智能一体化乒乓球陪练机器人结构设计
2022-05-11 23:31王辉姬美玲余见宋嘉林浩鹏
今日自动化 2022年3期
王辉 姬美玲 余见 宋嘉 林浩鹏



[摘 要]文章主要设计制造了一种多功能乒乓球发球机器人,創新性地采用变胞机构实现常规乒乓球发球机难以达到的墙角、墙边拾球功能。文中主要论述机器人的机械结构、工作方式及控制系统。机器人由四大系统即收球、运输、发球装置组成,动力系统以麦克纳姆轮作为主要动力元件。收球方式上,利用三叶板与挡板相结合,在不同情况下采用不同方式进行收球,可以做到特殊位置球的收集。发球方式的多样化由摩擦轮转速及升降平台共同决定,实现不同强度的训练。
[关键词]变胞机构;拾发一体;升降剪叉
[中图分类号]G846 [文献标志码]A [文章编号]2095–6487(2022)03–00–04
Structural Design of Intelligent Lntegrated Table Tennis Sparring Robot
Wang Hui,Ji Mei-ling,Yu Jian,Song Jia,Lin Hao-peng
[Abstract]This paper mainly designs and manufactures a multifunctional table tennis service robot. We innovatively use the metamorphic mechanism to complete the function of picking up the ball at the corner and the edge of the wall, which is difficult to achieve by conventional table tennis server. This paper mainly discusses the mechanical structure, working mode and control system of the robot. It is composed of four major systems, namely ball collection, transportation and service devices. The power system is made of Mecanum wheel as the main power element. In the way of collecting the ball, the combination of the three-blade plate and the baffle plate is used to collect the ball in different ways under different circumstances, so that the collection of the ball in a special position can be achieved. The diversification of serving methods is jointly determined by the rotational speed of the friction wheel and the lifting platform to achieve different intensities of training.
[Keywords]metamorphic mechanism; hair-picking integration; lifting scissors
1 概述
随着生活质量的日益提高,人们更加注重身体健康,因此对运动过程的体验提出了越来越高的要求,希望通过运动提高身体素质,放松心灵,同时也能缓解压力。随着乒乓球行业的发展,出现了不同类型的陪练机器人,一定程度上缓解了乒乓球训练面临的问题,但仍不够完善,因此我们希望能有1款智能一体化的机器人出现,可适应不同环境、不同强度、不同方式的训练方法。本文设计的自动捡乒乓球机器人,结构设计巧妙,方便使用,占地空间小,可以在机器人领域推广使用。
2 乒乓球机器人的市场调查研究
2.1 乒乓球机器人的市场调查
虽然目前国内市场上出现了一些拾球和发球机器人正在普及,有了一定的产品积累,能够在一定程度上实现一些发球和旋球及捡球功能,但是这些机器人的整体效率不高,而且一体化的程度不甚理想,很难将上述几种功能很好地融合在一起,图1所示的是常见的滚筒捡球机器人。
该产品为网上售卖的主流乒乓球捡球工具,利用滚筒缝隙弹性拾球,结构简单,轻巧灵敏,但是需要人工识别球同时需要人工配合完成拾球操作,效率相对低下,储存球量不多,而且只能拾球不能发球。
图2所示的产品为佩克特专业乒乓球发球机器人,内有球桌和智能发球机。其高效智能,但是制造成本较高,占地面积大,收放困难,占用资源较多。
2.2 乒乓球机器人的市场调查结果分析
由上图可知,现有拾发乒乓球机器主要存在以下问题:
(1)机器人效率低,占有面积大,功能不齐全。
(2)机器智能化不足,不能自主完成所有动作,需要人工的配合。
3 智能乒乓球陪练机器人的设计思路
根据上述描述,设计了一款既可以收集墙边、角落等位置的乒乓球,又可以发不同旋球的高度自动化的乒乓球机器人。该款机器人集拾球和发球功能于一体,其特点有:
(1)变胞机构的设计。巧妙的利用变胞机构实现不同功能,能在最大程度上把特殊位置的乒乓球(如墙角)收集,确保每一个乒乓球都能被收集。
(2)胶轮摩擦方式可实现发球方式的灵活多样,既能保证乒乓球发射的稳定性,又能极好地控制乒乓球的发射角度。
(3)实现智能化。本机器集收球、发球于一身,操作简单,占有面积小,具有强大的市场价值,值得推广。
(4)设计巧妙,功能多样,效率高,使用方便。
4 具体设计方案
4.1 动力装置
动力装置采用麦克纳姆轮(麦轮),这是1种可全方位移动的全向轮,由轮毂和辊子联合构成,基于这些与轮毂成角度的辊和机轮方向,麦轮可实现在任意方向上的运动而不改变机轮自身的运动方向。每个麦克纳姆轮单独由1个12 V电机驱动,运动灵敏,完美适应球馆内复杂的地形环境。
4.2 收集装置
此乒乓球机器人的收集装置采用三叶板与弧形挡板相结合的方式进行收球动作。
(1)由于乒乓球随意地散落在场馆内,故利用CMOS图像传感器搜集场中地面上的乒乓球,利用红外进行避障,配合麦克纳姆轮以运动。然后直流电机驱动三叶板进行转动,将乒乓球沿着预先设计好的弧形曲面拨进凹槽中,完成收集。
(2)市面上常见的乒乓球直径为40 mm,重2.7 g左右,根据均质球体在曲面上的运动状态,其在圆槽上的运动分为3种情况:纯滚动、纯滑动,半滚动半滑动。综合分析计算得到对应的弧形挡板设计弧度为半径R=200 mm。乒乓球收集分为正常情况和非正常情况。正常情况对应场地开阔,机器人正常进行上述工作。
在非正常情况即收集墙角乒乓球时,通过红外避障系统感知到墙体,将信号传给电机,电机将动力传至差速器,进而配合电磁制动器锁死的特性,将动力不同的配置组成变胞机构。差速器带动链条转动使得三叶板支撑轴旋转到上方合适位置,随后停止运动,形成速度差,使得锥齿轮传动部分开始运动,带动所述弧形挡板转动,从而将乒乓球收集到弧形挡板后方的收集槽内。实现了墙角等特殊位置乒乓球难以收集的问题。
4.3 运输装置
运输装置在整个机器中,起到承前启后的作用,即将从收集装置收集槽中收集到的乒乓球运送到发球装置。
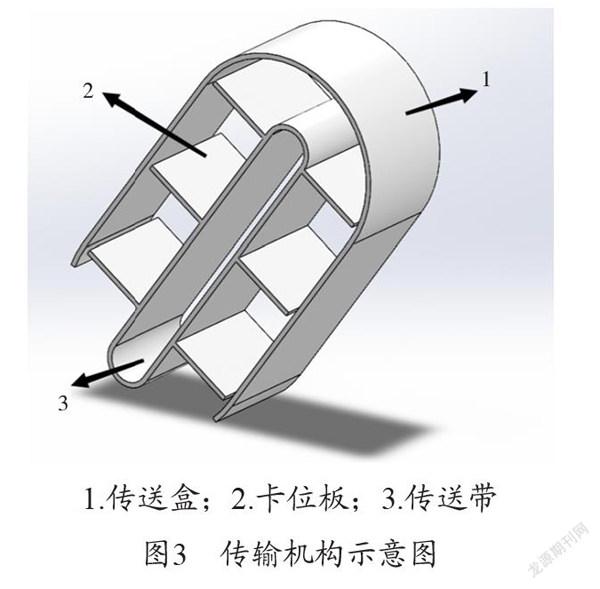
因收集槽后含有驱动装置等部件,故传输机构由传送盒构成,传送盒又包括卡位板和传送带,将乒乓球传送至后面的储球机构内,由输球机构将球推送到发射装置。
4.3.1 传输机构
传输机构如图3所示,传送带根据乒乓球直径设计为半径60 mm,有效避免了运输过程的卡顿现象。工作时由直流电机控制,乒乓球随着卡位板的转动而随之移动,将其运输到收容腔。
4.3.2 储球机构
储球装置主体为收容腔,收容腔内部表面呈现向后下倾斜的形式,末端两侧为弧形曲面,同弧形挡板R=200 mm,后端中间连同收容腔出口,乒乓球可在重力作用下无论在任何方位都能沿着光滑衔接的曲面滚落集中至收容腔出口。
4.3.3 输球机构
发球机构如图4所示,主要由齿轮、齿条、金属管组成。齿轮齿条构成的往复运动机构,内含2个完整不完整齿轮,3个完整齿轮,1个齿条,齿条上带有推动头部,导向片等,此推送装置由电机驱动,不断地将从收容腔落下的乒乓球推入管道,同时管道内设有橡胶圈,其目的是为防止乒乓球进入管道后又随重力返回收容腔出口。
考虑到机器人高度过高的情况,可能会出现乒乓球在桌下而机器人无法进入的情况,将金属管做成可伸缩式的管道,能沿着上下方向作伸缩运动,调整机器人整体高度,满足收集要求的同时,能够调节乒乓球的发射高度。管道末端为一端弯管,出口连接发球装置。
4.4 发球装置
4.4.1 升降机构
为完成不同的发球方式,创新设计一款剪叉机构,以便满足不同情况下的发球需求,同时可以在关机状态下尽可能降低其高度,减少空间占有。升降机构的主要原理为丝杠剪叉机构的工作原理,运行稳定而安全。
4.4.2 纵摆机构
纵摆机构,其主要作用是调节乒乓球发射时的上下角度,以此来控制乒乓球发射距离的远近。经计算,俯仰角度最大为40°,可满足绝大多数情况下的发球需要。纵摆机构由升降平台、支杆和双向丝杠构成,相比于常规丝杠,双向丝杠具有更好的安全性和工作性能。其螺纹部分两边正好相反,分别套1支杆,由舵机驱动,当丝杠向1个方向转动时,两支杆靠拢,反方向转动时,支杆分开。两支杆上连接支撑板,支杆运动,支撑板也跟着上下运动,实现了乒乓球发射角度的调节。
4.4.3 发射机构
此机器采用的发球方法是胶轮摩擦发球,相对 于气压式、锤击式发球机来说,胶轮摩擦发球最大 的优点是既能保证乒乓球发射的稳定性,又能极好 地控制乒乓球发射的角度和速度。
发球机构包括与金属管尾端弯管相连的镂空管道、两个摩擦胶轮以及用以驱动的电机。胶轮嵌入管道约3 mm,使得乒乓球在管内与胶轮摩擦,在摩擦力的作用下向外发射出去,同时,要实现连续的发球,且球速能够被调节,就要求两摩擦轮的转速可调节,因此形成速度差,发出左旋、右旋等球。
若设一摩擦轮的角速度为ω1,二摩擦轮的角速度为ω2,则当ω1=ω2=时,ν=d·ω1/2,发出的是不旋转的球。当ω1≠ω2时,ν=(ω1+ω2)·d/4,方向为转速高的轮的方向。
5 控制系统
乒乓球机器人的控制系统采用STM32主板作为主控制器,辅助以CMOS传感器寻找乒乓球,红外避障,电机作为驱动来进行收集乒乓球。乒乓球机器人是1个典型的智能实时系统,它涵盖机器人研究领域智能控制、高速视觉伺服、人机交互以及机器学习等一系列核心技术,研究乒乓球机器人,可以有效地推动机器人技术发展,具有较高的科研价值。
5.1 通过步进电机控制麦克纳姆轮实现机器人的运动
原理:通过PWM调整电机的转速,以间接调节小车的快慢。①搭建电机的硬件电路,STM32没有单独的PWM模块,它是利用定时器来输出PWM的,每个定时器有4个通道,需要找到定时器与这4个通道所接的引脚,再将这4个引脚接到电机驱动的输入端上。②搭建电机的软件电路,实现引脚与定时器的初始化,调用setcompare函数设置占空比,稳定机器人的速度。调用函数实现机器人的左转、右转、急停、直行等操作。
5.2 超声波测距模块控制舵机实现小车避障
测试距离=(高电平时间*声速(340M/S))/2。测距直接用调用Senor_Using()这个函数,函数的返回值即为距离。设计思路如下:
(1)舵机向前摆正,测量正前方的距离,如果距离小于30 cm就停下来。
(2)停下后,舵机检测左边45°和右边45°的距离,比较这两个距离。
(3)假如左边的距离比右边大,就用1个do-while循环,使舵机摆正不断测量前方距离,同时小车缓慢左转,一直转到前方距离大于30 cm,小车继续向前,循環继续。
4-3open-mv实现乒乓球的识别,从而调动电机去驱动三扇叶装置收集目标。
STM32单片机作为核心控制器,并协同机器视觉模块OpenMV组成智能小车系统,针对摄像头提取的道路图像信息,采用阈值法和鲁棒线形回归算法提取道路引导线,采用多重模板匹配法提取障碍物信息,并结合传统PID控制技术和模糊控制技术,实现了智能小车系统的引导线自动循迹和避障功能。
6 结束语
为了进行更有效的训练并减少人工人力成本,提高教练的训练质量,我们研发了此款机器人,对各种水平和各种类型的人群都具有很好的辅助性,市场前景广阔。装置一体化程度高,功能强大,效果较好,完全可以替代人工进行一部分训练项目,在一定程度上减少了人力成本。同时采用STM32开发板作为控制器,具有较强扩展性,方便后续优化。装置设计精巧,原理简单,操作简单且容易上手,经过简单培训即可完成所有操作任务。
参考文献
[1] 李小康,赵险峰,胡述祥,等,智能乒乓球陪练机器人结构设计[J].机械设计与制造工程,2020(11):71.