液压驱动弹齿式清秸装置转速控制系统设计
2022-06-14 22:55尤晓东魏传省白伟张旭
农业科技与装备 2022年1期
尤晓东 魏传省 白伟 张旭

摘要:为提高免耕播种机的苗带秸秆清理效果、减少清秸装置的动力浪费,利用运动学分析探究了清秸装置转速与免耕播种机作业速度之间的关系,设计液压驱动弹齿式清秸装置转速控制系统,实现清秸装置转速与作业速度的匹配。
关键词:苗带清理;弹齿清秸装置;液压驱动;转速控制系统
中图分类号:S223.2 文献标识码:A 文章编号:1674-1161(2022)01-0034-03
秸秆还田后地表存在大量秸秆,会导致播种质量下降,因此提高苗带秸秆的清理效果对保护性耕作有重要的意义。液压驱动弹齿式清秸装置可以使弹齿清秸部件高速转动,实现苗带秸秆的清理,但清秸装置的转速过高时,会导致动力浪费和土壤扰动量过大;转速过低时,秸秆清理效果不佳。探究清秸装置转速与免耕播种机作业速度之间的关系,设计弹齿清秸装置转速控制系统,对提高免耕播种作业苗带秸秆清理效果十分必要。
1 工作原理与运动学分析
1.1 从动式清秸装置工作原理
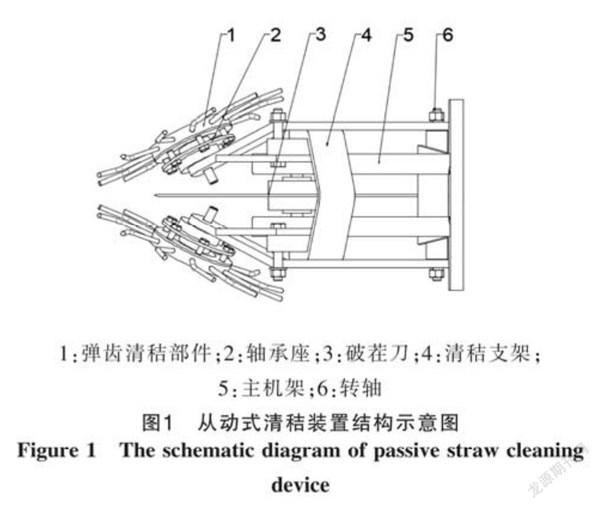
从动式清秸装置包括主机架、清秸机架、弹齿清秸装置、破茬刀等,如图1所示。
该清秸装置通过轴承座安装在免耕播种单体的正前方,沿拖拉机前进方向运动。作业时清秸装置通过秸秆摩擦力作用发生转动,通过弹齿的拨、弹作用,将秸秆清理至苗带两侧。
从动式清秸装置结构简单,安装方便,可以实现苗带秸秆的清理。但当清秸部件產生滑移时,容易导致转速较低,从而影响苗带秸秆的清理效果。
1.2 液压驱动式清秸装置工作原理
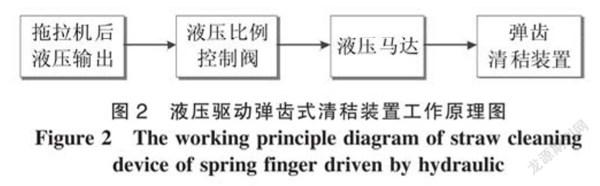
液压驱动弹齿清秸装置在从动式清秸装置的基础上增加液压驱动及控制部分,由拖拉机后液压输出、液压控制阀和液压马达为清秸装置提供动力。液压马达带动弹齿清秸部件高速转动,从而实现苗带秸秆的清理,工作原理如图2所示。
液压驱动弹齿清秸装置转动角速度最小值应与从动式清秸装置在秸秆摩擦力作用下的理论角速度相等,即:
ω≥ω0 (1)
式中: ω—弹齿清秸装置角速度,rad/s;ω0 —从动式清秸装置转动角速度,rad/s。
1.3 清秸装置运动学分析
对从动式弹齿清秸装置进行运动分析,如图3所示,清秸装置的运动由x轴方向的滚动运动和沿y轴负方向的滑移运动组合而成,滚动速度和滑移速度是前进速度v在x轴和y轴负方向的速度分量,即v为机具前进速度,v1为弹齿清秸装置的纯滚动速度,v2是弹齿清秸装置的纯滑移速度。
从动式清秸装置在秸秆摩擦力作用下的理论角速度为:
ω0 == (2)
式中:v—免耕播种机前进速度,m/s;v1—从动式清秸装置理论滚动速度,m/s;r—弹齿清秸装置投影半径,m;α—弹齿清秸装置与机具前进方向夹角,°。
根据转速与角速度的关系可得弹齿清秸装置的理论转速为:
n== (3)
式中: n—弹齿清秸装置的理论转速,r/min。
为保证良好的播种质量,免耕播种作业时前进速度应控制在8 km/h左右,最大不超过10 km/h,最小不低于3 km/h。则可得免耕播种机前进速度为8 km/h时的弹齿清秸装置理论角速度为13.9 rad/s,理论转速为132.8 r/min。
2 控制系统设计
2.1 系统总体设计
控制器根据轮速传感器采集到的机具前进速度计算清秸装置目标转速,根据转速传感器采集到的清秸装置实际转速与目标转速的差值调节液压马达的转速,从而实现弹齿清秸装置转速的精准控制。系统总体设计如图4所示。
转速传感器选用光电式旋转编码器,编码器将转速信号转化为脉冲信号,控制器解析脉冲信号,根据公式4计算得到机具前进速度:
v=πdf (4)
式中: df—地轮直径,m;pt—编码器单位时间脉冲数,个;np—编码器每转脉冲数,个。
2.2 控制器程序设计
系统初始化后,控制器采集轮速传感器的脉冲数据用以计算机具前进速度,根据公式(3)计算清秸装置目标转速,采集编码器脉冲数据用以计算清秸装置实际转速,并判断实际转速和目标转速是否相等。若不相等,则通过PID控制计算比例阀控制信号的输出量,从而调节液压马达转速,实现清秸装置转速的控制。清秸装置转速控制的程序流程图如图5所示:
3 结论
介绍了从动式和液压驱动式弹齿清秸装置的工作原理,通过运动学分析得到了清秸装置理论转速与车速之间的关系;设计了清秸装置转速控制系统,可以实现弹齿清秸装置转速与机具前进速度的匹配。
参考文献
[1] 王庆杰,曹鑫鹏,王超,等.东北黑土地玉米免少耕播种技术与机具研究进展[J].农业机械学报,2021,52(10):1-15.
[2] 袁盼盼,李洪文,蒋贵菊,等.滴灌区宽窄行玉米免耕播种带秸秆清理装置设计与试验[J].农业机械学报,2021,52(6):43-52.BB7850AE-A12D-4AB7-9C32-3D4BB8697829
[3] 余海波. 免耕播種机凹面爪式清茬机构仿真与试验[D].吉林:吉林大学,2017.
[4] 张素霞,杨向东.玉米机械化免耕播种基本原理与作业方法[J].农机使用与维修,2019(10):93.
Design of Rotating Speed Control System of Straw Cleaning Device of Spring Finger Driven by Hydraulic
YOU Xiaodong1, WEI Chuansheng1, BAI Wei2, ZHANG Xu1*
(1. Liaoning Institute of Agricultural Mechanization, Shenyang 110161, China; 2. Institute of Crop Cultivation and Farming System, Liaoning Academy of Agricultural Sciences, Shenyang 110161, China)
Abstract: In order to improve the cleaning effect of the seedling belt of the no-tillage planter and reduce the power waste of the straw cleaning device, this paper uses kinematic analysis to explore the relationship between the speed of the straw cleaning device and the operating speed of the no-tillage planter, and design a hydraulically driven spring-tooth type the control system of the straw cleaning device.
Key words: straw cleaning device of spring finger; hydraulic drive; speed control system; seedling belt cleaningBB7850AE-A12D-4AB7-9C32-3D4BB8697829