高地隙植保机油门自动控制系统研制与试验*
2022-06-27 08:11李加琪杜娟安广顺任可芸王中義印祥
中国农机化学报 2022年7期
李加琪,杜娟, 2,安广顺,任可芸,王中義,印祥, 2
(1. 山东理工大学农业工程与食品科学学院,山东淄博,255000;2. 山东省旱作农业机械及信息化重点实验室,山东淄博,255000)
0 引言
随着无人驾驶技术在农业的推广与应用,农业机械的自动化程度也在不断提高[1-3]。具备无人驾驶的高地隙植保机能够自主完成喷药作业,避免作业人员现场中毒等现象的发生。而无人驾驶要求其具备自动转向、速度自动控制、油门自动控制等基本功能[4]。
油门用以控制高地隙植保机发动机转速大小和输出动力。发动机输出动力主要用于提供整机行驶和液泵工作,在喷药作业时需要根据道路情况、作业车速及液泵工作压力实时调节油门大小[5]。为了满足自动导航和无人驾驶系统对农业机械自动控制的要求,许多研究人员从事农机传动系统、油门自动控制等策略的研究[6],比如赵春江等[7]通过建立静液压传动农机油门开度、变量泵排量与速度对应的数学模型,实现了发动机转速与变量泵排量协同控制的方法。现阶段,高地隙植保机油门控制操作仍然以驾驶员手动操作为主,劳动强度大且作业精度低,现有的汽车或拖拉机上电子油门控制策略是通过驾驶员通过手动油门操作或脚踩油门踏板将信号传输到油门控制器实现供油、变速等控制,而高地隙植保机无人驾驶控制关键在于实现车速自动控制,随着精准农业的发展[8],对高地隙植保机行走速度和精度提出更高的要求,因此实现高地隙植保机油门自动控制对保证良好的喷药效果和提高机械的自动化水平有着重要的意义[9-11]。
针对上述问题,以自主研制的无人驾驶高地隙植保机为研究平台,根据高地隙植保机油门动作原理,设计了油门控制器、拉线轮等部件,研制了高地隙植保机油门自动控制系统,能够根据作业指令实现油门的自动控制,使车辆驾驶操作更加轻便、自动化,满足无人驾驶对油门控制的需求。
1 油门自动控制系统工作原理
油门自动控制系统主要包括电机驱动器、油门控制器、角度传感器、电机及传动机构等,如图1所示,油门调节过程中,拉线轮与角度传感器在减速电机的带动下同步转动相应角度,油门控制器用于读取角度传感器反馈的实际数值并与CAN总线上的油门指令进行比较,将控制信号发送至电机驱动器,进而控制电机正反转以带动拉线轮旋转至期望角度,同时拉线带动油门到达期望位置,实现油门大小的自动调节。

图1 油门自动控制原理框图
2 关键部件设计与分析
油门调节装置中直流减速电机、角度传感器选型及结构设计直接影响油门控制的可靠性和准确性,考虑到高地隙植保机实际工作环境,因此,应避免出现油门调节装置长期工作出现晃动、磨损等问题,同时所选用的角度传感器应具备测量精度高,结构稳定,防水防尘等优点,以确保其具有良好的结构稳定性和使用寿命。对于减速电机选型而言,应选用具备自锁功能、传动比大的蜗轮蜗杆电机,即当减速电机停止工作时,拉线轮也能保持在固定位置,保证发动机动力稳定的输出。
2.1 油门调节机构设计
以自主研发的无人驾驶高地隙植保机为研究平台,根据其发动机油门动作原理,设计如图2的油门调节机构,主要包括直流减速电机、拉线轮、角度传感器、安装支架、联轴器等。角度传感器与直流减速电机之间通过平行切缝联轴器联结,并进一步固定在相应固定板上,保证两者同步旋转,而且具有减震、缓存的作用;拉线轮与直流减速电机直接联接固定在另一侧,并带动油门拉线工作。
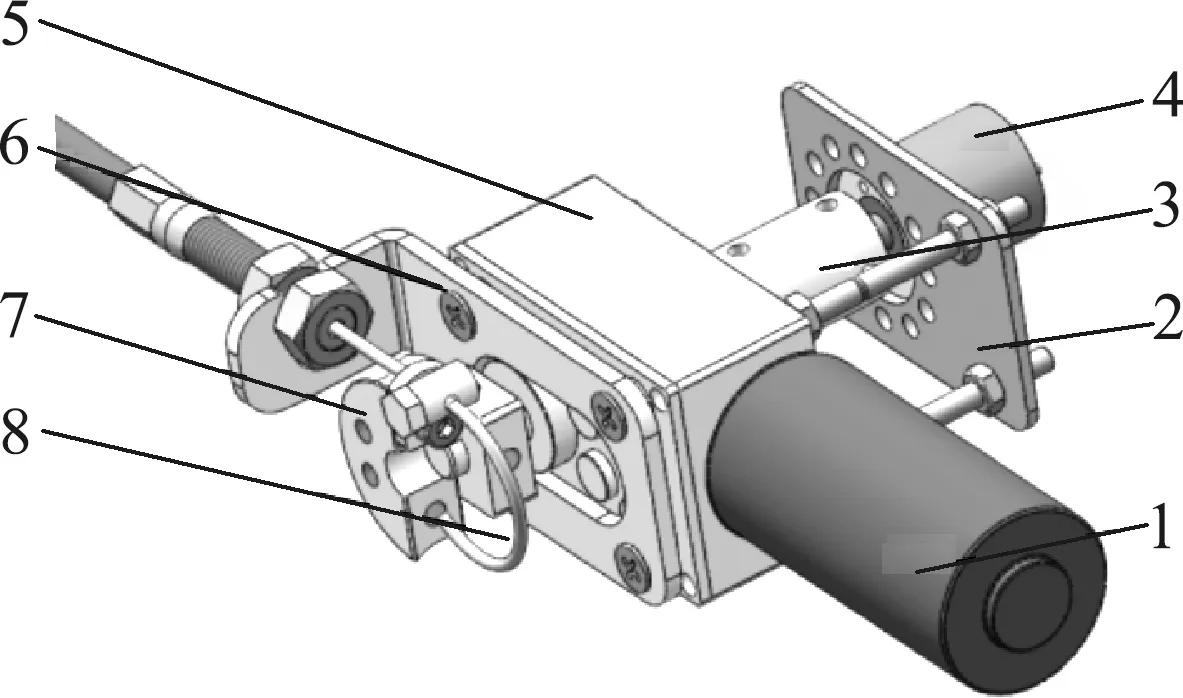
图2 油门调节机构
在调节油门过程中,拉线轮与减速电机同步转动,因此拉线轮与电机传动机构有相同的角速度ω,图3为拉线轮转动轨迹图(A0点表示油门拉线上固定一点,A1表示经时间Δt后该点位置)。
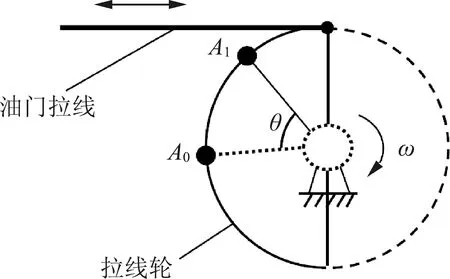
图3 拉线轮转动示意图
(1)
式中:i——电机减速比;
n1——电机输入转速,r/min;
n2——电机传动机构实际转速,r/min;
ω——拉线轮旋转角速度,rad/s;
Δθ——经时间Δt拉线轮旋转角度。
通过实际测量油门拉线可拉伸长度最大值约为4.3 cm,油门拉线拉力值为4.5 N,为了使角度传感器测量值在最佳范围,所设计拉线轮有效半径R=3.5 cm。
根据以上工作参数,同时考虑到实际应用过程中存在摩擦等阻力因素,本文采用12 V的直流减速电机进行油门调节机构的设计,电机减速比为500,额定输出扭矩和额定转速分别为60 kg·cm和6 r/min。拉线轮在减速电机的带动下实现转动,从而实现油门的调节,主要技术指标见表1。

表1 减速电机技术参数
2.2 角度传感器选型
拉线轮旋转角测量装置是油门自动控制系统的重要部分,用以读取拉线轮实际旋转角度,并以模拟信号的形式反馈至油门控制器,控制减速电机转动至期望值。
(2)
式中:L——油门拉线最大长度,m;
R——拉线轮有效半径,m;
α——拉线轮最大旋转角度。
将2.1节所得参数L和R的值代入式(2),转角α为70.4°。
根据拉线轮工作参数范围,本文采用的转角测量装置是有效值为360°的非接触式精密角度传感器,最佳测量范围为0~180°,主要由传感器、磁块、固定结构等部分组成,其输入轴随直流减速电机同步转动以测量拉线轮的旋转角度,并确定角度传动比为1∶1,能保证拉线轮旋转角度在角度传感器的测量最佳范围之内。该装置测量精准度高,且稳定性强,在进行复杂的田间作业时也能完成转角精确的测量,主要技术指标见表2。

表2 角度传感器技术参数
2.3 油门控制器设计
油门控制器作为油门控制的核心部件,通过CAN总线接收目标油门指令并与读取的角度传感器测量数值分析比较,将控制信号发送至电机驱动器以控制电机转动。
2.3.1 油门控制器硬件设计
油门控制器以PIC18F258为核心处理器,通过A/D转换器的转换端口A0实时读取角度传感器的反馈数值。PCA82C250芯片提供CAN总线的物理接口,接收输入到CAN总线的油门指令,并由四个功率管输出高低电平控制信号实现通断组合联合控制减速电机的正反转。其接线原理如图4所示,其中S1、S2、S3、S4为CMOS功率管。

图4 油门控制器接线图
当C1和C4高电平、C2和C3低电平时,S1和S4导通,S2和S3截止,减速电机正转;当C2和C3高电平、C1和C4低高电平时,S2和S3导通,S1和S4截止,减速电机反转。通过端口C1、C2、C3、C4的高低电平分别控制功率管S1、S4和S2、S3的通断以控制减速电机的旋转方向,从而使拉线轮在减速电机的带动下实现转动以调节油门大小。
2.3.2 油门控制器软件设计
根据无人驾驶高地隙植保机油门自动控制的电控原理、信号传输形式、转角测量等要求,设计了图5所示的油门自动控制装置工作流程图,并在实验室对油门自动控制系统进行了初步的调式和试验验证。
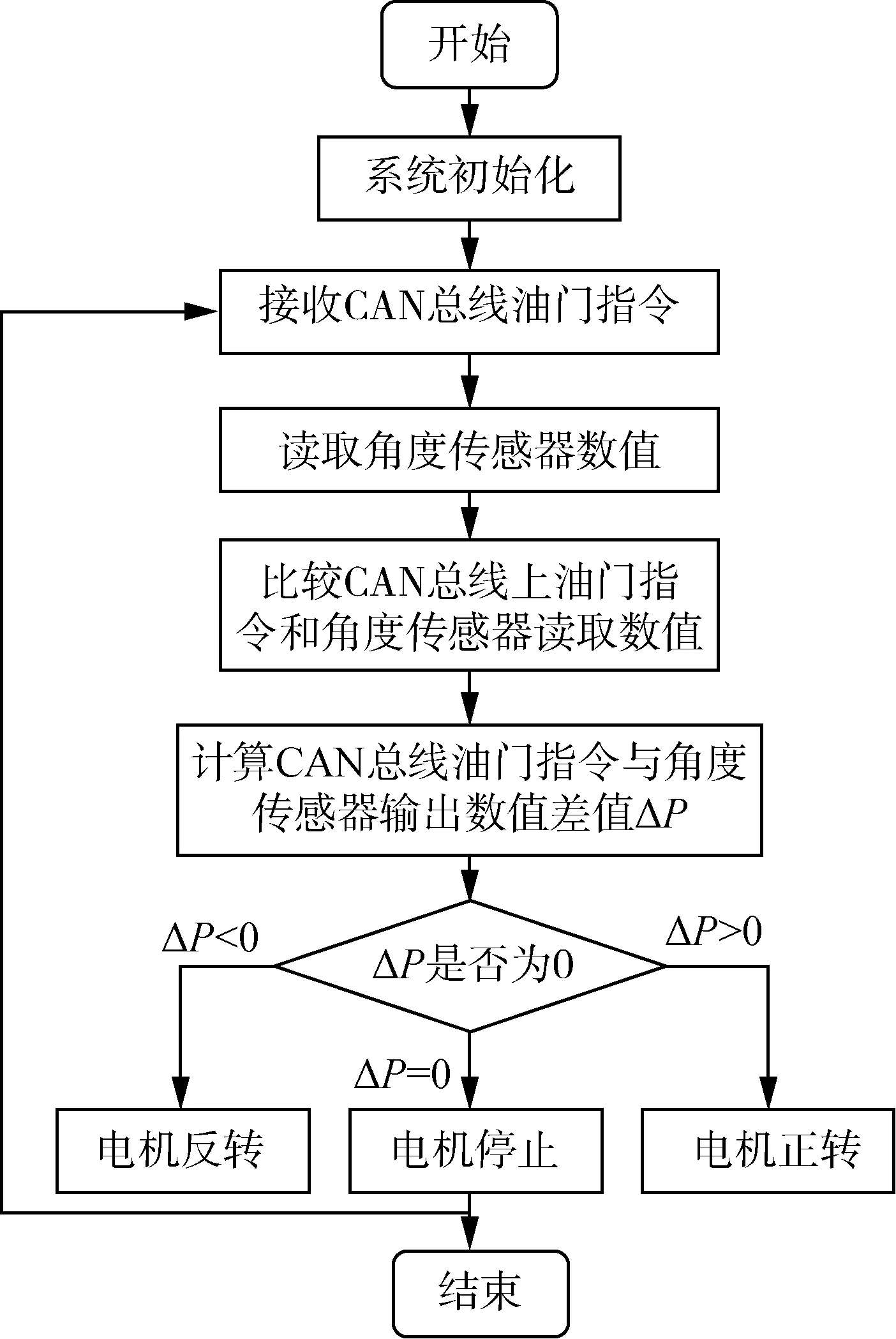
图5 油门控制器工作流程图
系统初始化后,首先接收CAN总线上的油门指令,对指令进行标度变换,变换后数值为P1;读取角度传感器的模拟输出值并通过A/D转换器的转换端口读取角度传感器反馈的数值P2,进行比较CAN总线油门指令与角度传感器输出指令差值ΔP的大小,控制S1、S2、S3、S4的通断,实现电机的正反转。当ΔP>0时,S1和S4导通,S2和S3截止,减速电机正转;当ΔP<0 时,S2和S3导通,S1和S4截止,减速电机反转;当ΔP=0时,减速电机停止运转,从而控制电机带动拉线轮旋转至期望角度。
ΔP=φ1-φ2
(3)
式中: ΔP——采样时刻的角度误差;
φ1——期望角度值;
φ2——实际角度值。
3 试验测试与结果分析
为了实际验证所研制的油门自动控制系统性能,将所研制的油门自动控制装置集成安装在自主研发的无人驾驶高地隙植保机上,在2021年5月15—17日在山东理工大学无人农场进行了田间作业性能测试,见图6。所测发动机为常柴牌3M78柴油机,标定转速和标定功率分别为2 600 r/min、15.2 kW。

图6 田间试验
将转速传感器安置在发动机飞轮上来测量发动机输出转速,由于脉冲信号的频率与飞轮的转速成正比,故可以通过计算脉冲信号的频率和飞轮的齿数,从而得到发动机的转速。
研究记录了CAN总线设定角度指令在[0°,70°]范围内拉线轮实际转动角度及高地隙植保机发动机转速数据,并计算不同角度指令所对应角度相对误差、发动机最大转速误差、平均转速、标准偏差、相对标准偏差。图7为设定角度与拉线轮转动角度关系曲线图,图8所示为拉线轮转动角度分别为0°(起始位置)、5°、35°、55°、70°(最大转动角度)时所测发动机转速变化曲线,实际试验数据见表3。

表3 测试结果与数据分析

图7 转角测量曲线图
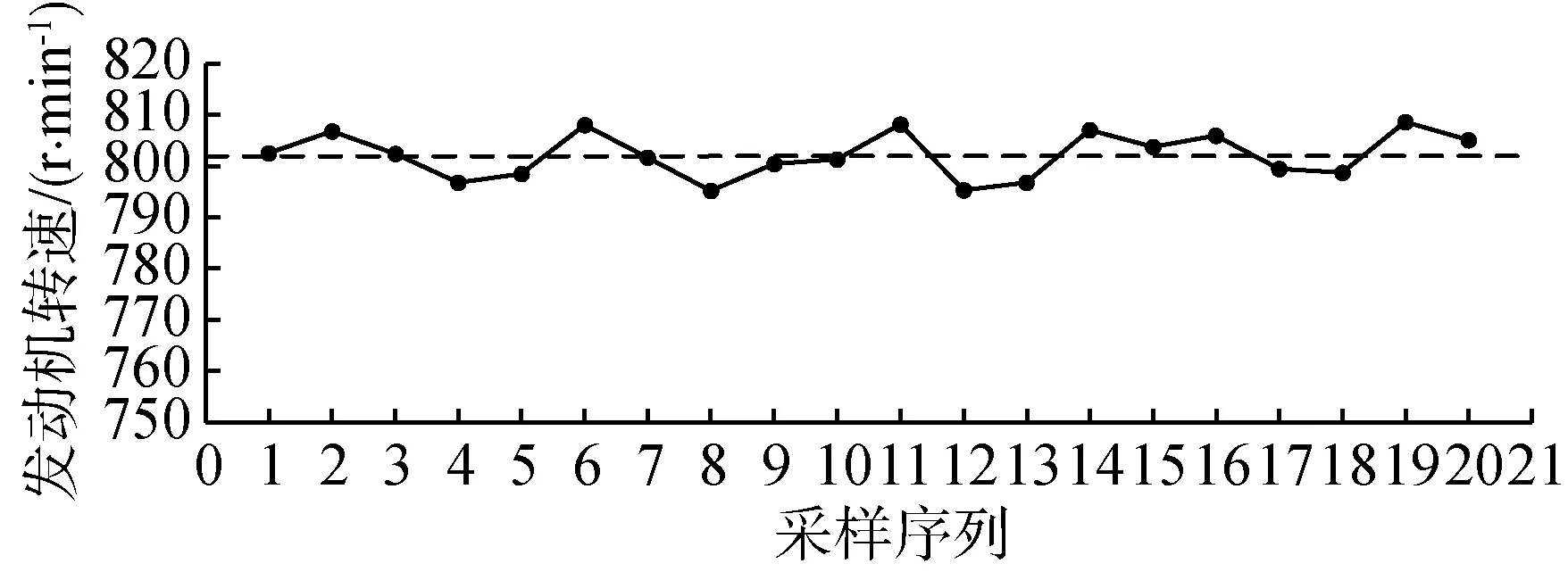
(a) 0°
田间试验表明,本文所研制的油门自动控制系统在[0°,70°]范围内,角度相对误差不超过4%;发动机转速误差最大值发生在角度指令为65°时,为19.8 r/min,发动机转速误差最小值发生在角度指令为50°时,为10 r/min,最小标准偏差和最大标准偏差发生50°和55°时,分别为3.03 r/min、6.33 r/min,相对标准偏差≤0.55%。
试验结果表明本文所设计的油门自动控制装置能够实时准确执行遥控操作指令,实现油门的自动调节,具备良好的控制稳定性和可靠性,能够满足自动导航和无人驾驶系统对农业机械油门自动控制的要求。
为验证油门指令与发动机转速之间的规律,本文对所测量的数据区间进行线性拟合,如图9所示,经计算,拟合度R2为0.982,表明线性拟合度极高,即理论上本文所研制的油门自动控制系统工作过程中油门指令与发动机转速之间符合一次函数关系,研究可以对油门的精准控制策略提供理论和技术指导。
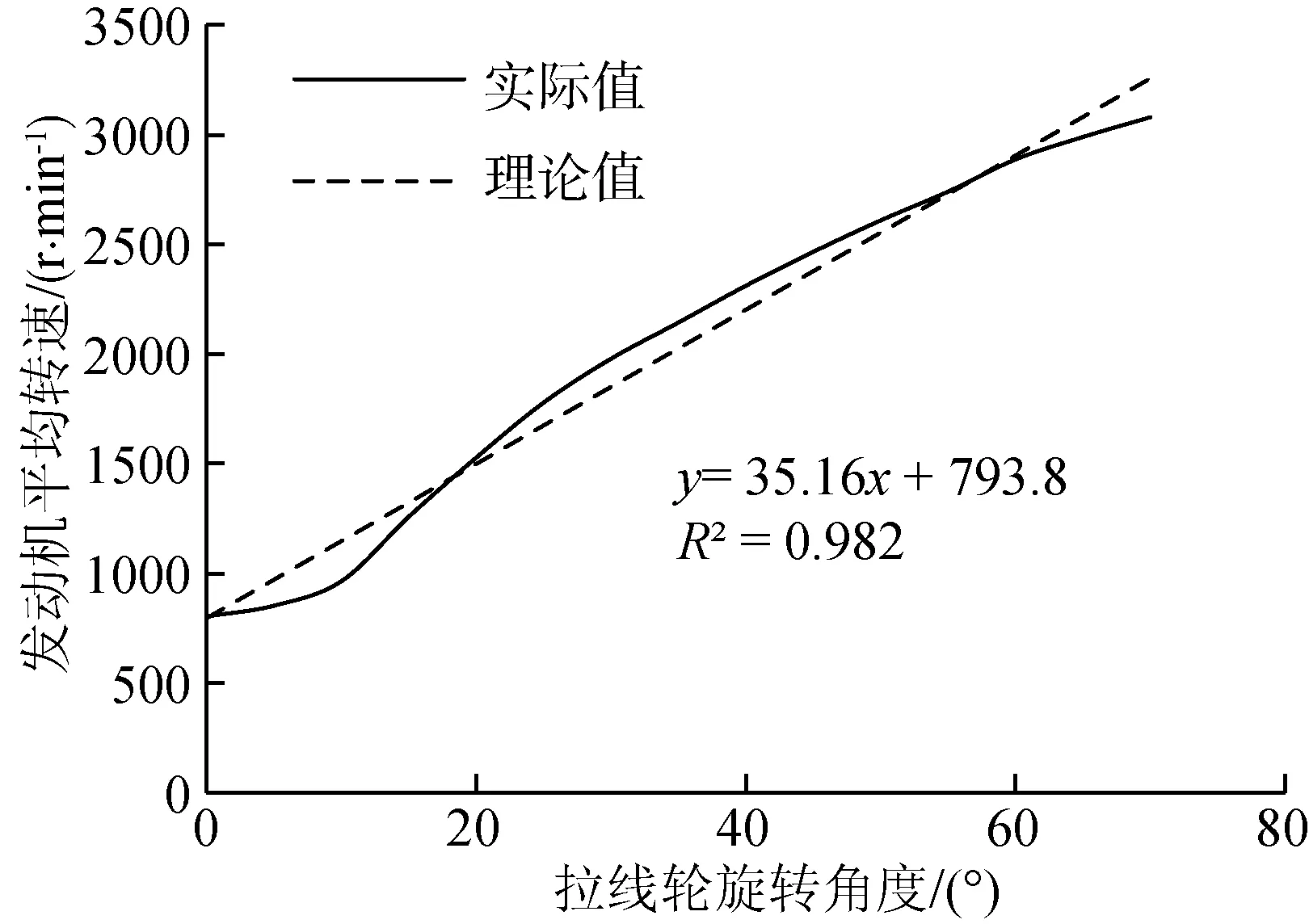
图9 线性拟合曲线
4 结论
针对农业无人驾驶系统对高地隙植保机提出的油门自动控制需求,研制了以直流电机为动力源、以PIC单片机为核心处理器的油门自动控制系统,主要包括油门控制器、直流减速电机、电机驱动器、角度传感器、拉线轮等。所研制的高地隙植保机油门自动控制系统易于安装,在遇到地面松软、高低不平或者发生振动等复杂的作业环境时也能精确的完成转角的测量。
1) 根据高地隙植保机发动机油门动作原理,进行自动油门装置的总体结构设计,对直流电机、角度传感器进行选型,加工制作零部件并完成了自动油门装置的组装和调试。
2) 所设计制作的油门控制器,以PIC单片机为核心处理器,通过CAN总线接收油门指令,实时比较目标旋转角度和实际旋转角度,并将控制信号发送至电机驱动器,控制电机正反转以带动拉线轮旋转至期望角度,实现油门大小自动的调节。
3) 田间试验表明,所研制的油门自动控制系统在[0°,70°]范围内,角度相对误差不超过4%;发动机转速误差最大值发生在角度指令为65°时,为19.8 r/min,发动机转速误差最小值发生在角度指令为50°时,为10 r/min;发动机转速最小标准偏差和最大标准偏差发生在50°和55°时,分别为3.03 r/min、6.33 r/min,相对标准偏差≤0.55%。表明本文所设计的油门自动控制系统具备良好的控制稳定性和可靠性,能够满足自动导航和无人驾驶系统对农业机械油门自动控制的要求。
猜你喜欢
今日农业(2022年13期)2022-09-15
北京支部生活(2022年5期)2022-05-24
时代报告(2022年3期)2022-05-05
科学与财富(2019年23期)2019-10-21
农民致富之友(2018年21期)2018-12-27
科技资讯(2017年1期)2017-03-27
农家科技(2016年7期)2016-10-20
汽车之友(2016年10期)2016-05-16
轻兵器(2015年23期)2015-09-10