一种基于散射路径识别匹配的散射体定位算法
2022-06-11 00:47焦旸,邓平
通信技术 2022年5期
焦 旸,邓 平
(西南交通大学,四川 成都 611756)
0 引言
随着无线通信技术的发展和物联网在各行业的推广应用,智能终端及设备逐渐普及,基于位置的服务(Location-Based Services,LBS)已成为定位导航、应急搜救、抢险救灾的必备功能[1,2]。在进行无线定位的过程中,定位结果往往会受到各种影响因素不同程度的干扰,其中非视距传播是最为主要的误差来源[3]。在视距环境下,现有的定位算法都具有很高的定位精度,其精度可达到厘米级甚至毫米级[4]。但在现实生活中,环境复杂多变,在某些定位环境下可能存在障碍物,这就形成了非视距环境。移动台和基站之间存在各种障碍物,导致信号只能通过折射或反射来传播,从而产生非视距(Non Line of Sight,NLOS)误差[5]。当移动台和基站之间存在NLOS传播时,如果不对信号进行任何预处理,而直接采用信号NLOS传播的测量信息来进行定位,将会造成定位精度下降,甚至导致定位失败。因此,在NLOS环境下,综合多种定位技术与算法提高定位精度是目前定位技术研究的一个 重要方向。
如今对于NLOS环境下的定位问题已经有了大量的研究,但大多数的研究重点在于如何区分NLOS信号与视距(Line of Sight,LOS)信号,仅仅利用纯粹的LOS信号,即抛弃或抑制了NLOS信号,来进行定位。文献[6]中描述的此类算法在没有任何LOS信号的情况下,即完全的NLOS环境下,定位效果极差。近些年,一种基于散射体的定位算法进入研究者的视野,该算法通过充分利用NLOS环境下散射体提供的信息对目标进行定位。该算法可归为基于散射体几何信息的定位算法和基于虚拟基站的定位算法两类。文献[7]说明了基于散射体几何信息的定位算法大多是根据散射体模型的差异,通过接收到的到达时间(Time of Arrival,TOA)、到达角度(Angle of Arrival,AOA)、发射角度(Angle of Departure,AOD)等测量值,以及散射体、基站和移动台之间的几何位置关系,建立相应的方程式,然后利用约束条件以及最小二乘法或者最大似然估计等检测估计方法,求得移动台的位置;然而,由于约束条件范围以及测量精度等问题,此类方法也会在求解过程中产生较大的误差。文献[8]阐述了基于虚拟基站的定位算法是利用测量得到的数据求得散射体的位置,然后把散射体作为一个虚拟基站,从而把NLOS环境转换为LOS环境,利用当前已经相当成熟的视距定位算法来进行求解。
基于虚拟基站的定位算法首先需要对散射体进行准确定位,为此本文提出了一种NLOS环境下基于路径识别与匹配的散射体定位算法。本文算法先根据基站接收到的传播路径信号测量参数,利用一种新的基于目标可能位置线(Line of Possible Mobile Device,LPMD)的单次散射路径识别匹配算法对单次散射路径进行识别与匹配;然后使用改进的基于到达时间差/到达角(Time Difference of Arrival/Angle of Arrival,TDOA/AOA)的数据融合定位算法对散射体进行定位;最后,当获得了具有较小定位误差的散射体时,进一步利用视距环境下的定位算法,就能得到较小定位误差的移动目标。
1 基于LPMD线的单次散射路径识别匹配
1.1 LPMD模型
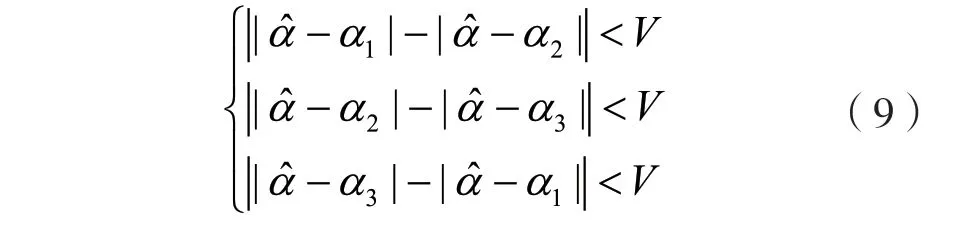
LPMD模型[9]是根据无线信号的测量参数,包括TOA、AOA和AOD,建立的移动目标(Mobile Station,MS)、散射体(Scatterer,S)以及定位基站(Base Station,BS)之间的几何模型。假设信号是经过单次散射的,图1为LPMD模型,其中α代表信号到达角度,β代表信号发射角度。信号从MS出发经过S散射到达BS,由此可以得到散射体S在以BS为起点并且角度为α的延长线上,同时BS与S之间的距离小于TOA测量值所对应的传播距离。进一步通过MS与S之间的距离以及AOD测量值,取得MS的位置。由于散射体的位置未知,根据不同散射体的位置可以得到对应的移动台位置,将不同的移动台位置进行连线可以获得一条移动台可能位置线,即LPMD。

图1 LPMD模型
1.2 单次散射路径识别匹配算法
文献[10]介绍了一种单次散射路径识别匹配算法,该算法在移动台与基站的距离相隔较远并且散射体分布在移动台附近时,通过角度的特征发现当角度的误差保持不变的时候,距离相隔越长由于角度的误差产生的位置偏移量越大;因此,算法中直接利用两个基站的AOA求得一个中间位置散射体进行距离判决,将会有很大的不稳定性。于是本文利用了一种新的基于LPMD线的单次散射路径识别匹配算法,对文献[10]当中的算法进行改进以及优化,去掉原有算法当中的距离判决,减少多次门限判决所产生的误差,进一步优化散射体与移动台的估计位置,从而达到更好的识别效果。
在NLOS环境下,如果不同基站接收的单次散射路径来自同一散射体,则在理想情况下,单次散射路径具有相同的散射半径和发射角,但因为噪声的影响,特别只是先利用两条单次散射路径的AOA值求解散射体位置,再利用估计的散射体位置求解散射半径时,误差也较大,而角度误差相对较小。图2展示了MS到各个基站的NLOS传播路径以及各个基站所对应的LPMD。假设非视距传播过程只经过了单次散射,参与到定位的基站BSi的坐标为(xi,yi)T,散射体S的坐标为,移动台MS的坐标为,αi为MS的发射角AOD,β为BS的到达角AOA,ri为信号到达时间TOA所对应的传播距离。由LPMD模型,可以根据基站测量得到的TOA、AOA和AOD值获得LPMD线及其上下端点,即基站BS1,BS2,BS3对应散射体S的单次散射路径LPMD线:线段AB、线段CD和线段EF。

图2 算法定位场景
首先根据LPMD线估计MS位置,这里通过二次估计法得到最终的MS估计位置,假设根据LPMD线能得到M个MS估计位置,则MS最初估计位置为:

为了对MS的位置进一步求精,需要排除误差较大的位置。求出每个MS估计坐标到MS最初估计位置的距离li,并求出距离li的均值avg_l,表达式分别为:


将不满足距离li小于平均定位误差avg_l的MS估计位置剔除掉。假设满足条件的MS估计位置有N个,那么将对MS的初始估计位置进行更新:
接着根据基站坐标和AOA测量值估计散射体位置,这里需要对估计位置进行加权系数的计算获得较精准的散射体估计位置。首先定义定位结果与测量值之间的残差:



根据估计的MS位置与估计的散射体位置,可估计出发射角AODα^为:

在没有噪声的情况下,估计的发射角α^与各个单次散射路径的发射角α1,α2和α3是相等的,但现实情况下存在一定的误差,需要设置角度阈值V进行判决,即:
符合上述条件的情况,即认为单次散射路径来自同一散射体,反之则不匹配。
1.3 角度判决门限值的选取
由于要对单次散射路径进行识别与匹配,各个基站会接收到来自多个散射体的信号,将不同基站所对应的单次散射路径进行组合,在算法中进行匹配从而计算出识别率。本文中的识别率表示在多条单次散射路径中识别正确的概率,因为在之后定位散射体的过程中会利用到TDOA相关的定位算法。根据基本TDOA定位算法原理[11],参与到定位中的基站至少需要3个,从而设定3条单次散射路径为一组进行匹配。
假设散射体按照圆环模型且散射半径为400 m生成,TOA、AOA与AOD的误差均服从N(0,12),研究本文算法中的角度门限取值对漏警概率以及虚警概率所产生的影响,结果如图3所示。

图3 角度门限值对漏警/虚警概率的影响
在本文算法中,将选择漏警概率与虚警概率[12,13]的和为最小值时所对应的角度值,当作算法的角度判决门限值。从图3的实线可以得到,在门限取值为2°的时候,漏警概率加上虚警概率的和为最小值。因此,本文算法中的角度判决门限值取2°。
2 散射体定位算法
在完成了对单次散射路径的识别与匹配后,假设有M个经由同一个散射体的基站,MS的坐标表示为(x,y),S的坐标表示为(xs,ys)且分布在MS的附近,各个基站BSi的坐标分别表示为(xi,yi),其对应接收到的TOA测量值与AOA测量值分别表示为ti与αi,单次散射场景如图4所示。
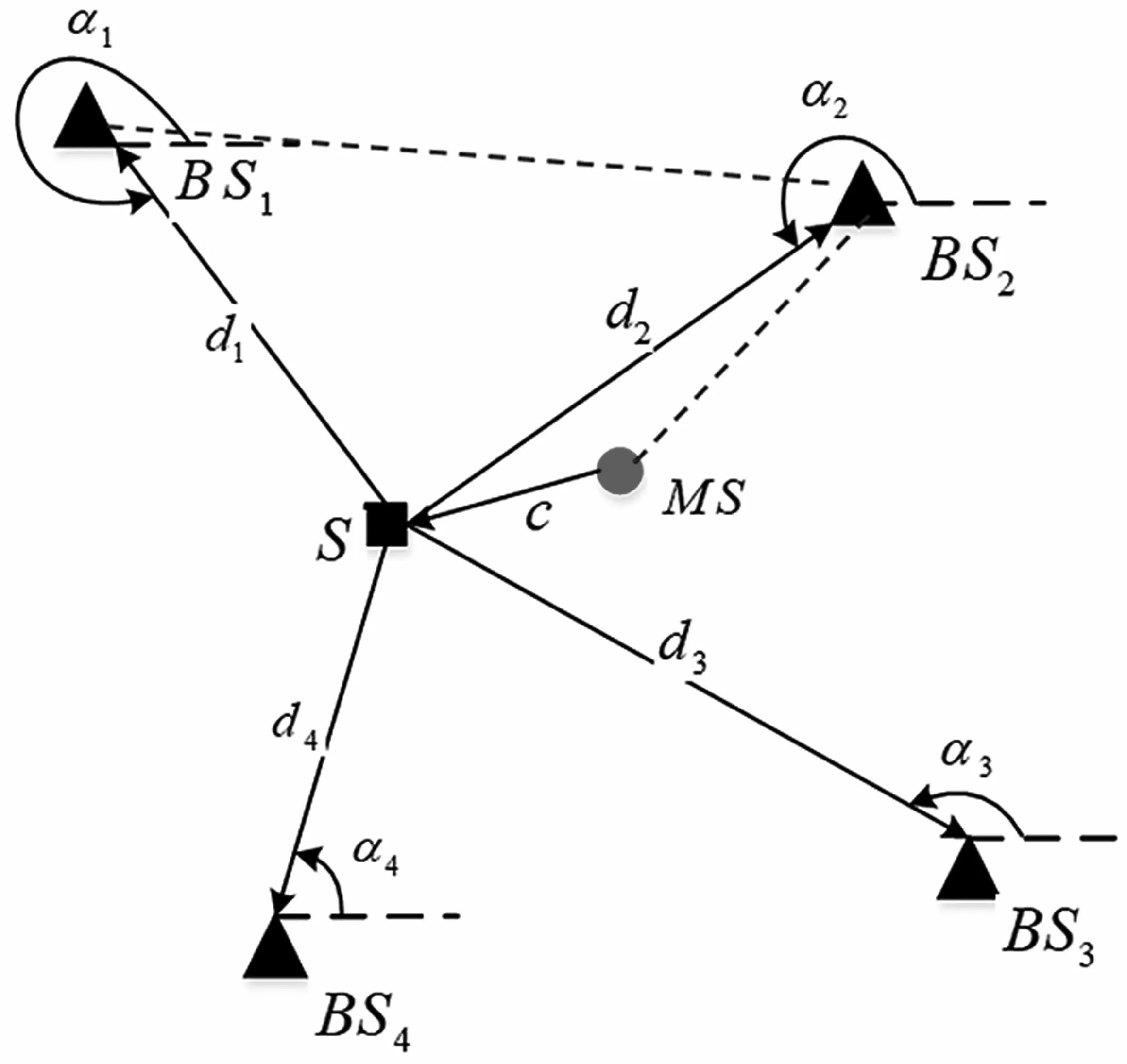
图4 单次散射场景
在理想的情况下,如果多个基站都经由同一个散射体传播信号,可以视为多条单次散射路径有相同的散射半径,即散射路径中散射体到移动台的距离是相等的。
2.1 基于TDOA/AOA的散射体定位算法
在成功识别与匹配了单次散射路径的情况下,可以使用基于TDOA/AOA的数据融合算法对散射体进行定位。
假设散射体到第i个基站之间的距离为di,i=1,2,…,M,可以得到各个基站接收到的TOA测量值对应的传播距离表示为ti=di+c,距离di与散射体到移动台之间的距离c可以分别表示为:

根据移动台的散射半径相同,即散射体S到移动台MS之间的距离相等这一条件,假定基站1是服务基站,则第i个基站与服务基站之间的TOA值对应的距离之差表示为:

进一步,di,1可表示为:

将式(13)化简可以得到:

式中:xi,1=xi-x1;yi,1=yi-y1;
基站接收到的AOA测量值αi表示为:

将式(15)中i=1的情况与式(14)相结合,组成一个包含M个线性方程的方程组,对散射体S的坐标进行求解。进一步,建立误差矢量方程,通过两次加权最小二乘计算出散射体S的最终定位 结果:

式中:为未知矢量zs=(xs,ys,d1)T的第2次加权最小二乘计算结果。
2.2 改进的散射体定位算法
为了提高散射体定位精度,将对散射体定位算法进行优化,考虑TDOA的单次散射场景如图5所示。在图5中,di表示各个基站到散射体之间的LOS距离,ti,1表示各个基站与服务基站之间TDOA测量值所对应的距离,Lij,i,j=1,2,…,M(i≠j)表示基站之间的测量距离。定位过程中可能出现TDOA测量值大于对应的两基站之间测量的距离,即:

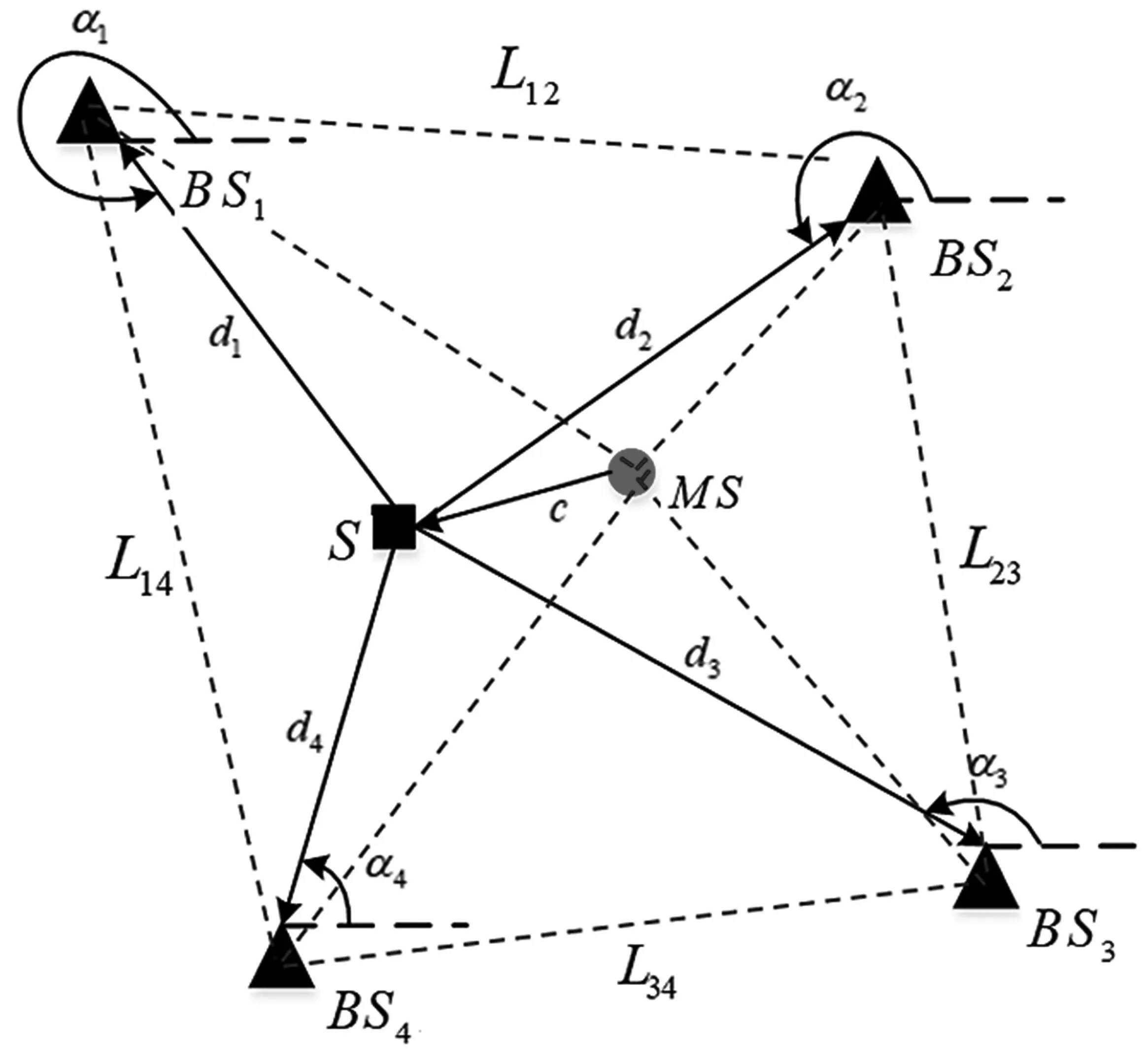
图5 考虑TDOA的单次散射场景
根据三角形两边之差小于第三边的几何关系,式(17)违背了三角形定理,代表TDOA测量值具有较大的误差,散射体的定位精度也会随之降低。当出现此类情况的时候,将强制调整TDOA测量值对应的距离等于对应的两基站之间测量的距离,即ti,1=Li,1,由此来减小基站之间的TDOA误差。
考虑散射体坐标的单次散射场景如图6所示。图6中根据基站坐标与其对应的TOA测量值、AOA测量值可以得到一条线段以及线段的两个端点BSi以及Pi,理想状况下散射体位于线段当中,散射体的横坐标与纵坐标应分别在两端点横纵坐标的开区间内,各个基站所对应的线段都应满足条件:

图6 考虑散射体坐标的单次散射场景

式中:(xs,ys)为散射体的定位坐标;(xpi,ypi)为P点的坐标。如果式(16)中的值不符合条件式(18),则将当前获得的值舍弃。假如模糊值中两个值都满足条件,选择定位到的散射体与基站水平方向的夹角和AOA测量值最接近的值作为最终结果。
在估计了散射体的位置之后,还需要对散射体S与基站之间的连线与基站水平方向的夹角进行约束。考虑到达角度的单次散射场景如图7所示,图中根据基站坐标以及各个基站对应的TOA测量值作出了多条与基站对应的圆弧,圆弧之间会形成多个交点,即Aij,i,j=1,2,…,i≠j。通过信号传播模型可以得知散射体S到基站之间的距离一定小于基站所对应的TOA测量值相应的距离,因此散射体S与基站之间的连线和基站水平方向的夹角值一定在一个区间当中,即:

图7 考虑到达角度的单次散射场景
式中:θAij为多个圆弧的交点到基站的角度。如果定位出散射体S的坐标不满足式(19),则将当前的定位结果舍弃。
3 仿真结果及分析
为了验证本文中算法的识别性能以及定位性能,采用对比分析实验法对本文中的算法进行仿真分析。假设蜂窝半径R为2 000 m,参与定位的基站的坐标为BS1(0,0),,移动台MS的坐标为(R/2,R/2),散射体个数为4个。TOA、AOA和AOD测量值的误差均为加性白噪声且服从高斯分布。同时TOA的距离误差单位是米(m),AOA和AOD的误差单位是度(°)。
3.1 不同单次散射路径识别匹配算法性能对比
将本文提出的新的基于LPMD线的单次散射路径识别匹配算法,与基于AOA/TOA的单次散射路径识别匹配算法[14]和文献[10]中的单次散射路径识别匹配算法进行识别性能的对比分析。
假设仿真完全是在非视距环境下进行的,没有视距路径信号的存在。随机选择4个基站接收来自散射体1的信号,其余基站分别接收来自散射体2、散射体3和散射体4的信号。默认散射半径为400 m,TOA、AOA和AOD测量值的误差均服从N(0,12)。分析算法在圆盘散射(Disk of Scatter,DOS)模型以及圆环散射(Ring of Scatters,ROS)模型中,不同散射半径、不同TOA误差以及不同AOA误差对识别性能的影响。仿真结果如图8、图9、图10所示。

图8 不同散射半径下算法的识别率

图9 不同TOA测量误差下算法的识别率

图10 不同AOA测量误差下算法的识别率
如图8所示,在同样的条件下,本文算法的识别率最高,并且随着散射半径的增大,识别率几乎保持不变,表明本文算法具有较高的稳定性。图9中,随着TOA误差的增大,不同算法的识别率均几乎不变,本文算法中没有涉及距离判决,所以不受TOA噪声的影响。图10中,随着AOA误差的递增,本文算法的识别率几乎保持不变,其他算法通过AOA测量值直接估计散射体位置,使得距离判决有较大的误差,导致识别率降低。同时圆环模型下的识别性能优于圆盘模型下的识别性能。
3.2 散射体定位算法性能比较
当散射半径越大时,非视距误差也会越大,进一步导致定位精度降低,而且在圆环模型中出现散射半径较大即NLOS误差较大的概率是比圆盘模型大的,因此本文在定位过程中都采用圆盘模型进行研究。选取前4个基站参与到定位过程中,假设TOA的误差服从N(0,12),AOA的误差服从N(0,12),散射体根据圆盘模型且散射半径为200 m生成。分析散射体定位算法的累积分布函数(Cumulative Distribution Function,CDF)曲线。
图11中改进的散射体定位算法的定位误差在 2 m以下的概率达到了93.45%,同时定位误差在 3.47 m之下的概率达到100%,对比算法误差在2 m之下的概率为91.94%。可以得出,本文算法能对散射体进行精准的定位,并且定位精度也有一定的提升。
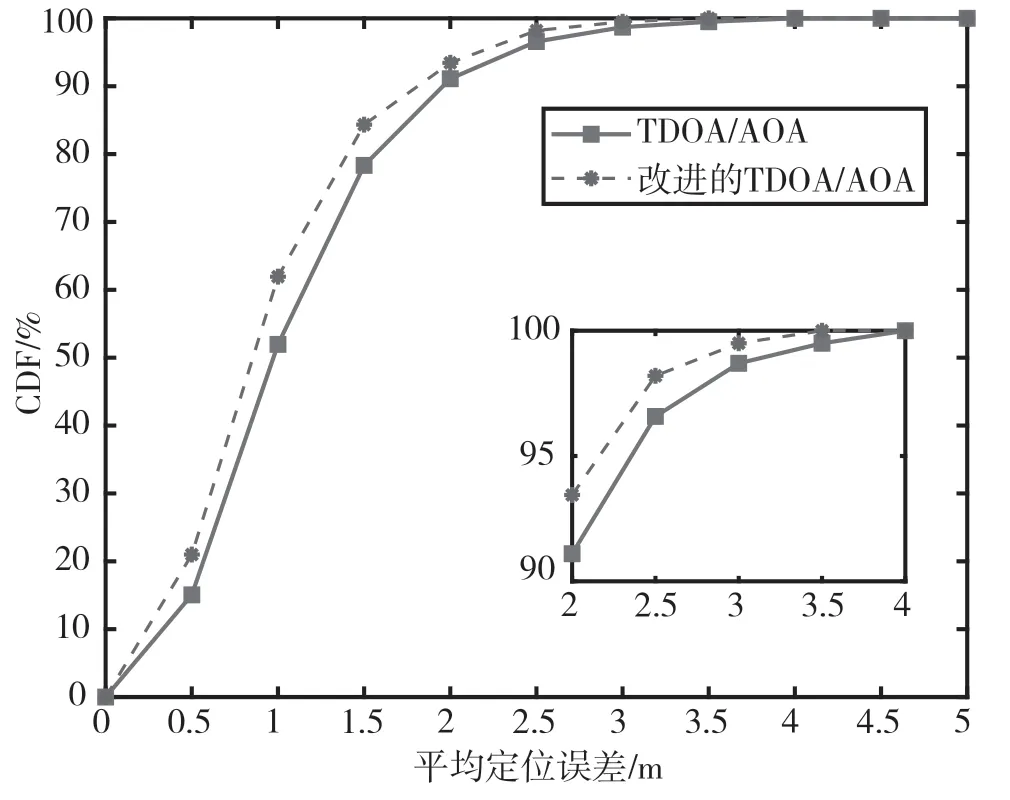
图11 不同算法的误差累积概率分布函数曲线
3.3 不同环境对定位性能的影响
将本文改进的基于TDOA/AOA的散射体定位算法与基于TOA/AOA的散射体定位算法[14]、改进前的散射体定位算法以及散射体定位误差的克拉美罗下界(Cramer-Rao Lower Bound,CRLB)[15]进行仿真分析。
选取前4个基站参与到定位过程中,默认散射半径为300 m,TOA与AOA测量值的误差均服从N(0,12),分析算法在圆盘模型中不同TOA误差、AOA误差、散射半径以及基站数目对算法均方根误差(Root Mean Square Error,RMSE)的影响。实验结果如图12、图13、图14、图15所示。
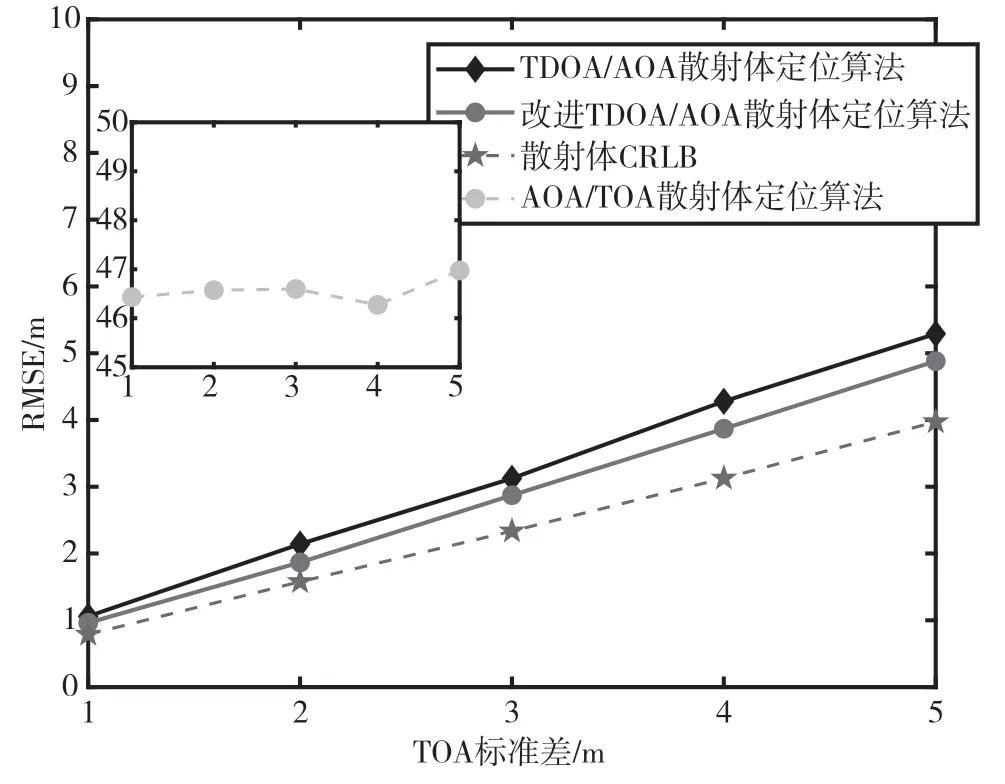
图12 不同TOA测量噪声的算法性能
图12中随着TOA误差的增大,本文算法的定位误差逐渐增大,但依旧将误差控制在5.24 m以下。图13中随着AOA误差的增大,本文算法的定位误差几乎保持不变,这是由于在对散射体进行定位的过程中仅仅用到了一个服务基站的AOA测量值,因此AOA误差对算法近似于没有影响。图14中随着散射半径的增大,本文算法的定位误差有轻微的提升,但是并不明显,这说明该算法的稳定性较高,受散射半径的影响较小,对比算法的稳定性较差。图15中随着基站数目的递增,不同算法的定位误差都随之降低,这说明参与到定位的基站数目增加能提高定位的精度。此外,改进的散射体定位算法仿真结果最接近CRLB。
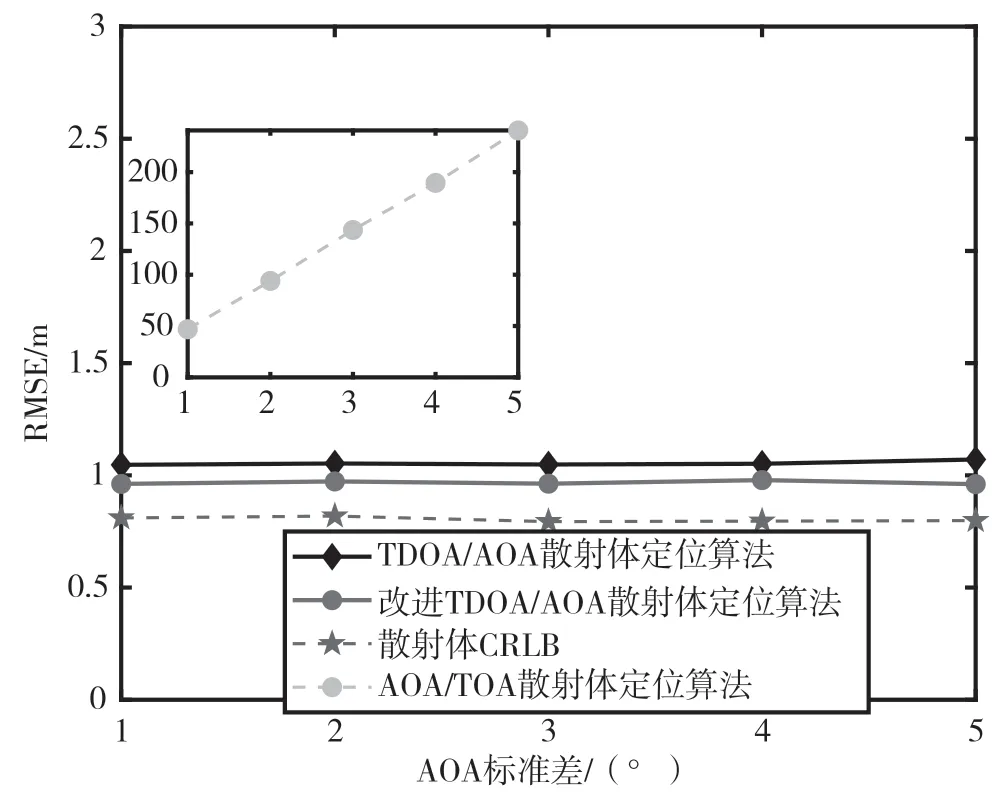
图13 不同AOA测量噪声的算法性能

图14 不同散射半径的算法性能

图15 不同基站数目的算法性能
4 结论
本文提出了一种NLOS环境下基于路径识别与匹配的散射体定位算法。针对NLOS传播环境下散射体定位精度较低的问题,首先,结合LPMD模型原理以及多个基站接收到的无线信号的测量参数,提出了一种新的基于LPMD线的单次散射路径识别匹配算法,该算法对单次散射路径进行识别与匹配,将经过同一个散射体的单次散射路径进行分类;其次,在此基础上结合来自同一个散射体的NLOS路径中散射体到移动台的距离相等这一特征,利用改进的基于TDOA/AOA的数据融合定位算法在NLOS环境下对散射体进行定位。实验结果表明,本文的单次散射路径识别匹配算法识别率均在90%以上,并且本文散射体定位算法的定位误差也能控制在3.47 m之内,同时本文算法的识别性能以及定位性能相较于对比算法都有一定程度的提升,为进一步将散射体当作虚拟基站,并在LOS环境下精确定位移动台打下了良好的基础。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26
中山大学学报(自然科学版)(中英文)(2021年4期)2021-09-10
无损检测(2019年11期)2019-11-20
中国听力语言康复科学杂志(2019年3期)2019-06-24
听力学及言语疾病杂志(2019年3期)2019-05-24
中等数学(2018年8期)2018-11-10
中国高新技术企业(2017年5期)2017-05-05
物联网技术(2016年11期)2017-01-12
中国海洋大学学报(自然科学版)(2017年4期)2017-01-12
计算机辅助工程(2016年5期)2016-11-25