二级直线倒立摆的稳定控制*
2022-06-13 07:53左瑞
科技与创新 2022年11期
左瑞
(宿豫中等专业学校,江苏 宿迁223800)
在控制领域中倒立摆具有多变量、非线性、强耦合等特性,这些典型特征使它成为了检验控制策略正确性与可行性的平台。对该类系统提出了诸多控制方法,所得成果在众领域有广泛的应用价值。本文对倒立摆展开研究也有现实意义。
1 二级直线倒立摆的数学建模
考虑到系统的多输入和多输出特性,采用受力分析建立系统模型十分复杂。本文采用拉格朗日方程,即从能量观点出发建立数学模型。二级直线倒立摆结构如图1所示。
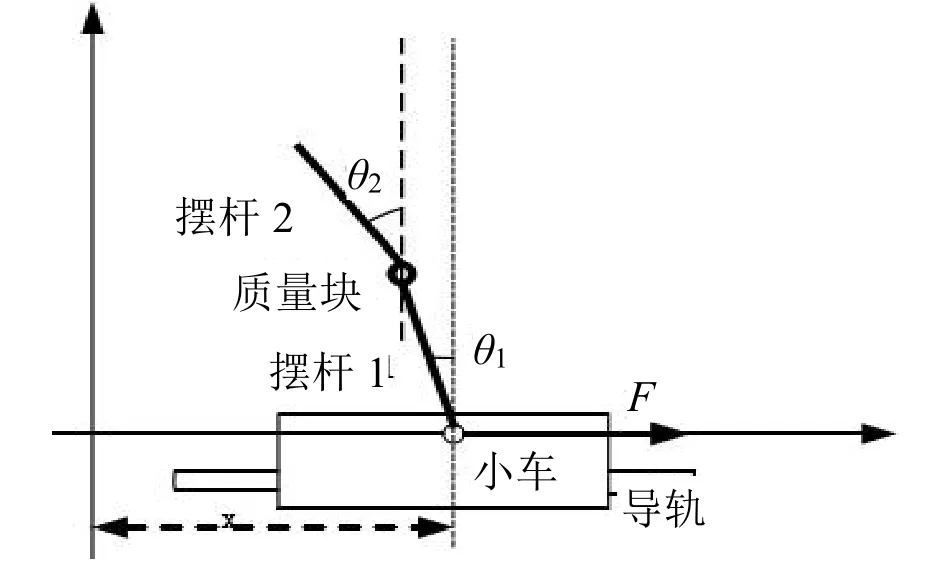
图1 二级直线倒立摆结构示意图

系统各参数及数值如表1所示。

表1 系统参数
设摆杆1、摆杆2、质量块坐标分别为(x1,y1)、(x2,y2)、(x3,y3),则有:

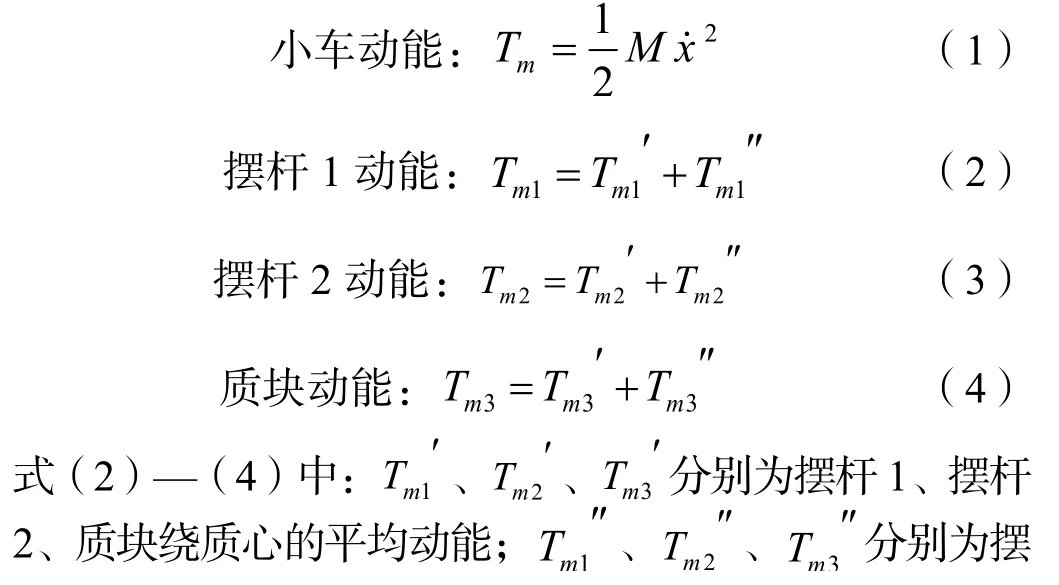
由式(5)—(7)分别求得系统各环节的动能。系统总动能T=Tm+Tm1+Tm2+Tm3。
系统的总势能V=Vm1+Vm2+Vm3=m1gl1cosθ1+m2g(2l1cosθ1+l2cosθ2)+2m3gl1cosθ1。
拉格朗日函数为L=T-V。

2 性能分析
根据系统稳定判据可知,系统若要稳定,所有特征根均需具备负实部。本文借助MATLAB简化求根。编辑程序如下:

经过计算,特征值s1=-10.043 8,s2=-5.026 2,s3=10.04,s4=5.2,s5=0,s6=0。不难发现6个特征值中有2个正实根和2个零根,根据劳斯判据,系统不稳定。
根据状态能控性的秩判据可知,如果系统是状态完全能控的,则能控性矩阵Qk的秩需等于系统阶次6。借助MATLAB提供的矩阵秩计算函数可以求得Qk的秩,详细代码如下:


经计算,矩阵Qk秩为6,得知系统是完全状态能控的。
根据状态能观测性的秩判据可知,如果系统是状态完全能观测的,则能观测性判别矩阵Qc的秩需等于系统阶次6[2-3]。同样借助MATLAB提供的矩阵秩计算函数求Qc的秩,详细代码如下:
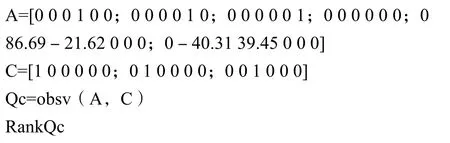
通过计算,可以得到Qc秩为6,得知系统完全能观测。
3 控制方案设计
根据前述分析,所研究的系统虽开环不稳定但状态能控能观。所以可通过状态反馈任意配置系统闭环极点,以使系统获得目标性能。本文控制目标:系统稳定,过渡过程短,调整时间大约2 s。按照对应于2%误差带的近似公式求取调整时间。当取阻尼比等于0.5,无阻尼自然振荡角频率等于4时,可求得主导极点为-2+1.5j、-2-1.5j。将另外4个闭环极点均配置为-15。按上述6个目标极点,借助MATLAB求反馈矩阵,代码如下:

并取整得:k=[124,231,-716,113,-9,-120];在MATLAB里搭建系统虚拟模型,进行性能测试[4]。
虚拟模型如图2所示。稳定性能测试如图3所示。
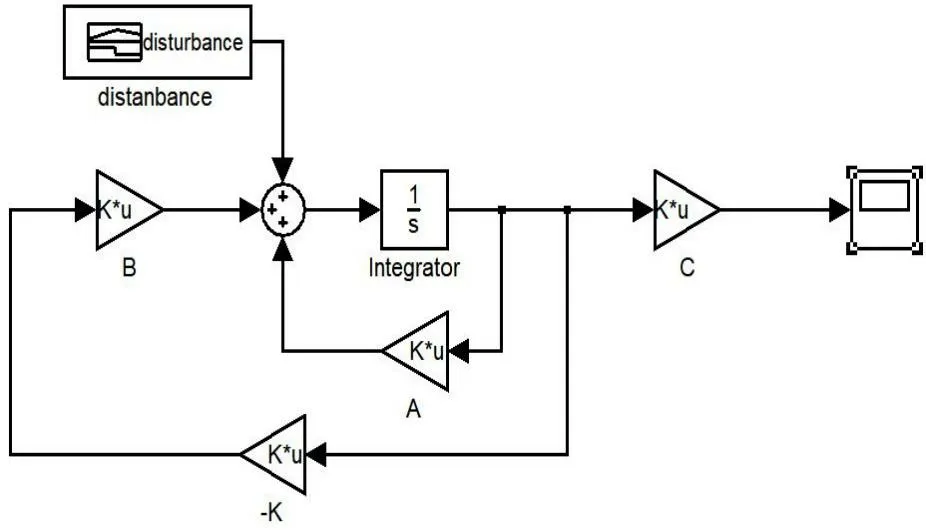
图2 虚拟模型

图3 稳定性能测试
由图3可知,采用极点配置后,系统从非稳定状态[0,0.1,0.3,0,0,0]调整为稳定状态,调整时间约为2 s,符合设计目标。
为验证系统抗扰能力,在3 s加入持续时间为1 s的脉冲信号,脉冲干扰如图4所示,状态响应如图5所示。
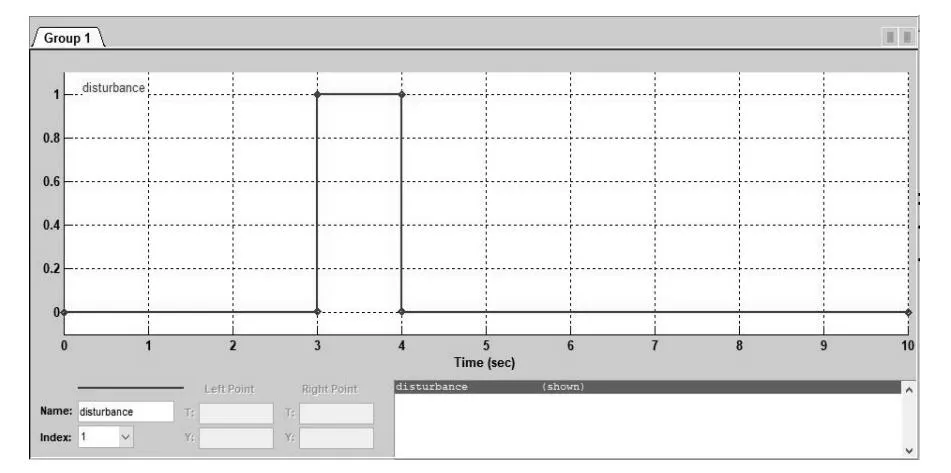
图4 脉冲干扰
由图5可知,倒立摆在3 s突然受到脉冲干扰后出现振荡,干扰撤去后,大约调整2 s,系统重新恢复到平衡状态。验证了系统抗扰性能良好,满足设计目标。
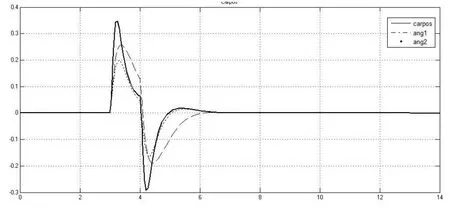
图5 抗扰性能测试
4 结论
本文建立了二级直线倒立摆的数学模型,分析了系统性能,设计了状态反馈控制方案使系统稳定,满足了调整时间为2 s的控制目标。通过仿真验证了所设计的控制方案合理有效。
猜你喜欢
科学导报(2021年7期)2021-02-22
地理教育(2019年1期)2019-03-06
读与写·教育教学版(2017年10期)2017-11-10
中国化妆品(2017年12期)2017-06-27
晚晴(2016年11期)2016-12-20
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
哈尔滨理工大学学报(2014年3期)2015-01-04