
某MT系列饱和潜水支持船的船机桨匹配分析
2022-05-13 19:23杨威
广东造船 2022年2期
关键词:螺旋桨
杨威


摘 要:本文介绍CMHI121-MT6024和CMHI161-MT6023饱和潜水支持船在海上航行试验中,船舶正常航行或DP工况时,出现螺旋桨运行转速不能达到额定转速或理论转速,航速不能达到设计值。本文对其船机桨匹配特性进行分析,找出问题原因,提出解决方案,经整改后试验结果满足要求。
关键词:航行试验;螺旋桨;机桨匹配;特性曲线
中图分类号:U664.5 文献标识码:A
Analysis on Ship-engine-propeller Matching of MT Series Saturation Diving Support Vessel
YANG Wei
( China Merchants Heavy Industry (Shenzhen) Co., Ltd., Shenzhen 510725 )
Abstract: In the sea trial of CMHI121-MT6024 and CMHI161-MT6023 saturation diving support vessels, the actual propeller speed cannot reach the rated speed or theoretical speed, and the ship speed cannot reach the design value when the vessel is under normal sailing or DP conditions. Through the analysis on the ship-engine-propeller matching characteristics of the vessels, the cause of the problem is found, and the solution is put forward. the conclusion is drawn and the solution is put forward. After rectification, the test results meet the requirements.
Key words: Sea trial; Propeller; Ship-engine-propeller matching; Characteristic curve
1 前言
船舶的推进装置是将发动机(如柴油机、电动机)产生的机械能通过传动轴系传递给螺旋桨,从而产生推力推动船舶航行。螺旋桨所产生的推力,用来抵抗船舶运动所产生的合成阻力,当船舶受到的推力与受到的阻力相等时,船舶将以恒速航行。
船、螺旋桨、发动机三者,在运行工况下是相互制约的。当三者中任意一个特性变化,必定会导致其他两者的状态产生相应变化,从而影响三者工作特性的相互配合。船舶航行的航速、阻力等参数,不但受裝载量、风浪、海况等的影响,还受船体的尺度和线型的影响。船舶在航行中有多种工况,运转工况不同,船、机、桨三者的配合状况是不同的。所以要分析船舶、发动机、螺旋桨三者之间的匹配工作特性关系,需要首先获取其各自的工作特性,然后将其工作特性间的匹配性进行分析,以推断推进装置匹配的合理性,鉴别推进装置的匹配形式在各工况下的工作能力和适应性,并在设计中选择一套满足设计航速下的高效率、经济性好的的推进匹配形式。
2 船、机、桨三者基本特性
2.1 船舶阻力特性
船舶航行时,会受到相应的航行阻力,其阻力主要来自于空气和水。船舶总阻力包含:兴波阻力、摩擦阻力和粘性阻力三大部分,对不同航速的船,这三部分阻力在总阻力中的占比是不同的。
船舶总阻力R与航行速度VS 的二次方成正比,即
R=KRVS2(1)
式中:KR为阻力系数;VS为船舶的航速。
2.2 螺旋桨特性
2.2.1进程系数λp
螺旋桨在静水中每旋转一周的轴向前进距离为hp, 螺旋桨的直径为D,则螺旋桨的进程系数λp为hp/D表示。如果螺旋桨单位时间内回转np周,则螺旋桨的进速vp=hpnp,所以进程系数λp为:
λp=vp/Dnp(2)
从公式(2)可以看出,对于给定桨径为D的螺旋桨,进程系数λp会随着螺旋桨的进速vp和转速np的变化而变化,进程系数λp是表示螺旋桨运动状态的一个重要的参数。
2.2.2水动力特性
螺旋桨旋转会形成推力T,同时也受到水的阻力,该阻力矩Mp的作用方向与螺旋桨的旋转方向相反。所以当螺旋桨的进程系数与转速一定时,产生的推力和阻力矩的大小也是一定的。
螺旋桨的推力T,可表示为:
T =KTρnp2D4(3)
螺旋桨的扭矩Mp,可表示为:
Mp= KMρnp2D4(4)
上两式中:KT、KM分别称为螺旋桨的推力系数和扭矩系数;ρ为水的密度。
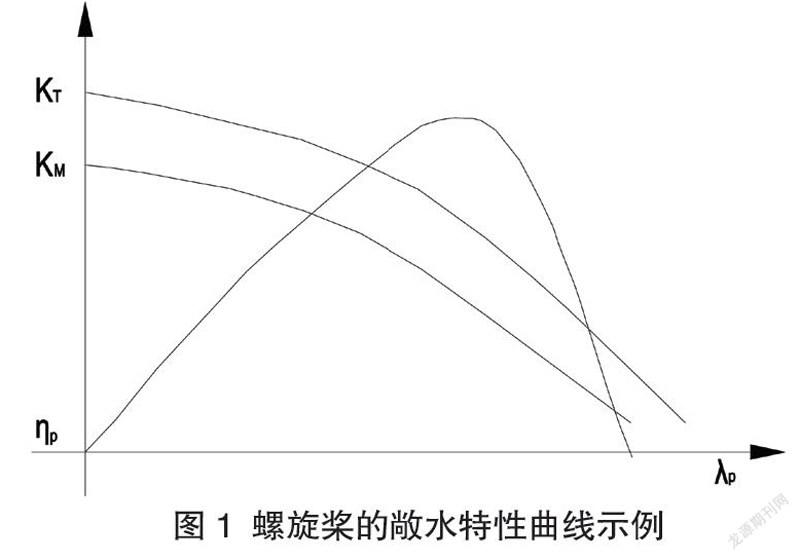
2.2.3 敞水特性曲线
螺旋桨的推力系数KT和扭矩系数KM,与进程系数λp呈一定的函数变化关系,KT和KM与λp的函数关系曲线,称为敞水特性曲线,如图1所示。
从图1可以看出:KT和KM随进程系数λp增大而减小,并且螺旋桨的推力T和阻力矩 Mp 与λp也有相同的函数变化关系。
2.2.4 推进特性
根据公式(3)(4)可知,对于给定的外形参数,在海况和操作工况稳定的情况下,λp、T、 Mp基本保持不变,皆可视为常数,那么螺旋桨的推力公式和扭矩公式可以近似的写为:
T =C1np2(5)
Mp= C2np2 (6)
从公式(5)、(6)可以看出:螺旋桨的推力T和扭矩Mp与转速np的平方成正比;而代表螺旋桨负荷的进程系数λp的变化又会引起曲线的变化,所以螺旋桨的扭矩与转速的推进特性曲线图如图2所示,曲线图中λ1<λ2<λ3,而对应的螺旋桨的负荷是由高到低。
2.3 电动推进器交流异步电动机的特性曲线
船用电动推进器,一般由三相交流异步电动机驱动。下面分析异步电动机转矩-转速的特性曲线。
从图3可知:bd段为稳定运行区域, bc段为不稳定运行区,所以电动机的实际运行区域仅为bd段,也就是说电动机最后会根据外部加载负荷对应的扭矩和转速而稳定在bd段的某一个点;又因为bd段大部分区域接近直线,所以在后续内容中主要以近似直线来表示在各种工况下,机桨配合特性曲线图中异步电动机的特性曲线。
通常,异步电动机有三种调速的方法(如图4)。
(1)调整磁极对数的调速;
(2)调整转差率的调速;
(3) 调整电网的频率调速。
在额定频率和转速以下,电动机的运行特性曲线是最大扭矩不变,称为恒转矩模式;反之则是最大功率不变,称为恒功率模式。
船、机、桨在整体运行工况下是互相牵制和互有联系的,其中某一个特性改变,会导致其他两者的运行状态的改变,进而导致三者配合工作特性的改变。三者的选型是为了满足设计航速下最合适的推进装置匹配形式,同时也要满足在某些特定非设计工况下船机桨匹配工作的能力和适应性,力求最合理的船机桨的匹配组合。
3 存在的问题及解决措施
3.1 存在的问题
由我司设计建造的MT系列大型多功能饱和潜水支持船,配有DP3动力定位系统。其中: CMHI121-MT6024尾部配2台电动全回转推进器,定距桨,功率3325 kW,电动机1 200 r/min、660 V、60 Hz;CMHI161-MT6023首部配有3台管隧式电动侧推进器,定距桨,功率1 800 kW,电动机880 r/min、660 V、60 Hz。
CMHI121-MT6024在航行测速试验时,气象和环境相对稳定,风力不大于蒲式风标3级,浪级不大于2级,潮流平稳,试验水深不小于25 m,船舶平均吃水5 m,船体状态平稳。试验过程中,当电动机显示扭矩已达到额定值时,主推进器转速却没有达到额定值,此时电动机的电流也没有达到额定值,船舶航速达不到设计航速。
CMHI161-MT6023在做DP系统整定时,首侧推的转速也没有达到额定值, KM厂家建议在DP系统整定值数据记录表格中填写实际运行达到的转速和功率,而不是填写理论设计值。
3.2 原因分析及解決措施
(1)CMHI121-MT6024原因分析
根据公式(3)可知,螺旋桨的推力与其转速的平方呈正比关系,螺旋桨推力没有达到额定值,其主要原因是螺旋桨偏重导致的,可以结合前述异步电动机和螺旋桨的各自特性曲线加以分析(见图5):
图5中曲线3为负荷较大的螺旋桨的特性曲线,曲线4为负荷较小的螺旋桨推进特性曲线,即曲线3进程系数小于曲线4的进程系数;曲线1为CMHI121-MT6024在船舶航速没有达到时推进电动机的转矩特性曲线,此时电动机转矩和螺旋桨推进特性曲线匹配的交点a对应的螺旋桨的转速为n1,显然并没有达到额定转速nN;而此时与电动机转矩曲线相交的为负荷较大的曲线3,如果螺旋桨实际负荷相对较小,如曲线4对应的螺旋桨则与电动机转矩曲线1的交点c对应的转速就能达到额定转速nN。因此,可以判定螺旋桨选型偏重,导致航速不能达到设计值,螺旋桨实际推进特性为曲线3。
此时,推进电动机必须发出更大的扭矩驱动螺旋桨,使螺旋桨增加转速,从而发出更大的推力,工作于b点。通常,通过增加电源供电频率来调整推进电动机的特性曲线,电动机转矩曲线平移至曲线2的位置,与螺旋桨推进特性曲线3相交于b点,此时b点对应的螺旋桨的转速能达到额定转速nN,此时推进电动机输出功率稍有增加,一般电机选型会留有一定功率裕度,所以在实际船舶测速试验中,通过调整频率增加螺旋桨的转速,使船舶航速达到设计航速值,问题得到解决。
(2)CMHI161-MT6023原因分析
按上述机桨配合理论,在当时DP系统整定的工况下,由于船舶航速较低,即首侧推螺旋桨的进速较小,导致代表螺旋桨负荷的进程系数比较小,此时螺旋桨处于重桨状态,如图6所示。
但并不表示螺旋桨一直会在此工况运行。随着船舶吃水、浮态的调整和运动速度增加,螺旋桨的进程系数会增加,推进特性曲线将由重桨逐渐变化到轻桨,即由特性曲线2变化到曲线3;而与电动机特性转矩曲线1的交点,由a变化到b,随之对应的螺旋桨转速也会由低速n1增大到额定转速nN,所以最初出现螺旋桨转速达不到并不代表有机桨匹配不合理的情况,所以船方坚持要求KM厂家在DP系统整定值数据记录表格中,填写的额定转速和功率值是合理的。
(3)解决措施
在实际航行中,船舶所处的各种工况和遭遇的海况等外部条件是十分复杂和多变的,并且发电机组原动机在恶劣环境中性能老化机械效率下降,发不出最大持續功率。原动机带动发电机提供电力供电推进器,为了保证原动机能够长期可靠的运行,即使因外界各种原因导致船舶航行阻力增加,也能长时间保持稳定航速不变。也就是当螺旋桨的推进特性曲线由轻载变化到重载之后,转矩和功率增加以保证转速不变,这就要求在设计选型阶段选配的原动机有足够功率贮备,保证推进电动机有足够推力保证船舶航速,使原动机能长期保持持续服务功率,在一定情况下甚至有余量发出更大功率。
对于柴油机直接驱动的船舶,也不排除有的船舶在设计选型阶段,以螺旋桨转速和发动机满负荷100%功率的船机桨匹配的平衡交点,作为设计工况点。此时虽然发动机功率没有留出裕度,但是一般会在设计阶段把船体的阻力增加一定的贮备裕度,这样匹配的发动机的功率相应也就增加了裕度;或者有的船舶在机桨选型阶段,用提高螺旋桨的设计转速的方式去匹配发动机,称之为转速贮备。
无论上述哪种情况,发动机的需留有一定的功率储备或者转速贮备,让螺旋桨设计得更轻,这样可避免在船舶长时间运营后,由于各种原因使船体阻力增加或海况变差而导致螺旋桨变重,使螺旋桨转速不够而达不到船舶所需的航速。
4 结束语
众所周知,不同航行工况、不同海况条件下机桨配合的特性曲线交点位置是随之变化的,对应于不同的匹配关系。推进装置设计时,应考虑各种不同工况的机桨匹配情况,特别是在最不利的工况点,如大风浪、进出港等重负荷工况。
参考文献
[1]施仲篪,杨承参,施润华. 轮机学[M],上海:上海交通大学出版社,1988.
[2]刘波. 船舶电力推进及船机桨工况配合[D],武汉理工大学,2005.
猜你喜欢
作文·小学低年级(2021年8期)2021-11-02
作文与考试·小学低年级版(2021年12期)2021-08-09
阅读(快乐英语中年级)(2020年10期)2020-12-09
航空世界(2019年1期)2019-10-11
科普童话·百科探秘(2018年10期)2018-10-25
航海(2018年2期)2018-06-11
航空模型(2017年5期)2017-12-14
中学科技(2017年10期)2017-11-04
航空模型(2016年5期)2016-07-25
阅读与作文(初中版)(2009年3期)2009-03-31
