIC16F877单片机、步进电动机、驱动电源和反相器等部分。在电路中,单片机、反相器和步进电机共用+5 V驱动电源;由单片机产生脉冲信号输入给反相器,输入高电平经反相器输出低电平,这样四相步进电动机中的某一相为低电平,另外三相输入状态为高阻态,步进电动机的公共端连接在驱动电源端。当某相绕组为低电平时,该相绕组接通,转子就会带动指针转过一个相应的步距角,按顺时钟方向运行时定子绕组励磁脉冲信号的顺序如表1所示。以输入信号控制单片机输出脉冲个数和方向,进而实现电机带动仪表指针的运行,以及实现仪表指针转角、转速和转向等的控制。
步进电机式仿真仪表的基本控制电路如图2所示。在设计的控制电路中,以PIC16F877作为处理器,时基振荡方式为标准的外接晶体振荡器振荡方式XT,将PORTC端口RC0~RC4作为输入引脚,将PORTD端口RD4~RD7作为输出引脚。所用石英晶体频率为4MHz。当RD4为高电平、RD5、RD6、RD7为低电平时,经ULN2003A反相,步进电机4端为0 V电压,1、2、3端为高阻状态,步进电机顺时针方向转过一个步距角的角位移。然后,RD5为高电平、RD4、RD6、RD7变为低电平,经ULN2003A反相,步进电机3端为0 V电压,1、2、4端为高阻状态,步进电机顺时针方向再转过1个步距度的角位移。依次类推,只需控制加在RD4至RD7引脚的脉冲信号,就可使步进电机产生相应角度运行,为此只要计算出脉冲个数即可达到角度旋转运行控制。在RD4至RD7引脚输出相反顺序的脉冲信号时,步进电机即为逆时针转动运行方式;RD4、RD5、RD6、RD7全为低电平时,电机停转,即仪表的指针固定在某个位置。调整RD4至RD7输出脉冲的频率可控制电机的转速,当要求实时性好时,可将脉冲频率调高。RC0、RC1、RC2、RC3分别控制步进电机4种工作模式,RC4控制指针停留位置,其优先级最高。以一种模式为例,RC0为高电平,指针顺时针转动工作模式,当RC4为高电平,指针保持在现有位置;当RC4变为低电平,指针继续转动至最大位置。若RC0变为低电平,指针逆时针回零位,当RC4为高电平,指针保持在现有位置;当RC4变为低电平,指针继续回零位。
步进电机的单片机控制程序流程简图如图3所示。程序由以下7个模块组成,变量常量定义模块:对单片机内所用的工作寄存器地址命名。向量复位模块:用来设置程序的首地址。主程序初始化模块:对单片机端口初始化,设置指针可以转动的最大角。循环检测模块:检测单片机端口状态,执行相应的工作模式。工作模块:对应步进电机速度与转向控制的4种工作模式。工作模式子程序模块:单片机上电后根据引脚状态进入一种工作模式,步进电机带动指针偏离零位转动,每走一步均要判断RC4引脚及在该工作模式下控制指针的引脚状态。若RC4为高电平,指针保持在现有位置。当RC4为低电平,控制指针的引脚为高电平,指针继续偏离零位;控制指针的引脚变为低电平,指针回零位。通用子程序模块:查表程序为输出端口提供脉冲;步进电机每走一步,通过延时程序增加适当的延时时间控制输入的脉冲频率,使指针达到最佳线性指示效果。
3 步进电动机式仿真仪表实际控制电路的优化
在实际仿真仪表的控制过程中,在基本控制电路基础上做了优化。如在单片机中使用C语言可以更容易地完成控制程序;在步进电机式仿真仪表的基本控制电路中,仪表每一步转过的角度是由电机的步距角决定的,要想在实际控制过程中能够实现更精准的指示与定位,可选用步距角達到分级(角度)更小的电机,也可采用步距角细分方式;可在软件程序基础上优化控制模式,实现电机整个运行过程不分方向,只有在运行过程全部完成后再进行指针回初始零位控制等;在基本电路基础上,仪表指针的控制是通过计算机给出脉冲个数驱动电机实现的,是1个开环控制系统,为达到更加准确的控制,也可加入检测模块,实现电机转角的检测,达到闭环控制。
4 结语
采用PIC单片机实现了对步进电机式飞行装备仿真仪表的控制,此方法机械结构与控制电路简单,转角控制精度高,在飞行模拟装备仿真仪表中应用广泛。由于PIC单片机自身突出的优点,以其作为核心处理器既经济又方便且能够进行程序的创建、编辑、汇编和调试,还能方便而灵活地实现程序的模拟运行,为进一步优化提供了便利;而步进电机的脉冲信号控制及转角的精确定位,即使开环控制也能达到高精度,使其在仪表控制中被广泛采用。
参考文献
[1] 李荣正.PIC单片机原理及应用[M].北京:航空航天大学出版社,2014.
[2] 石广范.PIC单片机原理与接口技术[M].哈尔滨:哈尔滨工业大学出版社,2012.
[3] 刘广顺.自动控制元件[M].北京:航空航天大学出版社,2016.
[4] 李发海.电机学[M].北京:科学出版社,2020.
[5] 王聪,曹征涛,赵显亮,等.飞行错觉模拟器系统软件的设计和实现[J].医疗卫生装备,2019,40(5):24-28,37.
[6] 苟永明.祝贺中国计算机自动测量与控制技术协会成立20周年协会报道之五《计算机测量与控制》的发展之路[J].计算机测量与控制,2011(7):6-8.
[7] 杨秉,杨健.基于OpenGL的临近空间飞艇飞行仿真可视化研究[C]//.全国第19届计算机技术与应用(CACIS)学术会议论文集(上册),2008:262-266.
猜你喜欢
科学家(2016年3期)2016-12-30
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年21期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年24期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
中国机械(2014年23期)2014-10-21
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26