车路协同和自动驾驶环境下交叉口的通行控制研究
2022-05-13 08:45王超然杨世纪吴仇颀吴宇轩
物流科技 2022年5期
王超然,赵 靑,杨世纪,吴仇颀,吴宇轩
(南京林业大学 汽车与交通工程学院,江苏 南京 210037)
0 引言
道路交叉口是城市道路中的重要组成部分,而信号控制则是当前交叉路口的主要控制模式,通过信号灯保证交叉路口的平稳运行。但随着车路协同与自动驾驶的深入研究,交叉口的控制正在发生革命性变革。
车路协同自动驾驶系统通过先进的车、路感知设备对道路交通环境进行实时高精度感知,按照约定的通信协议和数据交互标准,实现车与车以及车与道路交通设施间不同程度的信息交互和共享,最终形成一个能够整合、协调、控制、管理和优化所有车辆、信息服务、设施设备、智能化交通管理的以车路协同自动驾驶为核心的新一代智能交通系统。车路协同和自动驾驶系统既避免了人为操作不当导致的交通事故,又可从整体角度优化交通系统运行状况,缓解拥堵问题。
在车路协同和自动驾驶环境下交通控制方法的探讨中,国内外专家学者进行了大量的研究。Huang C J等将车辆控制方法主要分为集中式控制模式和分布式控制模式。Zohdy I H等根据驾驶员驾驶车辆时的行为提出了基于动态博弈论的控制方法,用博弈论算法对车辆交叉口通行方式进行决策,利用车辆自适应巡航技术对车辆行为进行控制。王建强等开发了一种基于车路一体化的交叉口车辆驾驶辅助系统,系统提出一种反映驾驶人减速特性的速度阈值算法来实时判断行车危险度。常灿基于车路协同技术提出了不同流量下的交叉口控制模型在低流量的情况下,以安全和通行时间最少为目标的优化模型。上官伟设计并采用基于时延Petri网的无信号交叉口优化控制方法,利用TdPN建立无信号交叉口控制模型,并依此建立交叉口车辆最快消散目标函数,采用递归方式求解车辆最优通过序列。胡梦岩提出了一种基于冲突消解策略的车辆行为控制方法。以两车道十字型交叉口为研究对象,针对其中的交叉冲突与合流冲突建立了无信号交叉口优先通行决策库。结合现有的冲突消解算法,在考虑乘客舒适性的基础上,提出了一种车辆冲突消解速度优化方法消解了交叉口智能网联车辆的潜在冲突,提高了交叉口通行能力和乘客舒适性。
现有研究已经开展了车路协同环境或自动驾驶环境下交叉口的基础性研究,但将两种环境结合并提出优化控制策略较少。本文拟以车路协同和自动驾驶环境为背景,以车辆通行安全和车辆通行延误为目标,构建普通十字交叉口的车辆通行控制方法,并搭建了车路协同和自动驾驶条件下交叉路口的通行控制仿真平台。通过列举由仿真平台得出的交通评价参数的方式检验提出方法的有效性。
1 交叉口通行控制算法
当任一方向有车辆触碰确定区边界时,优化程序被触发。搜索最近一组冲突车辆。冲突分为三种可能:两路冲突、三路冲突、四路冲突。
对于两路冲突,确定两条道路上(a方向和c方向)第一对产生冲突的车辆;优化程序提供两种消除车辆冲突的备选方案;通过计算两种备选方案下系统可能的总延误时间D,来决定采取哪种方案;提取该最优解中每辆车对应的延误时间D,通过车辆状态变化模型计算出每辆车辆对应的减速时间;根据车辆状态变化模型计算出的每辆车辆对应的加速时间和减速时间生成对应车辆指令,指令延误车辆根据车辆状态变化模型行驶;继续搜索车辆行驶状态变化后系统中第一组冲突点,循环以上内容直至没有冲突点。
两种消除冲突的备选方案包括:(1)a方向车辆正常行驶,c方向车辆减速让行;(2)c方向车辆正常行驶,a方向车辆减速让行。减速车辆延误时间为另一辆车预计到达交叉口中心点车头时距及异向最小车头时距的总和与该车原预计到达交叉口中心点车头时距之差。其中,异向最小车头时距为在车辆均以一般速度行驶的条件下,异向车辆正好满足穿插通行状态的到达交叉口中心点的最小车头时距。
对于三路冲突,按两方向冲突方法判断出最近一对冲突车辆通行次序后,判断该组冲突车辆中第三辆车是否能加速与对向车辆同时通过,若判断为能加速通过,则确定通行方案,反之,则转变为二路冲突继续判断以消除冲突。
对于四路冲突,按两方向冲突方法判断出最近一对冲突车辆通行次序后,判断该组冲突车辆中第三辆离交叉口中心点预计车头时距最小的车是否能加速与对向车辆同时通过,若能,则转变为已确定通行方案的两路冲突,若不能,则转变为三路冲突继续判断以消除冲突。提取最优解中每辆车对应的延误时间D,通过车辆状态变化模型计算出每个车辆对应的减速时间。根据车辆状态变化模型计算出的每辆车辆对应的加速时间和减速时间生成对应车辆指令,指令延误车辆根据车辆状态变化模型行驶。继续搜索车辆行驶状态变化后系统中第一组冲突点,循环以上内容直至没有冲突点。普通十字交叉口智能通行控制方法流程如图1所示。

图1 普通十字交叉口智能通行控制方法流程图
2 交叉口通行控制仿真模型构建
2.1 确定区和控制区
为满足交叉口内车辆的安全通行,并保证车辆实现延误指令,本算法设置了控制区和确定区两个区域。
(1)确定区
确定区:车辆在确定的预计车头时距后通行的区域。其中确定区边界是实现算法目标的算法触发位置,当任意车辆触碰确定区边界时,算法触发,以系统总延误时间最小为目标,车辆确定到达交叉口中心点的预计车头时距,以车辆行驶原状态为基准,确定各车辆相应的延误时间或提前时间,车辆立即进行相应的速度调控。
确定区范围:以确定区宽度为边长的正方形范围,使得确定区范围满足车辆接受到停车指令后立即刹车,可以在与相交道路冲突车辆行驶路径外停车等待。

式中:v、a为车辆一般车速和车辆最大加速度。
(2)控制区
控制区:收集上游临近交叉口车辆进入目标交叉口的状态信息;保证跟驰冲突车辆重新进入正常跟驰状态的区域。
控制区范围:目标交叉口的上游临近交叉口确定区较近边界中点连线所围成的封闭图形。
2.2 冲突检测模型
该模型以目标车辆占用相交车道车辆在交叉口通行轨迹的时间为基准,结合相交车道车辆到达该位置时刻判断车辆是否冲突,在任意方向车辆车头触碰确定区时触发。

图2 确定区范围样例
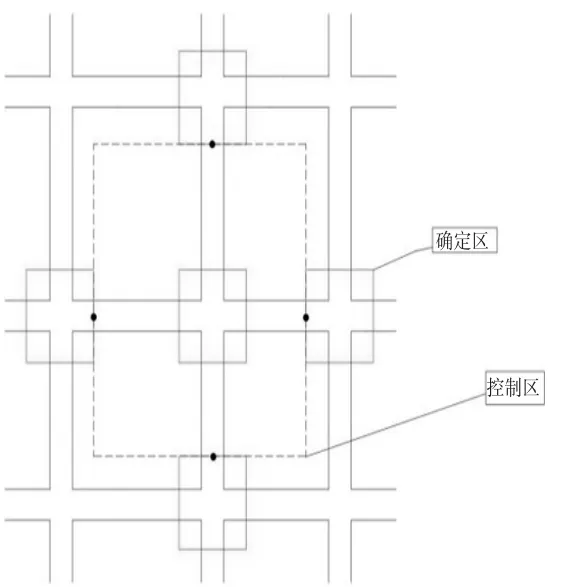
图3 控制区范围样例

图4 冲突检测模型举例
设车辆a、b为一组冲突判断车辆,a车较b车提前触碰确定区边界,a位置为a车车头触碰车辆b行驶轨迹位置,a位置为a车车尾离开车辆b行驶轨迹位置。当a车辆触碰确定区边界时,由a车当前行驶速度v与距a和a两个判定位置的距离可以求出预计到达时间,假设分别为t、t,若b车预计到达a车轨迹位置时间t大小处于[t, t]区间,则判定为该组车辆冲突,否则判定为不冲突。
2.3 跟驰模型
为避免同向车辆因速度差异而产生追尾事故,设置包括最小制动间距和最小跟驰距离的安全跟驰间距E,以此为判断依据,若同向两相邻车辆车头间距大于该值,则判定为无追尾风险,车辆均按原状态行驶;若小于该值,则判断为有追尾风险,后车应立即进入减速状态,其中后车延误时间为前车预计到达交叉口中心点车头时距及同向最小车头时距的总和与后车原预计到达交叉口中心点车头时距之差。其中,同向最小车头时距为车辆跟驰状态下的最小车头时距。

式中:E为安全跟驰间距,v()为后车当前速度,v()为前车当前速度,a为车辆最大加速度,t是指令生成并传输时间。
2.4 车辆状态变化模型
为实现附加在车辆上的延误时间及提前时间,依据车辆加减速特征,制作出3种车辆状态变化模型。车辆状态变化曲线均符合函数:

式中:v为车辆速度,t为车辆行驶时间,Z为车辆当前速度,a、b、c为参数,可由待定系数法求得。
以平台设计中保证任何速度车辆均可以实现车辆状态变化指令;对于不同状态车辆,车辆最大加速度为5m/s,以图像所围面积间的等值关为标准进行参数赋予。
其中,减速模型与减速停车模型均对应延误车辆状态变化,不同的是减速停车模型针对于延误时间较大车辆,而减速模型针对于延误时间较小,不用以停车指令来满足所需延误时间的目标车辆。
2.5 其它关键参数设置
其中:异向最小车头时距为在车辆均以一般速度行驶的条件下,异向车辆正好满足穿插通行状态的到达交叉口中心点的最小车头时距。同向最小车头时距为车辆均以一般速度行驶的条件下同向车辆最小跟车时距,同向车辆在保持该跟车时距情况下,异向车辆可以正好穿插在该间隙通过。一般车速是车辆一般状态下行驶时的速度。最大车速是车辆需要加速通行时所能瞬间加速到的最大车速。
2.6 仿真平台实现
搭建平台所用的设计工具为VB。在显示部分,利用VB提供可视化控件完成操作。逻辑部分主要用VB Script中的Function关键词以及Sub过程完成不同逻辑块的实现,主要有车辆状态变化模型、冲突检测模型等。

图5 减速模型
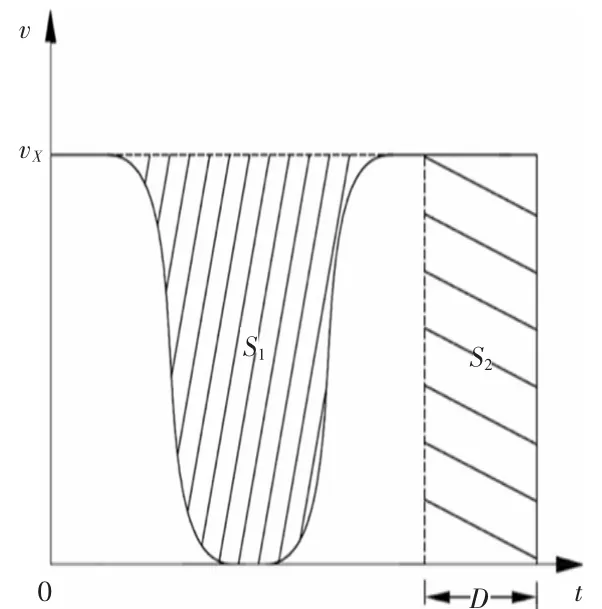
图6 减速停车模型

图7 加速模型

表1 参数设置表

图8 交通仿真平台界面
3 交叉口通行控制仿真实验
3.1 均衡车流负载仿真实验
针对不同交通负载(交叉口交通总流量分别为300veh/h、700veh/h、1 000veh/h、1 300veh/h),利用智能通行控制方法对交叉口进行仿真模拟,并进行数据统计。本文采用的评价参数包括交叉口平均延误、平均速度、平均停车次数和平均排队长度。具体结果如表2所示。
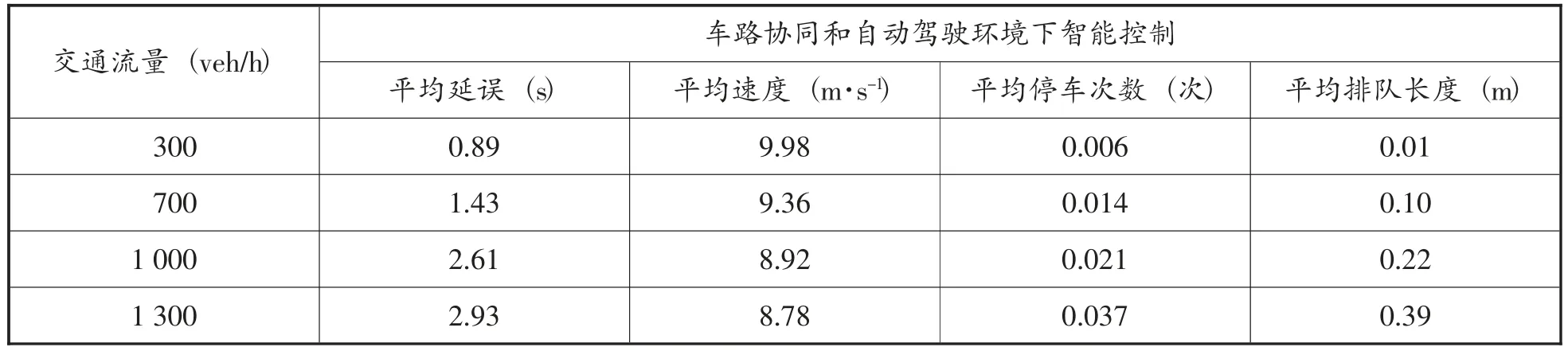
表2 均衡车流环境下仿真结果
在不同的交通负载下,该种交叉口交通评价参数如表2所示。当交通负载较小时,本算法通行控制效果较好,平均延误、平均停车次数和平均排队长度三项参数随交通负载量的提升呈正相关。反之,平均速度随交通负载的提升呈负相关。从数值上来看,本交通通行控制算法显著提升了交叉口的通行效率,可认为本文提出的交叉口车辆通行控制方法具有有效性。
3.2 不均衡车流负载仿真实验
针对不同方向交通流大小相差很大的情况,本小节对交叉口不均衡车流负载的情况进行试验。交叉口总体车流负载为1 300veh/h,分别就主要车流与次要车流比为300∶1 000、600∶700、900∶400三种情况进行仿真。仿真结果如表3所示。
由表3可知,在交通负载不均衡的条件下,当主次交通流量相差较大时,本文提出的通行控制方法相较于另外两种车流负载情况通行控制效果较差;当主次流量接近时,交通通行控制效果最好。根据交叉口平均延误、平均速度、平均停车次数和平均排队长度的实验结果,可认为本文提出的交叉口车辆通行控制方法显著提升了交叉口通行效率,具有有效性。

表3 不均衡车流环境下仿真结果
4 结论
本文以车路协同与自动驾驶为虚拟背景,将单向通行道路相交交叉口和普通十字交叉口为对象,以车辆通行安全和延误最小为目标,提出了两种不同类型交叉口的车辆通行控制方法,并构建了交通仿真平台。通过和感应式信号控制以及定时信号控制方法的对比分析,证明了本文提出的交叉口通行控制方法不仅可保障车路协同与自动驾驶环境下车辆的安全通行,且能够显著降低系统的车辆延误时间,该方法在未来的智能交通环境下具有一定的适用性。但为简化控制方法及模型,本文未考虑车辆转向的影响,在未来研究中,应在现有控制方法基础上进行拓展,进一步提高控制方法的实用性。
5 创新点
本研究的创新之处主要体现在以下三个方面:
(1)以虚拟的未来智能交通环境为背景具有超前性。车路协同和自动驾驶是未来智能交通必然面临的新场景和新挑战,如何应对未来智能交通环境下的交通控制具有较强的客观需求。
(2)提出了未来智能交通环境下车辆在交叉口处的通行控制方法。本文提出的车辆通行控制方法具有较强的新颖性,且通过对比分析证明了提出的方法具有一定的优越性。
(3)实现了对通行控制算法的仿真。本文不仅在理论层面上进行了研究,还独立设计了未来智能交通环境下交叉口的仿真平台,可直观展示未来的交叉口运行状态以及本次研究成果的实际应用效果。
猜你喜欢
人类工效学(2021年5期)2022-01-15
军事文摘(2020年24期)2020-02-06
绥化学院学报(2019年10期)2019-10-12
汽车观察(2019年2期)2019-03-15
中国交通信息化(2018年12期)2018-03-21
心理科学进展(2018年8期)2018-02-21
中国老区建设(2016年4期)2017-01-15
心理科学进展(2015年5期)2015-02-26
大连交通大学学报(2012年2期)2012-07-02