矿用异步电机双闭环调速系统的仿真研究
2022-05-11 23:31陈思之
今日自动化 2022年3期
陈思之




[摘 要]异步电机由于其结构简单,价格便宜,使用维修方便等优点,在矿用领域得到了迅速的发展。文章介绍矿用异步电机的双闭环调速系统,使用MATLAB/SIMULINK搭建了异步电机双闭环调速系统的仿真模型,并对模型进行详细说明,仿真结果证明了本文方法的有效性和实用性。
[关键词]矿用异步电机;双闭环;MATLAB/SIMULINK;仿真模型
[中图分类号]TM343 [文献标志码]A [文章编号]2095–6487(2022)03–00–03
Simulation Research on Double Closed Loop Speed
Regulation System of Mine Asynchronous Motor
Chen Si-zhi
[Abstract]Because of its simple structure, low price and convenient use and maintenance, asynchronous motor has developed rapidly in the field of mining. This paper introduces the double closed-loop speed regulation system of mining asynchronous motor, and uses Matlab / Simulink to build the simulation model of the double closed-loop speed regulation system of mining asynchronous motor, and explains the model in detail. Simulation results show the effectiveness and practicability of the proposed method.
[Keywords]mining asynchronous motor; double closed loop; MATLAB/SIMULINK; simulation model
近年來,异步电机因其结构简单,价格便宜,使用维修方便等优点,在矿用领域得到了迅速的发展。其中,双闭环调速系统是矿用异步电机最常使用的调速系统。双闭环调速系统具有启动快速,调速灵敏,鲁棒性高等优势,是近年来研究的重点和热点。通过仿真模型的建立,可以大幅提升电机控制系统研发的效率,并显著降低成本。鉴于此,本文使用MATLAB/SIMULINK仿真软件搭建矿用异步电机的双闭环调速仿真模型,并对模型进行详细说明。
1 直流调速系统和交流调速系统
交流调速系统具有高可靠性和低成本的优势,使得近年来在矿山领域获得了比直流调速系统更为广泛的运用。直流调速系统可以对电机的转矩进行精确的控制,而在早期的交流变频调速中,只能控制电机的转速,而对力矩是无法做到精确控制的。其原因在于,直流调速的电枢和励磁不是耦合的,这样对电枢电流和励磁电流能够做到精确控制[1];而对于交流调速系统,电枢电流和励磁电流互相耦合,使得转矩无法做到精确控制。通过对交流电机的三相交流电流进行变换,变换成两相分别为直轴电流与交轴电流,可以对这两相电流进行控制从而进行调速,但是如何将直轴电流与交轴电流精确地解耦,使得交流电机中的励磁电流和电枢电流可以被精确控制,是近年来研究的热点问题[2]。
近年来,学者们提出了矢量控制的变频调速系统。其基本原理是将异步电机的定子电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流)分别加以控制,并同时控制两分量间的幅值。根据磁场定向原理,分别对异步电机的励磁电流和转矩电流进行控制,从而达到控制异步电机转矩的目的。
异步电动机矢量控制的基本思想是经过坐标变换可以等效成直流电机,那么,模仿直流电机的控制策略,得到直流电机的控制量,再经过相应的坐标反变换,就能够控制异步电机了。由于进行坐标变换的是电流(代表磁动势)的空间矢量,所以这样通过坐标变换实现的控制系统就称为矢量控制系统(Vector Control System,VC系统)。给定和反馈信号经过类似于直流调速系统所用的控制器,产生励磁电流的给定信号和电枢电流的给定信号,经过反旋转d-q变换得到和,再经过2/3变换得到、和。把这3个电流控制信号和由控制器得到的频率信号加到电流控制的变频器上,所输出的是异步电机调速所需的三相变频电流。
2 矿用异步电机的双闭环调速系统
2.1 总电路结构
使用MATLAB/SIMULINK仿真软件搭建异步电机双闭环控制的仿真模型,如图1所示。电机控制是封装模块,总电路主要包括三相整流器和三相逆变器等功率电路;三相感应电机、速度控制器、磁场定向控制器(F.O.C)和制动斩波器等驱动电路。左侧输入端有三相交流电源(A、B、C)、转速给定(SP)、负载转矩给定(Tm)。三相交流电源单相电压有效值为460 V,频率为60 Hz;转速给定在系统初始时为500 r/min,在时间为1 s时变为0;负载转矩给定初始值为0,0.5 s时阶跃变为792 N·m,到1.5 s时阶跃变为-792 N·m。电机控制模块输出经选择模块输出信号到示波器。异步电机的功率为200 HP,整个调速系统仿真包含磁场定向控制感应电机驱动模块(Field-Oriented Control Induction Motor Drive)、转速给定模块(Speed reference)、负载转矩给定模块(Load torque),电源为有效值460 V、60 Hz的三相交流电源;该电路使用专用电源系统库模块,它为带有制动斩波器的磁场定向控制(FOC)感应电机驱动器建模[3]。
2.2 电机控制模块内部结构
电机控制器(图2)是由逆变器和控制器两部分组成:逆变器接收电池输送过来的直流电电能,逆变成三相交流电给电机提供电源,控制器接受电机转速等信号反馈到测量仪器,当发生制动或者加速行为时,控制器控制变频器频率的升降,从而达到加速或者减速的目的。
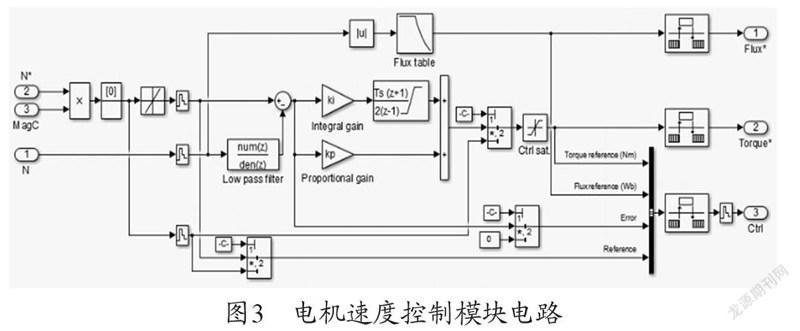
在此模块内,速度控制器(图3)基于PI调节器,对偏差信号进行PI控制,使实际转速趋向于给定转速。PI调节器的输出加到矢量控制模块的输入端,通过与给定的磁通和转矩值计算可求出三相电流给定值,并与实际电流比较,求出脉冲信号大小,控制开关器件的通断,从而控制电机定子输入电压大小,进而控制速度大小。
3 速度控制模块参数设置
3.1 原始参数及波形
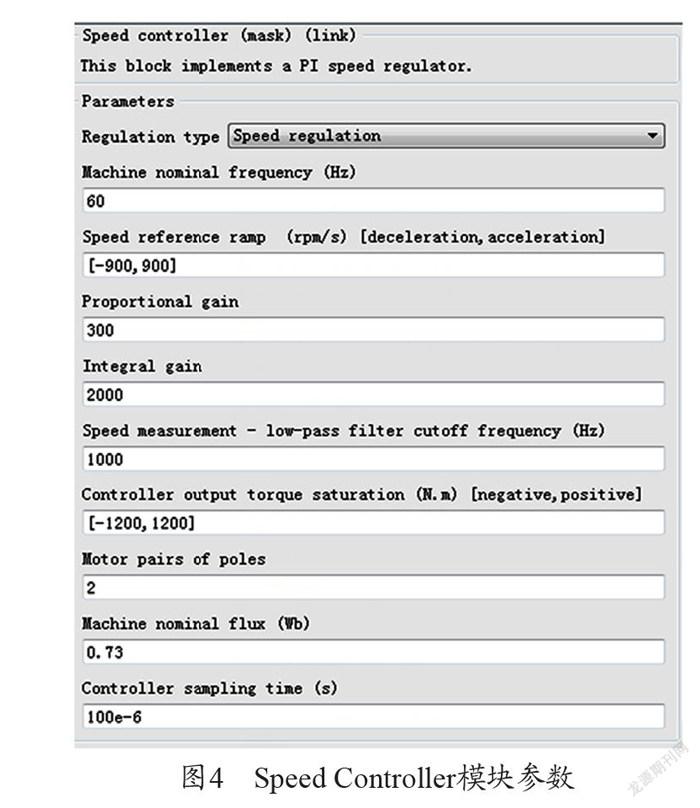
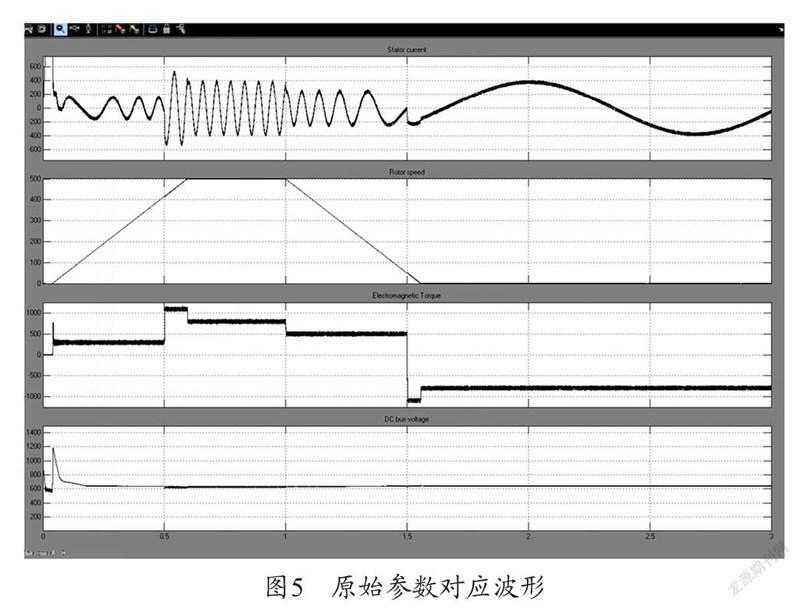
在本文的仿真模型中,可设置的参数为频率f、转速PI调节器的Ki和Kp、低通滤波器的截止频率、输出转矩的值、磁通值及采样时间等。若要改变电机转速和转矩,应在Speed reference和Load torque模块中修改,如图4所示。原始数据对应的仿真波形如图5所示。
3.2 Speed Controller参数设置及波形
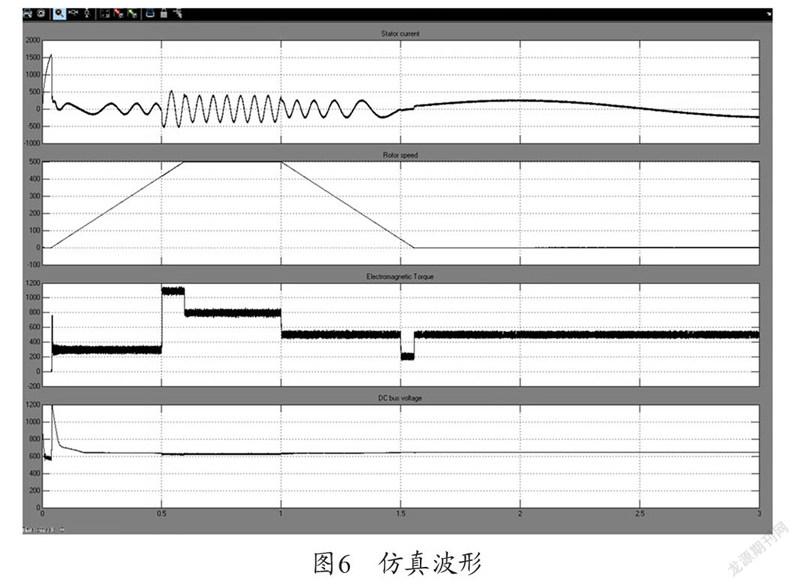
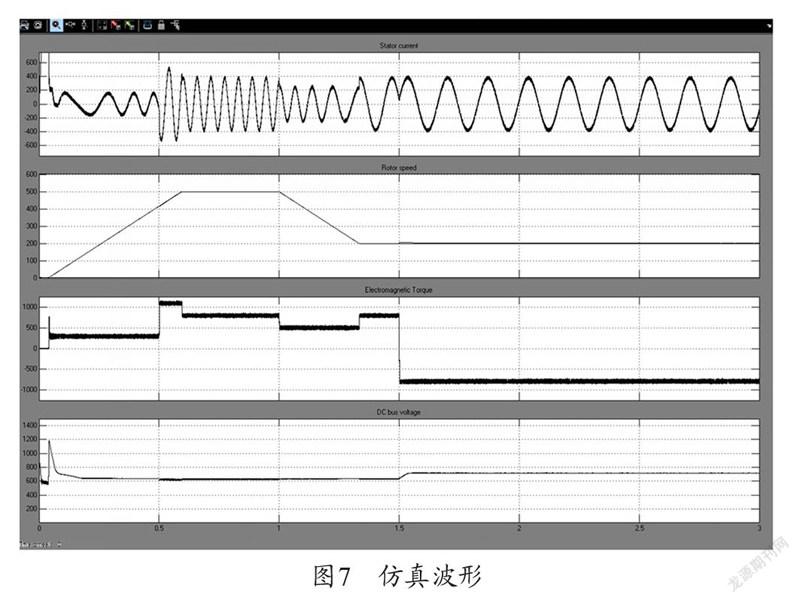
速度调节器通常采用PI控制,比例和积分参数的设置要根据系统的仿真结果不断地变化改动,以得到最稳定的输出特性以及动态特性。由于采用PI调节器构成了转速负反馈的无静差系统,在负载变化和电网电压波动等扰动情况下,保持系统的恒定输出。PI控制时,可将比例常数设为30,积分时间常数设为300,微分时间常数为0。仿真时,在Speed reference模块和Load torque模块中修改转矩值和转速值,当转矩指令由792 N·m变到500 N·m时,仿真波形如图6所示,当转速指令由500 r/min到200 r/min时,仿真波形如圖7所示。
利用转速调节器的饱和特性,使得系统保持恒定最大允许电流,在尽可能短的时间内建立转速,在退饱和实现速度的调节和实现系统的无静差特性。
当电机的加速度设置为[-1200,1200]时,转速波形如图8所示。
与原始参数波形对比可看出,图8中电机进入稳定运行状态所需时间减小。
当改变转速调节器的比例系数Kp分别为200、400时,仿真波形如图9所示。
Kp分别为200、400时,电磁转矩开始时峰值随Kp的增大而增大,但随Ki变化,波形几乎没有变化。
4 结束语
本文介绍了矿用异步电机的双闭环调速系统,并通过MATLAB的SIMULINK工具箱对其主电路和控制电路分别进行了建模和参数设置,最终建立了矿用异步电动机双闭环调速系统仿真模型,仿真结果证明了该模型的有效性和可行性。
参考文献
[1] 巨永锋,王晶,刘帜琦,等.基于模糊控制的直流调速系统仿真研究[J].现代电子技术,2021,44(1):98-100.
[2] 任林,宗剑,闫娜云,等.异步电机无速度传感器解耦矢量控制[J].电气传动,2020,50(9):15-19.
[3] 张厚升,于兰兰,杜钦君,等.发电厂用异步电机双闭环矢量控制系统研究[J].山东电力技术,2020,47(8):49-54.