
阀厅智能巡检机器人系统设计及应用研究
2022-06-23 06:41中国南方电网有限责任公司超高压输电公司昆明局连兴文
电力设备管理 2022年9期
中国南方电网有限责任公司超高压输电公司昆明局 连兴文
引言
阀厅是整个换流站的核心部分,其主要是进行换流阀放置的封闭建筑,阀厅是否能够稳定运行,直接关系到整个直流输电系统、换流站的安全性与稳定性。由于换流阀本身的特性,运转过程中会生成大量的热量,需要配置温度监控设施、高效冷却设施,而正是因为温度监控设施、冷却设施在使用过程中容易出现故障,必须要针对阀厅进行实时监控与定期巡检,才能够有效保障阀厅运行的安全性。
传统的巡检模式主要是通过人工方式进行巡检,因此会面临手段单一、检测质量分散、工作效率低、劳动强度大等缺陷,从而导致选件及时性、到位率均无法得到有效的保障,同时固定方位的监控系统也存在着较大的局限性,整体效果不够理想[1]。然而5G 时代的全面到来,由于各种新兴技术的不断普及应用,诸如人工智能、大数据技术、云计算等新兴技术的不断应用,为阀厅巡检提供了有效的技术支持。
上述背景下,智能巡检机器人逐渐成为行业研究的重点。对于阀厅管理来说,传统阀厅主要是采用人工巡检的模式进行管理,整体管理效率相对较为低下,同时巡检的及时性、覆盖率等均不够理想,显然已经无法满足阀厅巡检工作的要求。针对上述问题,本研究结合阀厅巡检工作需求与信息技术发展动态,深入阐述了阀厅智能巡检机器人系统设计方案与实际应用情况,现针对相关内容进行如下分析,仅供参考与借鉴。
1 阀厅智能巡检机器人概述
所谓阀厅智能巡检机器人,指的是建立在可移动的感知执行平台基础之上,系统本身搭载了多种类型的传感器,以此来针对设备的状态进行检测,同时完成设备操作、业务处理等能够定制的可编程多功能操作系统。阀厅智能巡检机器人能够全面代替传统的人工巡检工作中面临的一些重复性、危险、困难的工作,而且阀厅智能巡检机器人的稳定性也更高。
从当前普遍应用的阀厅智能巡检机器人来看,基本都是利用四驱底盘、无轨化导航技术,同时集成导航单元、通讯单元、主控单元、供电单元、驱动单元、防护单元等多个模块,本身具有极强的适应性,具有集群化、无轨化、可调配、智能化的优势,能够有效适应高温、高寒等恶劣条件,且能够与电力系统进行无缝对接,能够开展实时监控、红外测温、可见光图像识别、故障报警、巡检报告分析、定点巡检、智能巡检等多项工作。
2 阀厅智能巡检机器人系统框架
阀厅智能巡检机器人的设计主要是通过智能轨道来设计行走方式,并在轨道中进行各种系统的挂载,如自动化机电设施、温湿度传感器、影音采集设施、音视频采集设施等,同时利用红外热成像相机针对设备进行热图像采集、热分析,利用普通可见光相机来针对阀厅进行远程的图像采集、实时监控[2]。同时在此基础上,利用云台实时传输采集完成的图像数据,系统能够及时掌握阀厅各种设备运行状况[3]。
2.1 系统硬件
对于阀厅智能巡检机器人系统的设计,主要包含轨道及升降设备、电机驱动电路、供电模块、通信组件、控制中心等共同组成,基于各种拾音器、摄像机来完成音视频采集工作,通过数字模拟之后,将对应的信息传输到监控中心后台。此次系统可以满足RS485协议、TCP/IP 协议,具体的结构见图1。
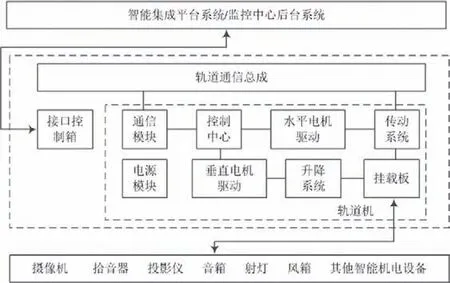
图1 阀厅智能巡检机器人系统示意图
控制中心是整个系统当中的核心,全面负责阀厅智能巡检机器人系统的运行控制。控制中心主要是通过DSP 处理器、嵌入式CPU、通信模块等共同组成。根据电机的工作模式来看,电机驱动模块主要包含直流电机驱动电路、步进电机驱动电路,可以针对电机垂直升降、水平移动进行控制,同时还能够针对电机转动角度、速度、正反向等进行控制[4]。
轨道机针对巡检机器人的整个轨道运行情况进行控制,基于轨道总成来进行拐弯或者直线运行模式,这个过程中能够进行数据传输、无线供电[5]。与此同时,通过升降机的使用,还能够针对各种挂载设备进行多维度的移动,使得巡检机器人能够针对阀厅进行更为系统的扫描,且能够提升精度更高的定位服务。此外,通信模块主要可以提供有线与无线通信接口,满足多元化的通信传输需求。
电源模块主要是为整个系统及各种挂载系统提供电力方面的支持,能够综合参考阀厅智能巡检机器人系统需求提供多元化的电力支持,如AC 220V,AC 48V,AC 24V,DC 48V ,DC 18V,DC 12V 等。此外,通过双触点焦点技术、直线滑环技术的应用,能够解决传统模式面临的掉电问题。阀厅智能巡检机器人系统实物图如图2所示。
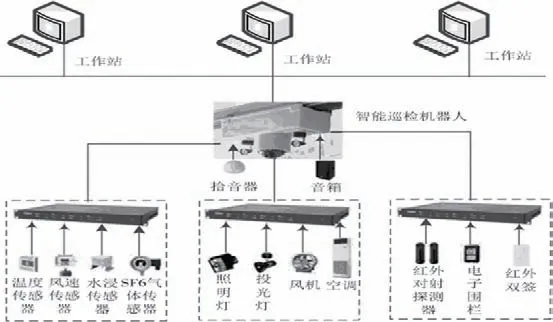
图2 阀厅智能巡检机器人系统实物图
2.2 系统软件
系统软件的功能主要是应用于通信,能够让系统满足人机交互的需求。一方面,软件能够应用于接收工作人员的各类指令,然后针对巡检机器人进行控制;另一方面,软件能够获取巡检机器人传输的各种信息,包括传感器信息、画面等。阀厅智能巡检机器人系统包含巡检配置模块、运动控制模块、数据分析管理、系统设置等。具体是采用MVC 分层模式,将系统分别划分为(Model)、视图(View)以及控制器(Controller)。
模型能够直接针对应用程序相关的数据逻辑进行处理;视图则能够直接现实应用程序当中的数据处理信息;控制器主要是负责各种数据的读取、处理。上述三个层次之间完全独立,相关开发人员可以基于实际应用需求,针对各个层次实施更改处理,系统本身具有理想的扩展性。此外,MVC 分层模式还能够让系统应用于扩展平台,可移植性较为理想。系统结构图见图3。
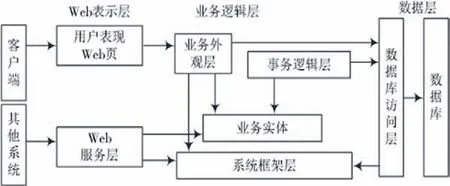
图3 阀厅智能巡检机器人系统结构模型图
3 巡检机器人设置
3.1 巡检机器人
巡检机器人主要是通过多个传感器共同组成的系统,通过挂载补光设施、拾音设备、摄像头、红外检测仪等,对应的检测范围主要是根据场地实际情况进行轨道的定制,水平运动能够实现360°持续旋转,运动范围通常可以达到-45~90°。
红外检测仪的使用,能够直接针对阀厅TVM板、换流阀晶闸管、阀冷却系统、交直流滤波器、平波电抗器、换流变压器、套管、隔离开关、断路器等进行实时监测,针对温度数据进行实时传输。拾音设备能够针对阀厅环境各种设施的运行声音状态进行监控,同时针对音频进行可视化的显示。系统也能够利用巡检机器人直接针对现场开展音频广播,包括各种实时喊话、警示音频、语音指导等。巡检机器人通过多种传感器进行信息的采集、传输,同时又能够直接接受系统多种控制模式,还能够通过挂载传感器的调整,针对巡检机器人功能进行拓展。
3.2 多模式巡检
阀厅内部的各种仪器设备较为复杂,而且相互之间呈现为紧密排布的状态,阀厅智能巡检机器人也需要通过方便、可控、灵活的巡检模式,才能够有效保障巡检工作的效果。这就需要采用多模式混合的模式开展巡检,在有效满足持续长时间巡检、有效覆盖面积的前提下,进行遥控检测、精确检测。
针对上述要求,可以引入2种巡检机器人,包括遥控巡检模式、智能巡检模式。遥控巡检模式主要是共同远程控制,针对特定位置、设备进行巡检。智能巡检模式主要是根据提前预设的内容,包括启动时间、巡检范围、巡检内容,自动进行巡检,同时基于设备智能分析,生成对应的统计报表。当智能巡检机器人发现故障的情况下,能够针对该位置进行长时间连续巡检,进一步确定故障问题,在传输数据的同时,启动预警系统。
4 智能故障诊断专家系统
阀厅智能巡检机器人的应用,要想实现智能化的目标,就必然需要引入专家库。本研究提出的系统是在传统专家库的基础上融入人工神经网络,详细的结构图如图4。基于BP 神经网络的应用,能够直接把把维修技师、维修工程师积累的实际诊断经验与维修经验进行归纳,通过阈值与节点的模式储存到神经网络当中,同时综合利用样本训练,最终建立隐式知识库,能够不断模拟专家基于直觉、经验进行诊断推理的进程。在长时间使用积累的过程中,针对新故障进行迭代学习,能够针对知识库进行不断的完善,进一步提升巡检机器人的智能化水平。
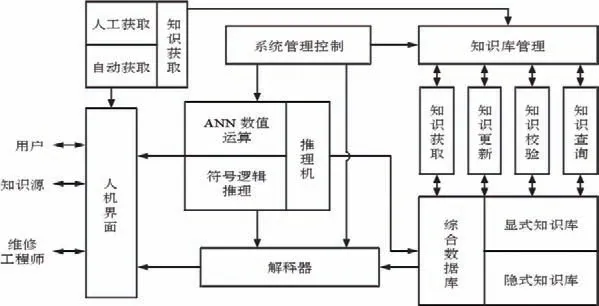
图4 基于人工神经网络的专家系统架构
人机交互界面(human-computer interface,HCI)作为人—机—环进行交流沟通的主要结构,其需要满足阀厅内部的复杂环境,且需要满足海量信息传输的需求。基于上述要求,本研究设计的人机交互界面主要包含四个部分:
二维地图或者三维地图,能够实时显示各种电子地图的各种信息,可以实时进行记录、导出、下载等功能,全面反映机器人工作状况;针对阀厅高清图像、热成像图像信息等进行显示;针对当前任务状态进行显示,包含智能巡检机器人状态、巡检点情况等;报警相关的信息内容,包括报警时间、报警值、报警内容等。基于智能故障诊断专家系统的应用,系统支持历史数据统计与趋势分析,生成日志以供查看,能够提前预测阀厅可能出现的设备故障和运行环境缺陷,并及时发出预警信息通知后台管理人员。
5 结语
综上所述,阀厅智能巡检机器人系统的设计与应用,能够全面解决传统人工巡检存在的管理效率相对低下、巡检的及时性差、覆盖率低等诸多问题,实现智能化实时监控、智能化巡检、专家系统分析,全面提升阀厅巡检的智能化水平,从而有效保障换流站、电力系统的安全性与稳定性。
猜你喜欢
工业设计(2022年8期)2022-09-09
军民两用技术与产品(2021年10期)2021-03-16
小学阅读指南·低年级版(2020年11期)2020-11-16
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
文苑(2018年23期)2018-12-14
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09
文苑(2018年21期)2018-11-09
少儿科学周刊·少年版(2015年4期)2015-07-07
