
基于TRIZ理论的变速安全跷跷板创新设计
2022-05-25 18:39葛庆汪崟
设计 2022年7期
葛庆 汪崟

关键词:TRIZ理论 跷跷板 功能 矛盾分析 创新设计
引言
TRIZ(发明问题解决理论)找到了不同技术创新领域的共同客观规律,能够将困难的创新问题转化为标准问题指导发明创造。其主要的应用领域包括:解决工程问题,竞争专利规避,与产品研发体系的集成,失效预测分析,可持续设计,技术预测等。从二十世纪50年代至今,逐渐成为科学家、发明家以及工程师解决问题的有力武器。我国近20年三大TRIZ研究热点[1]主要集中在①TRIZ、发明问题解决理论、创新设计,②创新、概念设计、产品设计,③关联模型、工业设计、设计方法。TRIZ理论体系在解决创新问题上拥有强大优势,对工业设计创新需求高度契合。
跷跷板是一种古老而传统的游戏用具。基本结构是在狭长而厚的木板中间安装转轴,然后连接在支架上,两人对坐两端,轮流用脚蹬地,使一端跷起,另一端下落,如此反复,体验乐趣,是中国传统趣味文化的体现。目前,常用的跷跷板采用的基本是一整根力臂,当双方以较快的速度运动,一方到达底部碰地则会突然停止,由于存在瞬心加速度[2],此时另一方则会继续以较快的速度向上运动,如果手握不住或体重较小,则会被抛向空中,从而造成事故。尤其对于儿童以及体弱或有生理缺陷的人来说,缺少一套既能保障使用安全又充满乐趣的跷跷板用具。
目前生活中能够见到的跷跷板产品基本都是简单的外观变化与功能叠加,创新面较狭窄,创新点较单一。创新方法依然延续了试错法或者经验设计法,创新效果有限。虽然使用了发散性思维搜索问题解决办法,但所需创新的人力与时间很大,造成效率低下和资源浪费。
本研究将以此为背景,使用TRIZ理论工具全面深入剖析这一古老而有趣的技术系统,进行可变速安全跷跷板的创新设计,形成一套可行的解决方案,实现跷跷板的深层使用功能,提升产品的社会价值。
一、研究流程
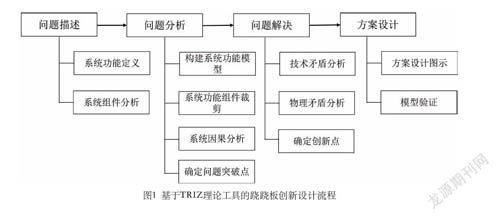
TRIZ解決问题的基本思路是将具体问题转化为典型问题,然后根据问题属性有针对性地应用不同TRIZ工具获得典型解决方案模型。因此,研究流程主要分为问题描述、问题分析、问题解决、方案设计四步骤(见图1)。
问题描述阶段,将对跷跷板技术系统进行功能定义与组件分析。问题分析阶段,将构建跷跷板系统功能模型,进行系统功能裁剪,除去负面功能的组件,获得新系统功能模型;并针对问题原因进行系统因果分析,确定解决问题突破点。问题解决阶段,利用TRIZ矛盾工具进行跷跷板系统的技术矛盾与物理矛盾分析,查询矛盾矩阵得到所对应的发明原理,结合跷跷板系统实际情况确定典型解决方案,获得若干创新概念。最后进行方案设计,将创新概念图示化设计并进行模型验证。
二、研究过程
(一)问题描述
1.系统功能定义
TRIZ所界定的功能是对产品或技术系统特定工作能力抽象化的描述[3],采用SVOP定义法 [4]来规范。其中,S表示技术系统或功能载体名称,V表示施加动作,O表示作用对象,P表示作用对象“被改变或保持的”参数。
如图2,对传统跷跷板技术系统进行功能定义,作为功能载体的跷跷板,对人体施加了移动作用,使之产生了速度和高度上的变化。可得功能定义公式:S+V+O+P=跷跷板系统+移动+人体+高度/速度。
2.系统功能分析
系统功能分析是将抽象的技术系统转化为具体的组件列表,并从完成功能的角度分析系统组件之间的关系。以便于设计者了解产品所需具备的功能与特征,或者通过定义与描述系统组件所需达到的功能,以及组件之间和与外界环境的相互作用来分析整体系统,能够协助设计人员化繁为简,合理地进行创新设计。
(1)组件拆分。组件一般是指组成技术系统或超系统的一个组成部分,是由物质或者场组成的一个物体[5]。通过系统组件拆分,可识别技术系统的组件及其超系统组件,从而得到系统组件和超系统组件列表。对传统跷跷板技术系统进行组件分析,可获得组件列表。如表1所示,超系统组件为重力场,人体与地面;系统组件为支架、横杆;子系统组件包括支架内的旋转轴、底座等,及横杆内的座椅、扶手等。
(2)组件相互作用分析
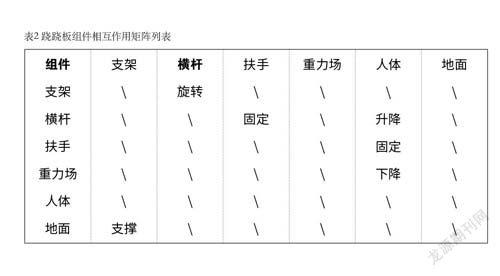
为了全面识别系统组件及超系统组件之间的相互关系,以免遗漏,可通过构建相互作用矩阵进行相互作用分析。组件之间的作用分为两种,一种是物质与物质的作用,一般都是双向的,两个作用都要考虑,然后根据需要选择主要作用来重点分析,次要作用可忽略;另一种是物质与场的作用,一般是单向的,要判断正确的作用方向。
传统跷跷板技术系统可确定需要分析的组件和子组件为支架、横杆、扶手、重力场、人体及地面。通过构建跷跷板各组件的相互作用矩阵表(见表2),将竖列的各组件依次与横列的各组件进行作用分析,可以得出组件相互间的主要功能为:支架固定着力臂横杆使其能够旋转;横杆固定着扶手,同时带动人体产生升降;扶手让人抓握固定住人体;重力场使人体下降;地面支撑支架。
(二)问题分析
1.建立系统功能模型
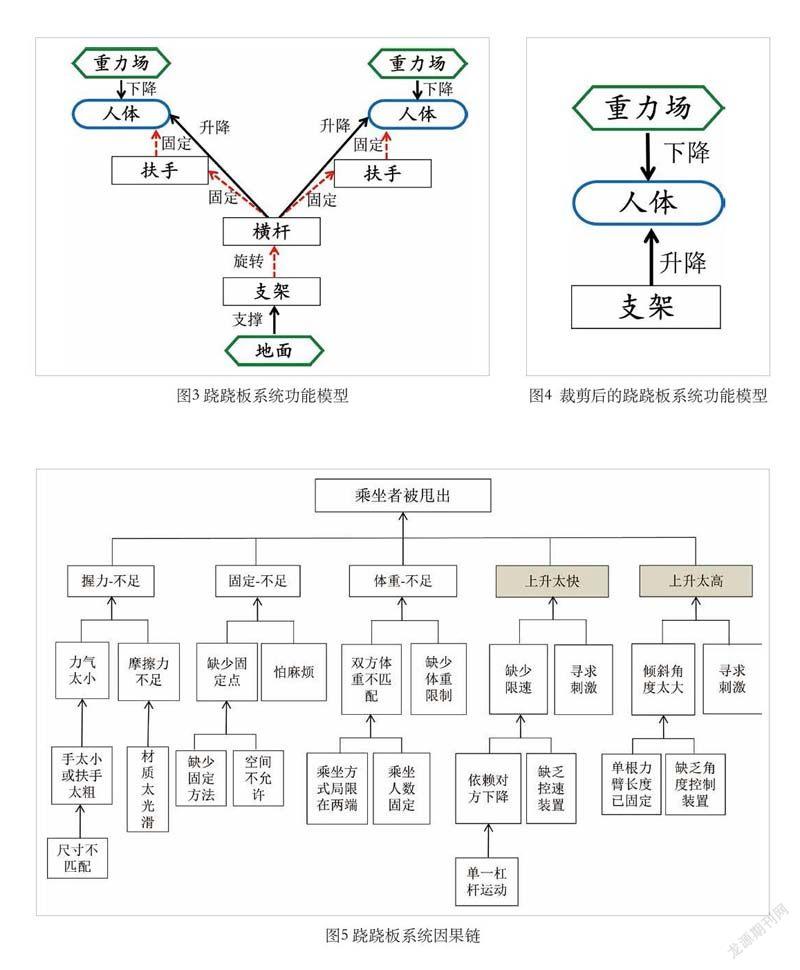
根据跷跷板技术系统功能定义公式“S+V+O+P=跷跷板系统+移动+人体+高度/速度”,构建系统功能模型(见图3)。通过分析该图中组件功能发现:⑴支架对横杆的旋转作用,⑵横杆对扶手固定作用,⑶扶手对人体的固定作用,三处功能均会出现不安全因素,属于系统功能提供不足,用红色虚线箭头表示。
2.系统裁剪
系统裁剪即根据系统需要尝试将系统中的某些带负面功能的组件进行裁剪[6],同时把其有用功能提取出来,让系统中的其他组件(包括新引入的组件和原有组件)或超系统去实现这个功能,从而达到精简组件数量,降低成本,提高系统理想度的目的。通过裁剪既消除了负面功能又保证所执行的有用功能依旧存在,提高系统理想化程度,更好地利用系统内外资源。
系统负面功能主要包括,不足、有害和过度,因此对图3所示系统功能模型可进行的裁剪操作包括:⑴对产生不足功能的组件横杆、扶手进行裁剪,⑵对功能与支架相似的组件进行合并,⑶对相同特征相似操作的重复组件进行合并[7],⑷对超系统组件地面裁剪。在SVOP功能定义保持不变下,最终获得新模型(见图4)。该模型将跷跷板系统精简为在重力场对人体下降作用同时,支架对人体的升降作用。
3.因果分析
在因果分析中,通过构建因果链,找出引发该问题的根本原因,分析出结果与根本原因之间存在的一系列因果关系,可为解决问题寻找入手点。在因果分析中要同时寻找内因和外因,内因是产生结果的根据,外因是产生结果的条件,这样做有助于对问题进行全面细致的分析。
如图5所示,围绕传统跷跷板系统最核心的安全问题“乘坐者被甩出”,通过绘制因果链发现,导致该的直接原因主要包含“握力不足”“固定不足”“体重不足”“上升太快”“上升太高”等五方面。其中,“握力不足”主要由内因“力气太小”与外因“摩擦力不足”导致;“固定不足”主要由内因“怕麻烦”与外因“缺少固定点”导致;“体重不足”主要由内因“双方体重不匹配”与外因“缺少体重限制”导致;“上升太快”主要由内因“寻求刺激”与外因“缺少限速”导致;“上升太高”主要由主要由内因“寻求刺激”与外因“旋转角度太大”导致。
查询近三年跷跷板发明专利,可得目前的跷跷板创新设计主要集中于四个方面:①解决两边游戏者体重不同的问题:用磁吸改变下降的力,单边边增加配重块,通过伸缩改变一边的力臂长短,多人单侧玩,调节摆动幅度,增加助力等;②解决乘坐者安全防护的问题:座椅充气,底部加缓冲弹簧,防砸与固定脚;③增加其他功能装置:风扇,屋顶,互联网,摇篮等;④增加娱乐性:声光电,与其他娱乐器材结合,如滑滑梯、秋千、蹦床,与其它建身器材结合,如仰卧起坐器等。
其中①和②已对因果链中的“握力不足”“固定不足”“体重不足”等原因提出了若干解决方案,在此不作为分析重点。而导致乘坐者被甩出的“上升太快”和“上升太高”,则可成为创新突破点进行深入研究。
(三)解决问题
大量技术创新实践证明,矛盾分析与40条发明原理是目前最常用、贡献度最高的TRIZ工具[8]。产品创新设计要解决发明问题,解决至少一个设计冲突是其标志。因此,利用TRIZ工具对跷跷板系统进行创新设计的根本任务就是解决系统中存在的矛盾冲突。通过提取系统矛盾,查询矛盾矩阵,即可到若干有用的发明原理,对其进行具体应用与实现便可获得新的概念方案。
1.技术矛盾分析引入一种有用功能而导致产生一种有害功能,即构成了一对技术矛盾。技术矛盾分析分为两步骤:⑴确定技术参数,⑵查询技术矛盾矩阵得到对应的发明原理。在因果分析中已明确,导致“乘坐者被甩出”这种不安全结果的重要原因为“上升太快”和“上升太高”。由此分析,传统跷跷板技术系统存在两对技术矛盾:游戏时运动速度快导致产生安全性降低;游戏时运动高度高导致产生安全性降低。根据查询TRIZ理论39个通用工程参数,代表快慢的技术参数为“速度”,代表高度的技术参数为“运动物体尺寸”,都属于需要改善的技术参数;恶化的技术参数为“安全性”。可提取的两对技术矛盾分别为:“速度”——“安全性”;“运动物体尺寸”——“安全性”。通过查询TRIZ技术矛盾矩阵,可获得解决该矛盾的发明原理(见表3)。
2.物理矛盾分析TRIZ指出,在绝大多数情况下技术矛盾都可以转化为物理矛盾[9]。对同一系统的同一个工程参数提出了互斥的要求,即构成物理矛盾。跷跷板技术矛盾所反应出的本质问题,是如何在提高游戏乐趣的同时,让乘坐者的安全性也能够得到保障。我们可以发现,乘坐者在改变升降幅度和快慢的过程中寻求刺激体验乐趣,是要求跷跷板具有不稳定性,而乘坐者所需要的安全保障,是要求跷跷板具有良好的稳定性,因此,跷跷板对“稳定性”提出了互斥的要求。根据TRIZ理论39个通用工程参数,可将技术参数“稳定性”,作为该跷跷板系统的物理矛盾。查询TRIZ 2003矛盾矩阵对角线处物理矛盾的解决方案,可获得相应的发明原理(见表4)。
3.确定概念方案将技术矛盾查询与物理矛盾查询所获得发明原理进行比较,重复多次出现发明原理作为重点可应用对象进行概念拓展。对比表3与表4,技术矛盾“速度——安全性”与解决物理矛盾“稳定性”的对应重复出现发明原理编号是24、10、2;技术矛盾“运动物体的尺寸——安全性”与解决物理矛盾“稳定性”的对应重复出现发明原理编号是35、5、1、2。其中重复次数最多的发明原理编号2 将重点挖掘。
分别对上述发明原理进行具体应用(见表5),我们可得到若干创新概念方案。
三、方案设计展示
将表5中的文字概念方案描述进行功能外观结构图示化设计,可获得“滑杆式跷跷板”等多项设计方案。
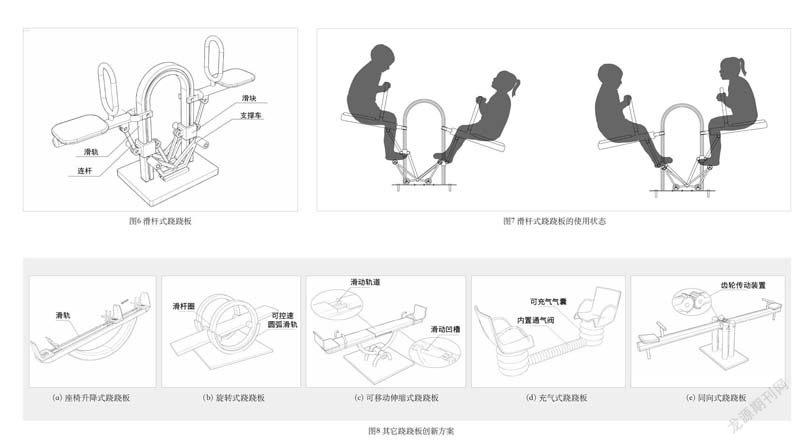
(一)滑杆式跷跷板方案展示本方案应用发明原理2——抽出原理,抽出“支点”进行机构创新设计,将跷跷板绕支点旋转的简单运动改变为较复杂的机械结构运动,以控制升降幅度与速度。
如图7所示,主要组件包括可左右移动的支撑车,滑轨、滑块、连杆组成的传动机构,以及一端固定在滑杆上的座椅杆。
如图8所示,运动过程中,当乘坐者脚蹬支撑车一端时,支撑车向另一端滑动,带动连杆运动而使滑块发生向上滑动,又带动上部连杆推动座椅杆产生倾斜升降。左右乘坐者交替蹬支撑车,从而使座椅杆交替升降。由于两个座椅杆转动时有速度差,座椅杆上升过程中从最低点移动到最高点是做减速运动,减小了传统跷跷板左右等速运动存在的瞬心加速度,避免了传统跷跷板以较快速度移动到顶部时可能发生的事故,安全性能更高。根据该运动原理,本方案除图6、7所示外,还存在很多其他变形。
(二)其他跷跷板方案设计展示座椅升降式跷跷板,见图8 ⒜。该方案应用发明原理2——抽出原理,抽出负面影响“上升高度”问题。将座椅扶手组件设计为可滑动。
当一边升高时,该边座椅会沿滑轨自动下滑一定高度,同时另一边座椅下滑回原始位置。如此往复,通过降低上升者高度,解决乘坐者被甩出的安全问题。
旋转式跷跷板,见图8 ⒝。该方案应用发明原理24——中介原理,将传统跷跷板结构上的单支点设计为滑杆圈与可控速圆弧滑轨,控制旋转速度与幅度。通过圆弧滑轨控制滑杆的旋转速度与角度,进而控制跷跷板升降速度与高度,以增加其安全性。
移动伸缩式跷跷板,见图8⒞。该方案应用发明原理10——预想作用原理,在力臂杆上部与底部均设置滑轨,可预先左右滑动伸缩,力臂杆位置和长短,满足不同体重者游戏,同时改变升降高度,提高安全性。
充气式跷跷板,见图8⒟。该方案应用发明原理35——状态和参数变化原理,将跷跷板两边升降支架设计为可充气气囊,中间连接通气阀。游戏时,通气阀分别可对两边的伸缩气囊进行充气与放气,带动乘坐者同时升降或先后升降。
同向式跷跷板,见图8 ⒠。该方案是发明原理1——分离原理的应用。将传统跷跷板的单支点进行分割,成为两个独立的齿轮传动装置。在游戏的过程中,通过齿轮机构传动,使两边可同方向升降,增加安全感与趣味性。
四、实物模型验证
以滑杆式跷跷板为例,使用3D打印技术对其进行功能结构测试,如图9所示,验证了该方案能够初步实现预设功能,机械结构简单可靠,占地面积小,使用寿命长,功能新颖,市场价值大,目前已获国家发明专利授权。
结语
本文运用TRIZ理论中的功能定义和组件分析工具建立跷跷板技术系统功能模型;围绕跷跷板乘坐安全性问题进行因果分析,获得创新突破点;再使用矛盾分析工具獲得相应发明创造原理和概念方案;最后进行了方案外观结构设计与实物模型验证。本次设计实践中,通过TRIZ理论相关工具使用,同时获得了6项可行性较高的设计方案,极大提高了创新设计效率,增加了专利数量,提升了专利质量。后续将进一步对概念方案进行拓展设计,在保障跷跷板运动安全性的前提下,对变速运动进行精细化与量化研究,深化功能可行性验证。
猜你喜欢
科技创新与品牌(2016年12期)2017-01-17
中国市场(2016年41期)2016-11-28
中国市场(2016年38期)2016-11-15
科技视界(2016年22期)2016-10-18
现代园艺(2016年17期)2016-10-17
学苑创造·A版(2016年9期)2016-10-10
考试周刊(2016年77期)2016-10-09
科技视界(2016年4期)2016-02-22
小雪花·成长指南(2015年7期)2015-08-11
数学大王·低年级(2009年9期)2009-12-15
