
基于无人机多光谱数据的张山水库水质估算初探
2022-05-27 03:14龙昶宇
治淮 2022年5期
龙昶宇 营 军
(1.安徽省·水利部淮河水利委员会水利科学研究院(安徽省水利工程质量检测中心站)合肥 230088 2.水利水资源安徽省重点实验室 合肥 230088 3.淮北市水土保持和水利规划室淮北 235000)
1 引言
现场测量实现水体污染监测的方法已经十分成熟,但是这类方法对于区域尺度的水体污染情况不能提供有效信息。随着遥感影像的时空分辨率的增加和逐步深入应用,促进了区域尺度的水体污染监测技术的发展。多光谱卫星传感器获取的影像数据与现场水质测量数据的结合,已经被广泛应用于估测叶绿素a、赛克盘深度、总磷、总氮、浊度、水色等多种水质参数,以及叶绿素a、赛克盘深度和总磷三个参数推导出来的卡尔森营养状态指数等。虽然多光谱卫星图像已经在水库水质监测中得到广泛应用,但有学者认为多光谱卫星图像的尺度不适用于小水库的水质监测。此外,实地测量与影像获取的云层遮盖和时间间隔也会对水质状态制图产生不利影响。
为了较大程度降低混合像元、大气效应、数据获取时间差、水流动的波纹效应和镜面反射、有限的采样点水质分析结果等的影响,使用窗口平均方法分别建立总氮(TN)、总磷(Tp)和化学需氧量(COD)等水质参数指标与UAV 波段比数据(绿、红、红边和近红外波段的排列相比的值)相关性的回归模型。一方面是为了研究窗口平均算法在水质映射经验模型建模方面的性能,另一方面是为了研究无人机的多光谱数据是否适用于小型水库水质监测。
2 研究区与数据源
2.1 研究区
张山水库位于安徽省滁州市定远县西北方向西卅店镇北张庄村境内,水库覆盖面积约0.34km2,总库容约244 万m3。张山水库是一座小型水库,水库水源既要灌溉下游农户耕地,还要供给周围林场牧场规模化畜禽养殖,因此被选定为研究地点。2019年10月23日采样当天,水库8 时水位117.81m,库容28.6 万m3。
2.2 无人机数据预处理
该研究使用的无人机遥感系统主要获取的是绿波段(G:550nm,带宽40nm)、红波段(R:660nm,带宽40nm)、红边光波段(Red_edge:735nm,带宽10nm)以及近红外波段(NIR:790nm,带宽40nm)的多光谱图像数据(格式为带有坐标信息的TIFF 格式)。张山水库的成像面积约42.8hm2,单飞一程有730 个定点拍摄,总共获取730×4 张图像,每张图像的像素大小为1280×960。图像预处理的流程主要包括软件的拼接处理和图像几何校正。该研究利用Pix4Dmapper 4.5.2 专业影像处理软件进行图像拼接,基本处理过程包括:初步处理、空三加密以及数字表面模型和数字正射影像图的生成。
2.3 水库实地测量数据
2019年10月23 日早上,在张山水库进行无人机成像采集之后,同步采集了水库水样,并于当天下午送往新马桥实验站进行采样数据的分析,该研究共设置采样点6 个,每个采样点同时采集10 个数据,这些测量数据主要为后续建立回归模型提供水质参数。
3 方法
3.1 窗口平均算法(WAM,WINDOW AVERAGE METHOD)
窗口平均算法(WAM 算法)需要一个n×n 的缓冲窗口,n 的值需要改变,通过计算不同窗口大小的像元平均值来寻找最佳匹配。
3.2 线性回归模型
采用对数变换的水质参数与波段比之间的线性回归模型,如下所示:

式中:X 是波段比值;Y 代表水质参数;a 与b分别代表系数和偏差。该研究使用Pearson 的卡方检验(chi-squared test)来检验相关系数的统计显著性。
4 结果与结论
4.1 水质参数拟合结果
对UAV 影像做预处理得到多光谱的图像之后,再应用平均窗口算法建立水质参数和光谱特征值之间的回归模型。建模结果如下所示。
WAM 算法考虑了五种情况,分别在不同n×n 大小的窗口内取平均值,n 值设置5、9、19、49、99, 分别代表0.35×0.35m2,0.63×0.63m2,1.33×1.33m2,3.43×3.43m2,6.93×6.93m2范围内的波段反射比平均值,ln(NIR/R)与ln(TN)的相关分析结果见表1。Pearson 系数的r 值为正与文献资料预期一致,19×19 像元窗口的平均可得到最优的回归模型,99.5%的ln(TN)能够被ln(NIR/R)解释。
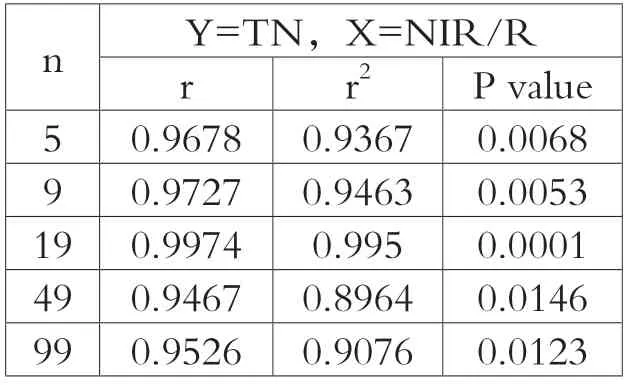
表1 用WAM 算法对ln(NIR/R)与ln(TN)做相关回归拟合表
表2列出了ln(Tp)、ln(COD)与ln(NIR/R)、ln(Red_edge/G)之间的相关分析结果,发现ln(NIR/R)、ln(Red_edge/G)与ln(Tp)均呈正相关,ln(NIR/R)与ln(COD)呈负相关。如果忽略未考虑的水质参数(如悬浮物质泥沙、藻类等)对COD 的影响,则认为总氮总磷是影响化学需氧量的唯一因素。不幸的是,-0.702 是表2中最高的Pearson 系数,但负相关性与文献资料中的假设不一致。其中,0.2696 皮尔逊系数和0.2727 皮尔逊系数是ln(Tp)与ln(NIR/R)、ln(Red_edge/G)关系的最优解,却仅解释了7.27%和7.44%的Tp。

表2 用WAM 算法对ln(NIR/R)、ln(Red_edge/G)与ln(TP)、ln(COD)做相关回归拟合表
由最大像素窗口覆盖的地面区域(99×99),近似等于卫星图像的一个像素所覆盖的面积,因此UAV 图像比卫星影像具有小得多的最小映射单元。然而像元窗口内值转换为单个平均值可能涉及混合像元问题,这会妨碍回归模型拟合。例如,在表2中,相关性会随着窗口的增大呈由弱到强再到弱的趋势,说明较大的像元窗口是可能遭受到比较小的像元窗口更大的混合像元影响,从而导致对数转换之后的波段比值与水质参数(Tp、COD)之间的相关性降低。
WAM 算法的结果表明,在五种情况中,最优解的窗口平均大小为19×19 即对应实际地面面积为1.33×1.33m2的情况,这与遥感影像波段比值所作结果相一致。此外,WAM 算法适宜于建立TN 与NIR/R 之间的线性回归,但不适用于其他水质参数与对数波段比值建立回归模型。
4.2 结论
该研究结果表明,与传统的摄影测量以及卫星遥感数据相比,无人机图像的精细时空分辨率可以有效规避天气对航空成像的负面影响。在得到更有效结果的同时,相比传统遥感数据,无人机在小型水库的水质状态估算过程中也提供了性价比更高的解决方案。该实验已经证明,无人机成像技术可以应用于小型水库的水质参数估算。
建立合适的回归模型对于遥感数据在水质监测中的应用通常很困难。该研究使用的WAM 算法,是一种匹配最佳回归模型的方法。研究结果表明,WAM 算法在估算总氮水质参数时效果较好,在估算总磷和化学需氧量水质参数方面效果较差。
目前,该研究只实现了单个时段的水质参数估算,但水库的管理和监测以及对水资源的可持续规划需要长时间的跟踪监测。因此,还需要寻找适合的方法实现长时间序列的水质参数估算■
猜你喜欢
中国三峡(2022年6期)2022-11-30
北京航空航天大学学报(2022年8期)2022-08-31
航天返回与遥感(2022年2期)2022-05-12
黑龙江大学自然科学学报(2022年1期)2022-03-29
建材发展导向(2021年10期)2021-07-16
空间科学学报(2021年1期)2021-05-22
知识就是力量(2019年9期)2019-09-09
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
电子制作(2017年8期)2017-06-05
