
石油管道盗取定位中的时延估计算法
2022-06-11 06:33罗乐于玲
电脑知识与技术 2022年13期
关键词:主成分分析
罗乐 于玲

摘要:针对低信噪比环境下时延估计精度不足导致石油管道盗取定位不准确的问题,提出了一种PRLS自适应滤波时延估计算法。该算法首先利用主成分析法良好的降噪能力对信号进行预处理,接着对预处理后的信号进行最小二乘自适应滤波来进一步提高信噪比,然后对滤波后的信号进行二次互相关时延估计,最后进行三次样条插值,能够有效提升了算法在低信噪比环境下的鲁棒性。仿真实验表明,在信噪比为低于-10dB时,所提出的算法误差不高于0.0995个采样点,定位误差不大于0.334千米,能够获得较为精确的石油管道盗取点的位置。
关键词:时延估计;主成分分析;最小二乘自适应滤波;二次互相关
中图分类号:TN911.7 文献标识码:A
文章编号:1009-3044(2022)13-0109-04
时间延迟估计(TDE)是石油管道盗取定位中的基础一环。在被动探测定位技术中,石油管道盗取定位通常利用石油管道周围发生的异常事件信号到达两个检测器之间的时间差对盗取点进行定位。由此看出石油管道盗取点的定位误差取决于时延估计的精确度。最简单易行的方法是基本互相关法,但该算法在低信噪比环境下估计误差较大。而广义互相关法(GCC)[1-2]使用较为广泛,更具实用性,性能优于基本互相关法。PHAT加权能使算法峰值更尖锐 [3-4],但也易受到噪声的干扰。目前针对噪声干扰对时延估计精度影响的问题,现有的时延估计改进方法有基于改进加权函数的广义互相关法,在信号功率较小时也能得到尖锐的相关峰[5];快速二次相关时延估计法,能够快速有效的估计出时延值[6];最小均方(LMS)自适应滤波时延估计算法,能有效地消除噪声[7];基于三阶累积量的时延估计算法,该算法有效地抑制了高斯噪声的影响,在非高斯噪声和相关噪声的情况下,该算法也能获得较好的估计性能[8];基于最大相关熵准则和拉格朗日分数延迟滤波器(FDF)的分数时延估计算法,该算法在高斯噪声和脉冲噪声环境下均有很好的性能[9];基于加权相关熵谱密度的时延估计算法,该方法基于相关熵理论,通过频域加权处理进一步增强了算法的抗噪声能力,在脉冲噪声下效果良好[10];还有基于集合平均经验模态分解(EEMD)滤波和二次相关时延估计[11]和基于最小二乘(RLS)自适应滤波算法的广义互相关时延估计方法[12]等。这些算法均在一定程度上提高了时延估计算法的鲁棒性。本文针对低信噪比环境下时延估计定位精度不足导致石油管道盗取定位不准确的问题,提出了一种PRLS自适应滤波时延估计算法。该算法能够在低信噪比环境下,获得具有较高精度的时延估计值,提高定位的精度。
1 自适应滤波时延估计算法
1.1基本信號模型
假设接收的两路石油管道信号[x1n]和[x2n]模型为:
[x1n=sn+n1n] (1)
[x2n=sn-D+n2n] (2)
其中[sn]为源信号, D为时延差值,[n1n]和[n2n]为干扰噪声。
1.2 RLS自适应滤波时延估计算法
对输入信号[xin]进行RLS自适应滤波[13]得到输出信号[yin]:
[yin=ωiTnxin] (3)
其中滤波系数为[ωin]。
则输出信号[yin]与期望信号[Din]之间的误差[ein]为:
[ein=yin-Din] (4)
其中遗传因子[λ]是小于1并且接近1的数,误差平方[ζin]与误差[ein]的关系表示为:
[ζin=k=1nλin-kei2k] (5)
最后对两路输出信号[yin]做互相关求时延。
2 PRLS自适应滤波时延估计算法
在RLS自适应滤波时延估计算法基础上,本文提出了PRLS自适应滤波时延估计算法,图1为PRLS自适应滤波时延估计算法的原理图:
该算法首先利用主成分分析法对信号进行预处理;接着,利用RLS自适应滤波对预处理后的信号进行降噪;然后,将降噪后的信号进行二次互相关的时延估计,并对二次互相关后的信号进行三次样条插值;最后,峰值检测得到时延值,进行定位。具体步骤如下:
2.1 PCA降噪
利用主成分分析法(PCA)将观测信号中主分量(事件信号)选取出来,去除次分量也就是干扰信号和噪声[14-15]。
首先对接收到的两路观测信号[x1n]和[x2n],[n=1,2,...,L],分别降噪q,重新排列得到[q×L-q+1]的观测矩阵,构造观测矩阵[XPin]:
[XPi=xP1xP2…xPL-q+1xP2xP3…xPL-q+2????xPqxPq+1…xPL] (6)
对观测矩阵[XPi]去均值得到零均值矩阵[XPmi]:
[XPmi=XPi-xPi] (7)
再對零均值矩阵[XPmi]计算协方差矩阵[CPi],对[CPi]进行矩阵奇异值分解:
[CPi=UUT=U12-1/2UT] (8)
其中,[CPi]的奇异值分布[12]在对角线上,且按由大到小排列。
再选取前P个反映主要信号分量的奇异值,舍去后面较小的、反映噪声干扰分量的奇异值,得到[012],获得正交变换矩阵:
[C0=U012] (9)
即,降噪后的信号矩阵为:
[C0XPmi=U012XPmi] (10)
再通过选取矩阵[C0XPmi]的第一行和第一列排成新的列向量,即为降噪恢复后的信号[xP1n]和[xP2n]。
2.2 RLS自适应滤波
利用RLS自适应滤波对降噪恢复后的信号[xP1n]和[xP2n]进一步提高信噪比。可得到输出信号[yPR1n]和[yPR2n]:
[yPRin=ωiTnxPin] (11)
其中[ωin]为滤波系数。
输出信号[yPRin]减去期望输出信号[Din]得到误差[ein]:
[ein=yPRin-Din=ωiTnxPin-Din] (12)
则误差平方[ζin]与误差[ein]的关系为:
[ζin=k=1nλin-kein2=k=1nλin-kωiTnxPin-Din2] (13)
其中,[λi]为遗传因子。当偏导数[ζin/ωin=0]时,可以得到误差平方[ζin]的极值,其中的最小值点就是[ωin]的最优值,也就是最优滤波系数,代入式(11)便可得到最优滤波后的信号[yPR1n]和[yPR2n]。
2.3 PRLS自适应滤波时延估计算法
对RLS自适应滤波后的信号[yPR1n]和[yPR2n]做互相关[16],如式(14)所示:
[RPR12τ=EyPR1nyPR2n+τ] (14)
再对信号[yPR1n]做自相关,得到
[RPR11τ=EyPR1nyPR1n+τ] (15)
最后对[RPR11τ]与[RPR12τ]做二次互相关得到[RPRRRτ]。
[RPRRRτ=ERPR11nRPR12n+τ] (16)
假设噪声为理想情况下的非相关高斯白噪声,噪声与信号也不具有相关性,可将信号与噪声的相关函数也近似看成零,将式(14)、(15)代入式(16)可得:
[RPRRRτ=RPRRSτ+RPRRNτ] (17)
其中,[RPRRS·]为源信号做的二次互相关;[RPRRN·]为噪声做的二次互相关。
同样在理想情况下,可把[RPRRNτ]看成是零,即
[RPRRRτ=RPRRSτ-D] (18)
为得到非整数时延值,进一步提高时延估计精度,对信号[RRPRRτ]进行三次样条插值[17]得到信号[RPRRRτ]。在[τ=D]时对插值后的信号[RPRRSτ-D]取最大值,利用[RPRRRτ]最大值对应的时间点估计时延。
采用基于双马赫-曾德尔干涉仪定位原理进行定位。震动发生的位置Z的计算公式为:
[Z=c?Dn] (19)
其中c为光速,n为光纤折射率。
3 仿真实验
仿真条件:由于石油管道盗油检测所用信号具有谐波特性,所以根據信号的特点用正弦信号叠加产生仿真信号,以5Hz为间隔进行叠加。设置盗油位置距检测点39.732千米,时延为7.15个采样点,即时延真实值为0.00029s。设采样率为25000Hz,采样点数为4000,观测信号频谱峰值为135Hz,20dB峰值带宽为200Hz。PCA算法的观测矩阵阶数选择100。
为验证算法的性能,采用均方根误差测试时延真实值与估计值的偏离程度,均方根误差越小,说明得到的时延估计值越准确。设RMSE为均方根误差,d为真实时延,di为时延的估计值,N为实验次数,公式为:
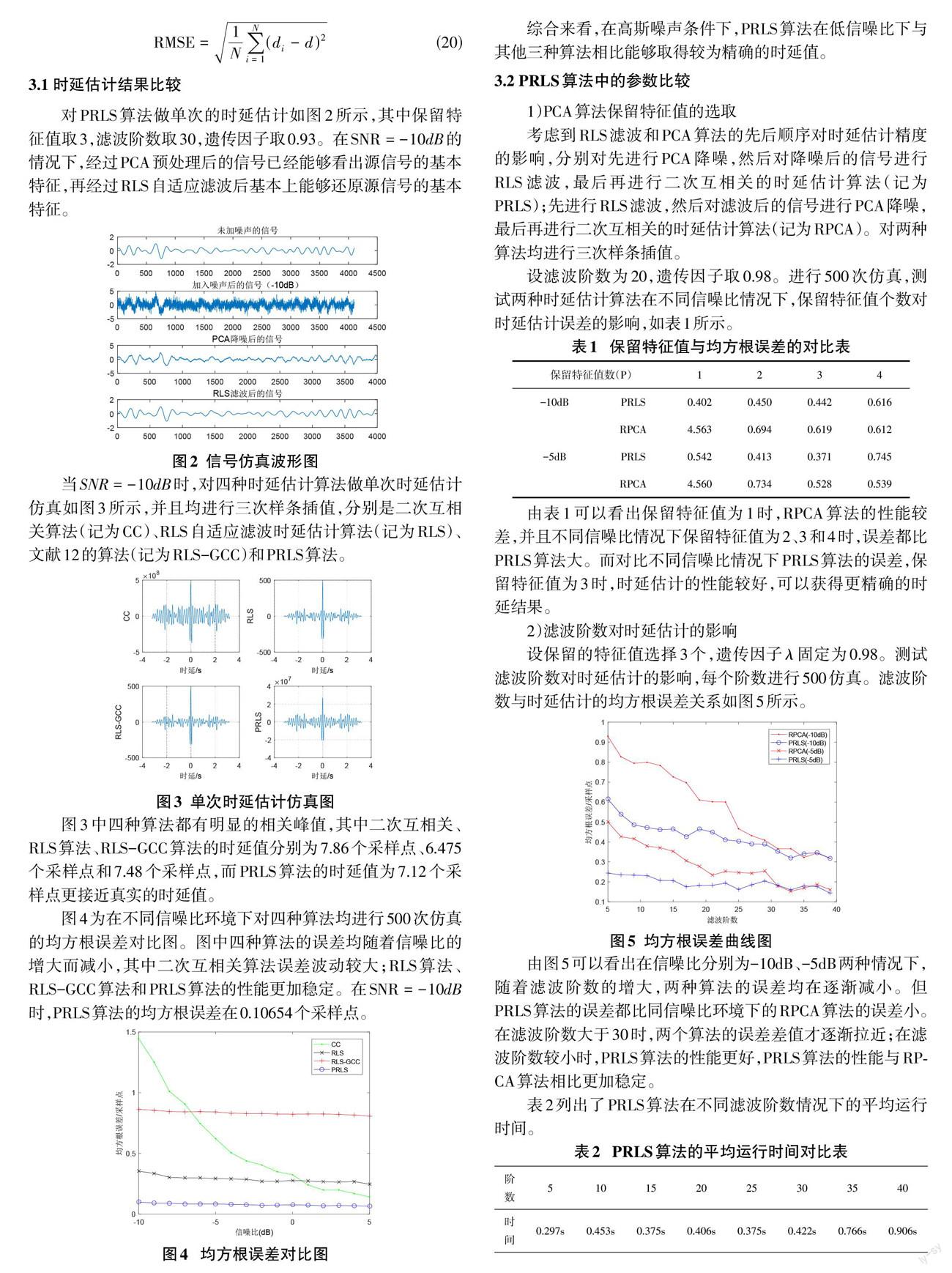
[RMSE=1Ni=1N(di-d)2] (20)
3.1 时延估计结果比较
对PRLS算法做单次的时延估计如图2所示,其中保留特征值取3,滤波阶数取30,遗传因子取0.93。在[SNR=-10dB]的情况下,经过PCA预处理后的信号已经能够看出源信号的基本特征,再经过RLS自适应滤波后基本上能够还原源信号的基本特征。
当[SNR=-10dB]时,对四种时延估计算法做单次时延估计仿真如图3所示,并且均进行三次样条插值,分别是二次互相关算法(记为CC)、RLS自适应滤波时延估计算法(记为RLS)、文献12的算法(记为RLS-GCC)和PRLS算法。
图3中四种算法都有明显的相关峰值,其中二次互相关、RLS算法、RLS-GCC算法的时延值分别为7.86个采样点、6.475个采样点和7.48个采样点,而PRLS算法的时延值为7.12个采样点更接近真实的时延值。
图4为在不同信噪比环境下对四种算法均进行500次仿真的均方根误差对比图。图中四种算法的误差均随着信噪比的增大而减小,其中二次互相关算法误差波动较大;RLS算法、RLS-GCC算法和PRLS算法的性能更加稳定。在[SNR=-10dB]时,PRLS算法的均方根误差在0.10654个采样点。
综合来看,在高斯噪声条件下,PRLS算法在低信噪比下与其他三种算法相比能够取得较为精确的时延值。
3.2 PRLS算法中的参数比较
1)PCA算法保留特征值的选取
考虑到RLS滤波和PCA算法的先后顺序对时延估计精度的影响,分别对先进行PCA降噪,然后对降噪后的信号进行RLS滤波,最后再进行二次互相关的时延估计算法(记为PRLS);先进行RLS滤波,然后对滤波后的信号进行PCA降噪,最后再进行二次互相关的时延估计算法(记为RPCA)。对两种算法均进行三次样条插值。
设滤波阶数为20,遗传因子取0.98。进行500次仿真,测试两种时延估计算法在不同信噪比情况下,保留特征值个数对时延估计误差的影响,如表1所示。
由表1可以看出保留特征值为1时,RPCA算法的性能较差,并且不同信噪比情况下保留特征值为2、3和4时,误差都比PRLS算法大。而对比不同信噪比情况下PRLS算法的误差,保留特征值为3时,时延估计的性能较好,可以获得更精确的时延结果。
2)滤波阶数对时延估计的影响
设保留的特征值选择3个,遗传因子[λ]固定为0.98。测试滤波阶数对时延估计的影响,每个阶数进行500仿真。滤波阶数与时延估计的均方根误差关系如图5所示。
由图5可以看出在信噪比分别为-10dB、-5dB两种情况下,随着滤波阶数的增大,两种算法的误差均在逐渐减小。但PRLS算法的误差都比同信噪比环境下的RPCA算法的误差小。在滤波阶数大于30时,两个算法的误差差值才逐渐拉近;在滤波阶数较小时,PRLS算法的性能更好,PRLS算法的性能与RPCA算法相比更加稳定。
表2列出了PRLS算法在不同滤波阶数情况下的平均运行时间。
表2中滤波阶数在5到30之间时,算法的平均运行时间在0.3s~0.4s之间波动;在滤波阶数大于30时,算法的平均运行时间从0.422s增加到了0.906s,运算时间大大增加。综合算法的运算时间和均方根误差来看,滤波阶数取30较为合理。
3)测试遗传因子对时延估计性能的影响
设保留的特征值选择3个,滤波阶数为30,因为遗传因子是小于1且接近1的数,所以取[0.93≤λ<1]。图6为两种算法进行500次仿真的均方根误差曲线图。
从图6可以看出,信噪比为-10dB和-5dB两种情况下,遗传因子小于0.98时,PRLS算法与RPCA算法相比误差较小。信噪比为-10dB情况下遗传因子为0.93时,PRLS算法的均方根误差为0.096147个采样点,而RPCA算法的均方根误差为0.12679个采样点,两个算法之间的误差差约0.03个采样点。
综合来看,在信噪比较低时,遗传因子较小时算法的性能更好,与RPCA算法相比,PRLS算法也有较为明显的优势。对比上述可以看出,先对信号进行PCA预处理再进行RLS滤波的PRLS时延估计算法能够达到更好效果。
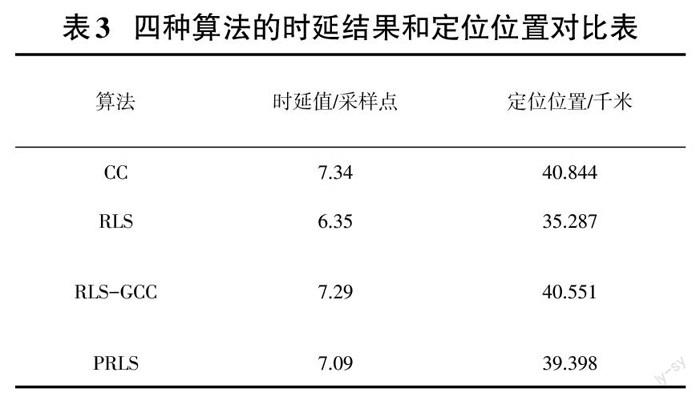
3.3石油管道盗取定位
光纤纤芯光速参考值为204079.277 km/s,光纤折射率为1.469。表3为四种算法在采集到的石油管道数据段中的时延结果和定位位置对比表。
对比表3中各个算法的时延值,PRLS算法的定位误差为0.334千米,能够获得更精确的石油管道盗取点的位置。
4 总结
为改善低信噪比情况下,时延估计精度不足导致石油管道盗取定位不准确的问题,本文提出的PRLS自适应滤波时延估计算法,将PCA主成分分析法、RLS自适应滤波和二次互相关相结合,不仅利用PCA算法对信号进行预处理,RLS自适应滤波还对信号进一步降噪提高了信噪比。仿真实验表明,该算法能在低信噪比下情况下取得较好的时延估计结果,表现出较好的鲁棒性,能够很好地定位石油管道盗取点的位置,同时也表明了算法的可行性,对实际应用具有一定的参考价值。
参考文献:
[1] Chen L,Liu Y C,Kong F C,et al.Acoustic source localization based on generalized cross-correlation time-delay estimation[J].Procedia Engineering,2011,15:4912-4919.
[2] Liu Y,Tie Y,Li D,et al.Leak detection and location using generalized correlation time delay estimation algorithm[J].Advanced Materials Research,2012,482/483/484:1741-1746.
[3] Arifianto D,Wirawan,Atmaja B T,et al.Azimuth tracking of underwater moving sound source based on time delay estimation using hydrophone array[J].Procedia Engineering,2017,170:169-176.
[4] Rahman S A,Arifianto D,Dhanardono T,et al.Localization of underwater moving sound source based on time delay estimation using hydrophone array[J].Journal of Physics:Conference Series,2016,776:012075.
[5] 魏文亮,茅玉龍.一种改进加权函数的GCC时延估计方法研究[J].计算机仿真,2021,38(5):16-20,84.
[6] 窦慧晶,雷倩,程军,等.基于三星定位快速二次相关时差估计算法研究[J].计算机仿真,2013,30(8):177-180.
[7] Xiong X L,Xu Y,Jiang L H,et al.Time delay estimation algorithm used in ultrasonic wind speed measurement system[J].Advanced Materials Research,2012,433/434/435/436/437/438/439/440:6457-6461.
[8] Meng X,Zhao D W,Ma S X,et al.Time delay estimation of AIS signal based on three-order cumulant[J].Wireless Communications and Mobile Computing,2018,2018:1349702.
[9] Yu L,Qiu T S,Luan S Y.Fractional time delay estimation algorithm based on the maximum correntropy criterion and the Lagrange FDF[J].Signal Processing,2015,111:222-229.
[10] Yu L,Qiu T S,Song A M.A time delay estimation algorithm based on the weighted correntropy spectral density[J].Circuits,Systems,and Signal Processing,2017,36(3):1115-1128.
[11] 谢含宇,王寿喜,郭乔,等.基于EEMD滤波和时延估计的次声波法管道泄漏定位[J].油气储运,2020,39(10):1148-1154,1164.
[12] 王宝仁,曹明瑞.基于RLS自适应滤波算法的广义互相关时延估计方法研究[J].组合机床与自动化加工技术,2020(6):27-31,36.
[13] Chu Y J,Mak C M.A new QR decomposition-based RLS algorithm using the split Bregman method for L1-regularized problems[J].Signal Processing,2016,128:303-308.
[14] 王海鹏,降爱莲,李鹏翔.牛顿-软阈值迭代鲁棒主成分分析算法[J].计算机应用,2020,40(11):3133-3138.
[15] 闵锋,叶显一,张彦铎.基于改进主成分分析网络的手写数字识别方法[J].华中科技大学学报(自然科学版),2018,46(12):101-105.
[16] 刘敏,曾毓敏,张铭,等.基于二次相关的语音信号时延估计改进算法[J].应用声学,2016,35(3):255-264.
[17] 马锐,贾学翠,张永康,等.基于三次样条插值法的储能锂电池建模与参数辨识[J/OL].电源学报:1-16[2021-05-11].
【通联编辑:唐一东】
猜你喜欢
计算机教育(2016年8期)2016-12-24
商场现代化(2016年29期)2016-12-23
中国房地产·学术版(2016年10期)2016-11-18
大学教育(2016年11期)2016-11-16
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
考试周刊(2016年84期)2016-11-11
