
吊放式深海潜标布放和回收过程数值分析
2022-05-13 16:22郑跃洲齐晓亮张仕华薛乃耀
广东造船 2022年2期
郑跃洲 齐晓亮 张仕华 薛乃耀
摘 要:深海潜标可用于长期连续地监测海洋环境,是海底观测网的无线固定网的组成部分。通过AQWA软件对采用吊放式的深海潜标进行时域模拟,考虑2000m水深的南海环境,以及波浪、海流的影响,模拟得到潜标布放和回收过程中设备和浮球的水平、垂向的位移和速度,以及缆绳张力等数据,为潜标的深海试验提供依据。
关键词:潜标系统;布放回收;AQWA
中图分类号:P 754 文献标识码:A
Numerical analysis of the Deployment and Recycling Process of Hanging Deep-sea Buoy
ZHENG Yuezhou QI Xiaoliang ZHANG Shihua XUE Naiyao
( 1. College of Civil and Transportation Engineering, South China University of Technology, Guangzhou 510640;
2. CIMC Offshore Co .Ltd , Shenzhen 518000)
Abstract:The deep-sea buoy can be used for long-term continuous monitoring of the marine environment, and it is also a component of the wireless fixed network of the seafloor observatory. The time domain simulation of the suspended deep-sea buoy is carried out through AQWA software. Considering the South China Sea environment at a water depth of 2000 meters, as well as the influence of waves and currents, the simulation obtains the level and vertical of the equipment and floating ball during the deployment and recycling of the buoy. Data such as displacement and velocity, as well as cable tension, provide the basis for deep-sea experiments.
Key words: Buoy system; Deployment and recycling; AQWA
1前言
深海蘊藏着非常丰富的各类资源,不仅包括石油资源,还有陆上稀缺的金属矿资源。海洋开发越来越受到各国重视,深海观测设备作为海洋探测以及资源开发利用的重要装备,已成为各国竞相研制建造的目标。我国已在东海和南海分别建立海底观测系统,以实现从海底向海面的全天候、实时和高分辨的立体综合监测,为深入认识东海和南海海洋环境提供观测试验平台[1]。
潜标常用于监测海洋水文、气象、海底地貌,具有较好的隐蔽性、稳定性,在军事领域上发挥着很大作用[2-3]。目前潜标也可作为海底观测网的固定节点,与海底主基站、AUV移动节点通过水声通信与无线组网技术,形成海底有缆观察网的无线拓展系统。
深海观测设备脱离母船的方式,分为:投放式;吊放式;抛弃式。吊放式是用母船上的A型架、吊臂等机械设备,将深海观测设备吊到海水中,当深海观测设备处于预定状态后才与母船脱离,或者不脱离母船直到深海观测设备完成任务回收。本文的潜标布放方式采用吊放式。
深海潜标的布放和回收一直是个难题,相关的研究不多。Chang ZY[4]分析了浮标系统布放时在静水和海流作用下的动力学特性;张洋[5]使用Orcaflex软件,进行了潜标系统在500m水深环境布放过程的时域仿真。
为了实现在2000m水深的南海恶劣环境下潜标布放和回收,对潜标系统作一定简化,分别建立水下布放和回收的水动力分析模型,进行频域和时域的计算,结合水动力计算结果,为海底观测网的深海试验提供数据支持和指导。
2深海试验系统
2.1 潜标
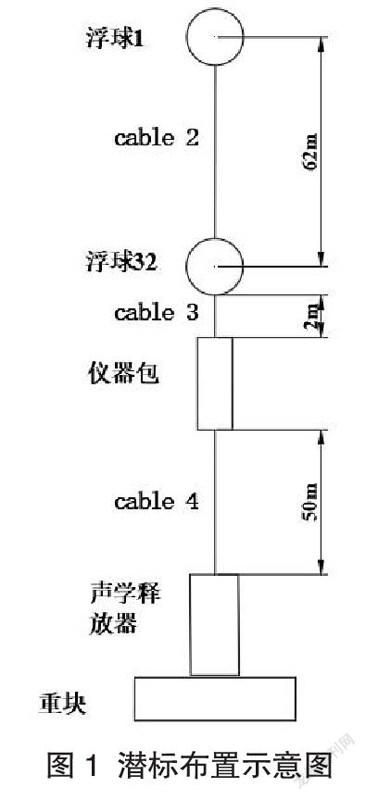
深海试验潜标,整套装置高约100~130m。先进锚系潜标:干重约2~2.5t,湿重约1t;设备包括水声通信机、CTD、单点海流计等传感器仪器包、连接承力组件、缆绳、电气承力缆、浮球和水泥块等。浮球数量为32个,浮球直径17英寸,球体净浮力26kg,空气中重量22.15kg;浮球在缆绳上的间距为2m;潜标布放时,标记最靠近绞车的浮球为浮球1,靠近仪器包的浮球为浮球32。
海试“向阳红31号”为大型浮标作业船,总长89m,垂线间长86m、型宽18m、型深7.2m、吃水4.8m、排水量3982t,最高航速≥16kn;配备DP-2动力定位。
2.2 环境参数
深海试验区位于神狐峡谷群的底部与珠江海谷的头部,地势较为平坦,由神狐峡谷群冲刷下来的沉积物在此堆积,形成较厚沉积物层。
进行深海试验布放和回收时域仿真时,波谱采用P-M谱,有义波高Hs=1.5m,跨零周期Tz=8.0s,海面流速为1.0m/s;随着深度增加,流速呈阶梯状减小,在靠近海底的500m水深范围,流速近似为0。
3 潜标水下布放和回收过程时域仿真
数值模拟中甲板以下部分的船体表面网格分布情况为:总网格数8641,水面以下网格数3554,并在水线面划分网格以消除不规则频率影响。
如图1所示:潜标由cable1~4、浮球1~32、仪器包、声学释放器和重块组成。其中,浮球、仪器包、声学释放器和重块特征尺度远小于波长,故将其作为莫里森单元进行建模;由于潜标的浮球过多且直径较小,为简便起见作近似处理,32个浮球只保留1和32两个,剩余浮球的质量和体积平均分布到cable2上。各构件的质量和浮力,如表1所列:
3.1 潜标布放
潜标布放前,应做好系流准备、仪器检查准备、投放前准备。采取先标后锚方法,即按照系统结构图先投放离海面最近的浮体,再按顺序投放系留、仪器设备、浮球及释放器等,最后投放锚。
投放起始点宜为顺流方向,距离观测站位投放点2倍至3倍系留长度位置;作业船应顶流开始作业,投放过程中船宜以1节的速度低速前进;可通过操作甲板单元对释放器进行三点测距,确定实际投放位置;作业完成后,海试船应在投放点附近漂泊观察是否水面有破断绳缆、浮球等漂浮物,若无则清理作业现场准备返航,若有则根据应急预案处置。
潜标的布放和回收,是通过Hydrodynamic Response中的Cable Winch模块实现:通过绞车可改变缆绳长度,其中与绞车相连的缆绳必须是线性的,绞车可在指定启动时间后按给定速度启动,当到达最终长度时停止;潜标布放和回收时,绞车的速度均为0.8m/s,但当绞车放长缆绳时,实际的速度会乘上系数1+ε/2,ε为应变。
AQWA可以生成一个模拟浮式结构在风、波和水流作用下的运动时间历程,这些浮式结构是可以由关节或系泊索任意连接的;结构的位置和速度,是通过在时域中积分这些力引起的加速度来确定的。时域整体运动方程为:
MA=Ft
式中:M为组装后的结构和附加质量矩阵;A为加速度矢量;Ft为总作用力的矢量。
吊点位于船后5m处。将绞车缆定义为cable1;浮球1与绞车缆相连,浮球1与浮球32之间的缆绳,定义为cable2;浮球32与仪器包相连,其缆绳定义为cable3;仪器包和声学释放器相连的缆绳,定义为cable4。
潜标在下放过程中,浮球1、浮球32、仪器包及水泥重块的水平位置随时间变化曲线,如图2所示,其深度变化曲线如图3所示。
数值模拟中假设吊点位于船尾后-5m处。由于流的作用,浮球、仪器包和水泥重块水平方向的位置开始时偏离-5m位置,随着深度增加流作用减弱,潜标水平方向位置在-5m附近振荡。
设置的波浪沿安装船的船尾方向传播,来流方向与波向相同;试验船和潜标系统受到波浪和海流的共同作用,水面附近有较大的流速,海底附近流速几乎为零;随着布放深度的加大,潜标在布放过程中,水平方向的位置先远离吊点位置沿流及波浪传播方向移动,随着布放深度继续增加又回到船舶吊点附近。
潜标1在下放过程中,浮球1、浮球32、仪器包及水泥重块水平速度、垂向速度和缆绳张力,随时间变化曲线如图4~图6所示。
潜标的浮球1位于最上面,完全入水布放时受到的波浪和海流的影响最大,可在图4中看出浮球1 的水平速度变化最大;潜标在布放过程中,通过A架直接下放,与释放器相连的缆绳张力较小,浮球与设备相连的缆绳具有较大的张力值。
3.2 潜标回收
潜标的回收步骤,主要包括:系统释放;系统搜寻;打捞回收;数据下载;整理记录等。回收前应做好以下准备工作:
- 召集所有作业人员参加回收作业协调会, 明确作业方案、实施步骤、岗位责任、安全措施和注意事项;
- 准备甲板单元和释放器释放码;
- 准备工作小艇,并进行工作状态检查;
- 检查吊车、绞盘等运行是否正常;
- 准备打捞抓钩等专用工具。
作业船抵达投放点附近,通过释放器甲板单元与潜标系统上的释放器的水下换能器,建立声学通信,并发出释放信号;作业船停车,防止潜标上浮过程中进入螺旋桨;回收过程中,用绞车与吊机配合,将待回收的仪器、锚系提升到甲板以上适当位置,刹住绞车;用缆绳或抓钩固定住系留,防止系留下滑;正向启动绞车,使张力落到固定缆绳上,然后卸下连接卸扣和仪器。
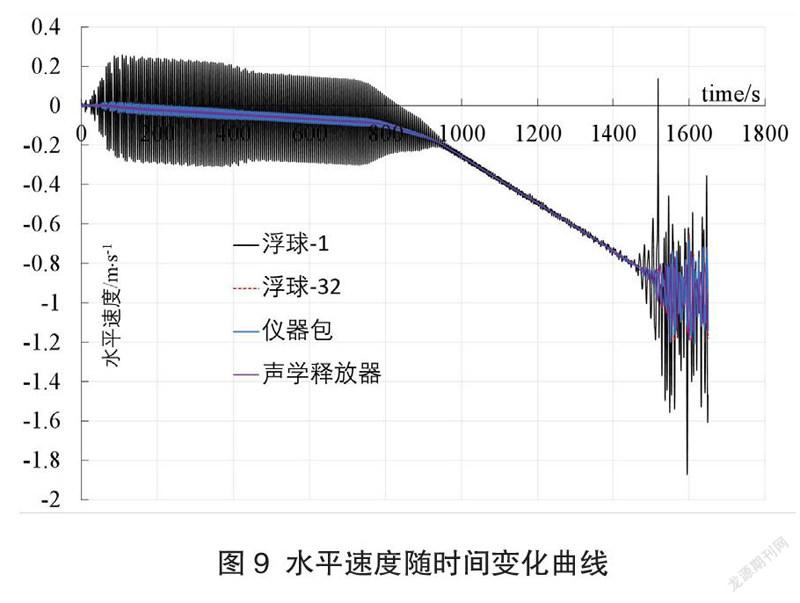
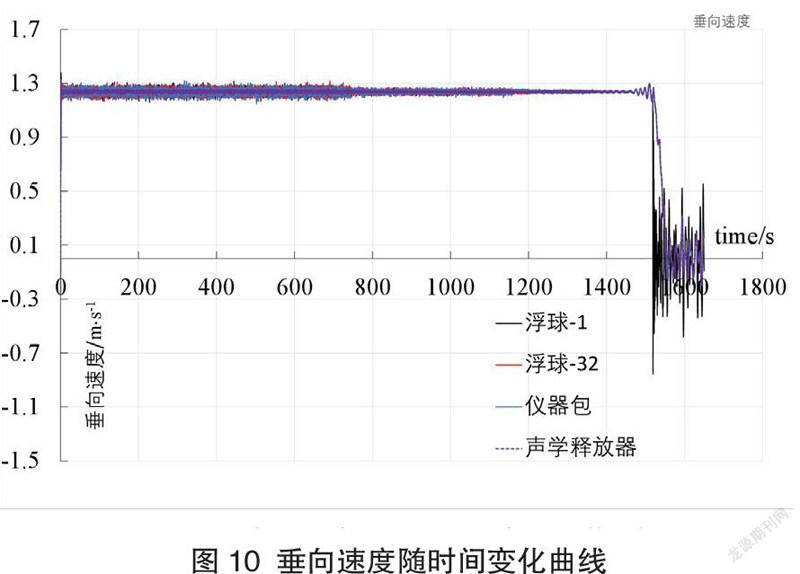
潜标回收的数值模拟,主要是模拟潜标在未出海面前的上浮过程。潜标回收过程中,浮球和仪器包的空间位置、速度和缆绳张力,如图7~图11所示:
在回收过程中,浮力大于重力,各浮球及设备初始阶段作加速运动,直到向上的浮力与向下的重力及阻力值达到平衡时,在无海流作用的海域中可匀速上浮,此时上浮速度很快稳定在2.7m/s左右;潜标在上浮回收过程中,受流力作用,水平面上沿流的方向逐渐偏离安装位置对应的坐标值,从2000m水深处上浮到海面大约需12分钟;回收过程中,浮球32相连的缆绳受到张力最大。
4结论
深海试验潜标在布放及回收过程中,海试船的吊点位置会随时间波动,海流的流速和方向会随水深而变化,波浪也会随时间波动,所以试验设备在布放过程中的位置、速度、缆绳张力,均会随时间呈现出波动。
潜标在布放过程中,浮球与设备相连的缆绳具有较大的张力值;在回收过程中,相对于其它缆绳段,浮球与设备相连的缆绳同样具有相对较大的张力值;在回收阶段,潜标依靠浮球产生的净浮力产生上浮,对应缆绳的最大张力值小于布放过程中缆绳的最大张力值,因此深海试验时需要重视在潜标布放时浮球与缆绳的连接。
参考文献
[1]陈建冬, 张达, 王潇,等. 海底观测网发展现状及趋势研究[J]. 海洋技术, 2019, 038(006):95-103.
[2] 王明午. 海洋潜标系统的静力分析和姿态计算[J]. 海洋技术, 2001, 20(004):41-47.
[3] 王婷. 国外海洋潜标系统的发展[C]. 2011年全国水声学学术会议论文集. 2011.
[4] Chang Z Y,Tang Y G, Li H J, et al. Analysis for the Deployment of Single-point Mooring Buoy System Based on Multi-body Dynamics Method [J],China Ocean Engineering, 2012,26(3):495-506.
[5] 张洋, 朱克强, 秦道武,等. 海洋潜标系统布放动力学分析[J]. 船舶工程, 2014(2):111-114.
基金项目:国家重点研发计划(2018YFC1405800);广东省促进经济发展专项资金(GDME-2018A002)
作者簡介:郑跃洲(1995-),男,硕士研究生。研究方向为船舶与海洋工程水动力学。
