
基于模糊PID的叉梳式立体车库电机调速研究
2022-06-08 01:41郭秀荣郑立文杜丹丰
中国新技术新产品 2022年4期
郭秀荣 郑立文 杜丹丰
(1.东北林业大学机电工程学院,黑龙江 哈尔滨 150040;2.东北林业大学交通学院,黑龙江 哈尔滨 150040)
0 引言
随着汽车保有量的增加,城市道路停车位紧缺,停车难问题已成为影响城市发展的重要因素之一,而新型的立体停车库可以有效地解决停车难题。然而,现有的立体停车库设备操作复杂、控制系统不稳定,因此研究立体车库的控制系统尤为重要。
该文以叉梳式立体车库升降机构电机控制系统为研究对象,探讨立体车库的电机控制方法。作为立体车库的控制核心,电机控制系统对立体车库的性能起关键作用,影响立体车库的工作效率。传统PID 控制也可以对电机进行控制,从而达到所需的精度,但电机的响应速度较慢,立体车库控制系统效率不高。郑清铭等人对同步电机结构模态进行研究,分析电机模态阶数以及模态频率的仿真结果,并进行相关试验。杨晓玫等人针对无刷直流电机使用了双闭环PID 控制,该模型能够较好地达到所需精度,但电机系统在传统的PID 控制算法下难以达到同步运行的精度。
基于上述研究现状,利用模糊PID 控制器对叉梳式立体车库电机系统进行研究,探讨模糊PID 控制方法,以期对叉梳式立体车库电机系统速度进行同步调节,提高叉梳式立体车库存车、取车的效率。
1 立体车库结构及电机控制系统
1.1 叉梳式立体车库结构
叉梳式立体车库主要由升降机构、横移机构、钢架结构以及各种检测装置元件等组成,叉梳式立体车库的结构简图如图1 所示。叉梳式立体车库的工作原理为叉梳式立体车库中间的叉梳臂升降台通过钢丝绳进行提升或者下降,叉梳臂升降台上的汽车可以沿垂直方向上升或者下降,汽车也可由横移电机驱动的叉梳载车板在水平方向上移动,如果需要存取汽车,则可利用叉梳臂升降台和叉梳式载车板梳齿之间的交叉结构对汽车进行存取。

图1 叉梳式立体车库结构简图
1.2 电机控制系统结构
叉梳式立体车库的电机控制系统的结构示意图如图2所示。PLC 控制器作为叉梳式立体车库的控制核心,它可以控制电机的运转速度。电机的速度控制是一种对转速进行闭环控制的系统,旋转编码器可以检测电机的转速,并将旋转编码器检测出来的脉冲信号送回PLC 控制器,然后进行计数以及计算电机转速差,通过变频器调整异步电机工作电源的频率和电压,使异步电机的转速调整到一个稳定值。

图2 电机控制系统结构
2 系统软件设计
2.1 PID控制
PID 控制器可以被应用在各种场合,其也能对电机速度进行调节控制,PID 控制算法的微分方程如公式(1)所示。

式中:()为输出信号;()为反馈变量;K为比例系数;K为积分系数;K为微分系数。
2.2 控制器设计思路
由于立体车库所存取车辆的尺寸大小不一样,因此在存取汽车过程中,质量会发生变化,立体车库控制系统需要不断调整控制器参数,以控制电机平稳、快速地运行,并对叉梳式立体车库电机的运行速度进行同步调节。当立体车库运行时,通过传感器和PLC 高速计数模块不断检测计算速度的偏差量和速度差变化率的变化值,并利用设计好的模糊控制关系对计算测量的数据进行模糊化处理,从而对PID 控制器参数进行调整,根据PID 控制器计算调整好的PID 参数就可以得出变频器的调整频率值,从而对电机速度进行同步调节,模糊PID 控制原理如图3 所示。

图3 模糊PID 控制原理图
2.3 模糊PID控制器设计
模糊控制是一种通过模仿生产人员的实际操作经验的规则控制。对叉梳式立体车库电机系统进行分析,选取模糊控制器的输入参数为叉梳式立体车库电机速度差和速度差的变化率e,设定模糊控制的输出参数为K、K以及K。设定输入、输出变量的论域为[-6,6]。使用7 个模糊语言变量进行描述,分别为负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)以及正大(PB)。根据隶属函数的特性要求,采用三角型隶属度函数,如图4 所示。
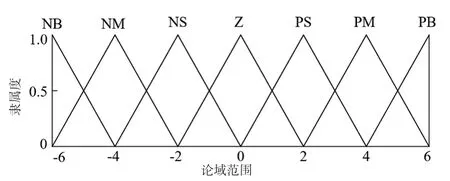
图4 输入、输出三角隶属度函数示意图
当叉梳式立体车库运行时,因为不同的运行工况会导致3 个参数K、K以及K发生变化,所以需要控制PID 参数的选取范围,建立模糊规则库对PID 参数进行调整,详细数据见表1。
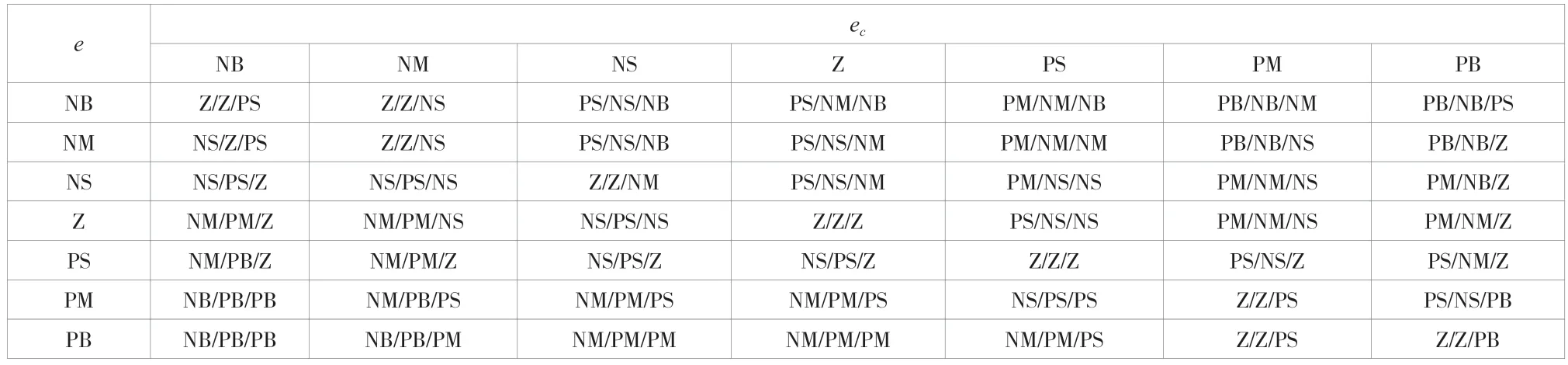
表1 模糊规则表
以模糊规则为例,得到模糊推理曲面观测图如图5 所示,图5 的曲面基本平整,满足模糊规则要求。

图5 模糊推理输出曲面观测图
3 模糊PID控制器的仿真与试验验证
3.1 模糊PID控制器的仿真
针对叉梳式立体车库控制系统,在MATLAB 中建立模糊PID 控制器的对比模型进行仿真。利用试凑的方法,根据顺序分别计算K、K以及K,将计算得出的3 个参数代入模糊PID 控制器,并设定仿真时间为3 s,仿真得到的曲线图如图6 所示,在阶跃信号下,模糊PID 控制具有更快的响应速度,可以达到预期的稳定效果。
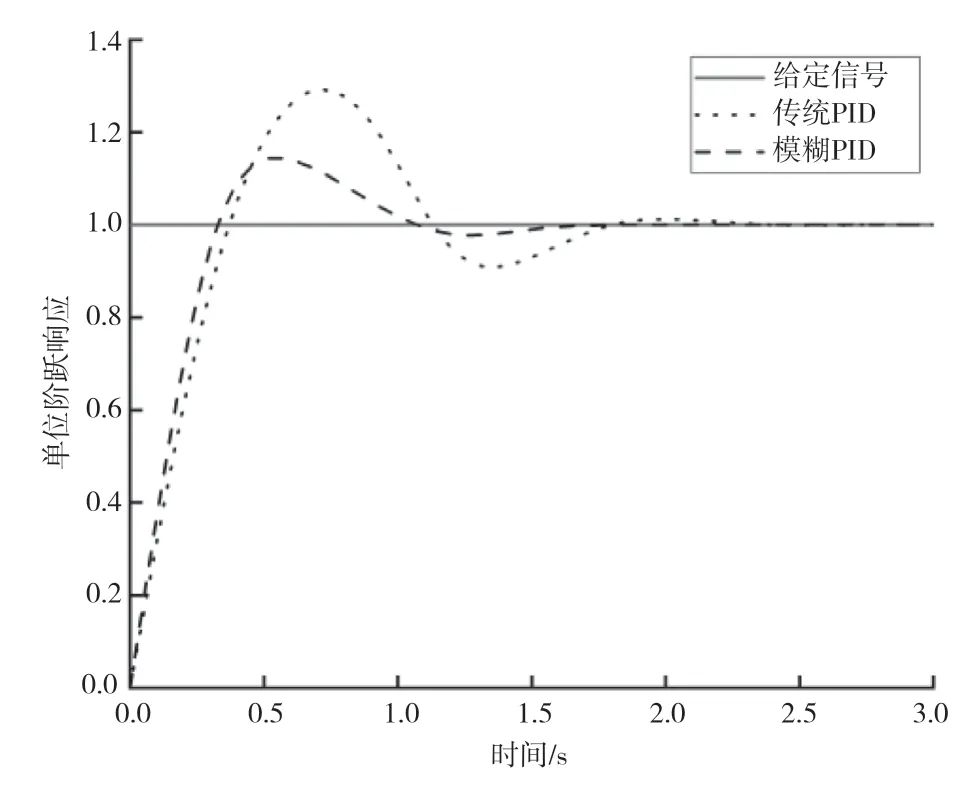
图6 阶跃响应仿真对比图
由此可知,对PID 控制器自整定的PID 参数来说,当控制系统的参数因外界因素而产生变化时,由PID 控制器控制的系统会更容易出现震荡现象,而且控制系统的震荡幅度比模糊PID 控制更大,因为控制系统的本身也存在参数和结构的不确定性,所以需要使用模糊PID 控制对控制系统的参数进行调节,在模糊PID 控制策略下,控制系统的稳定性更好。
3.2 模糊PID控制器性能测试
为验证模糊PID 控制器的调速性能,搭建叉梳式立体车库样机进行试验,由于实际的立体车库成本过高,因此设计了如图7 所示的3 层的叉梳式立体车库样机。叉梳式立体车库样机所用异步电机的额定转速为1 440 r/min。

图7 叉梳式立体车库样机图
在开展叉梳式立体车库试验的过程中,给变频器和PLC控制器分别接入24 V 直流电源和220 V 交流电源,将软件程序下载到PLC 控制器并进行调试。模糊PID 控制系统中的速度测量反馈系统由旋转编码器和PLC 的高速计数模块组成。以叉梳式立体车库升降机构为研究对象,在模糊控制系统工作过程中,通过安装在升降机构电机主轴的旋转编码器测得当前速度,经过计算可以得出速度差和速度差的变化率e,然后经过模糊处理得到输出值,再通过PID 控制器将其输出到变频器,变频器调整频率,以控制电机运转。
由图8 可知,随着变频器频率的升高,梳式立体车库升降电机转速升高,叉梳臂升降台速度也随之上升,此时立体车库升降机构给定速度由0.0 m/s 上升到0.4 m/s,而反馈速度须在模糊PID 控制器下才能快速地同步调速到对应的速度值,最终使实际运行速度与给定速度基本保持一致,速度反馈最大间隔时间为0.425 s,最大误差不超过1%。试验调试结果表明,设计的模糊PID 控制器可以对立体车库电机系统进行同步调速,且叉梳式立体车库样机运行稳定。

图8 速度跟踪曲线
4 结论
针对叉梳式立体车库存在电机速度响应问题,该文提出了一种利用模糊PID 控制对叉梳式立体车库电机速度进行调节的控制系统,建立了基于模糊PID 控制器的对比仿真模型,还搭建了叉梳式立体车库样机进行测试,得出如下结论:1)根据仿真结果可知,模糊PID 控制器调节立体车库控制系统的参数的速度更快,动态响应小,并且具有较高的可靠性和稳定性。2)样机调试结果表明,设计的模糊PID 控制器可以对叉梳式立体车库电机系统进行同步调速,且叉梳式立体车库样机可以稳定运行。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
防爆电机(2020年3期)2020-11-06
中国特种设备安全(2019年4期)2019-05-20
测控技术(2018年5期)2018-12-09
电子制作(2017年7期)2017-06-05
电子制作(2017年2期)2017-05-17
时代农机(2016年6期)2016-12-01
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
环境科技(2015年4期)2015-11-08
