
面向复杂机械零件形貌测量的高精度三维重建方法
2022-07-01 10:42韩笑么瑞轩
装备维修技术 2022年7期
关键词:高精度
韩笑 么瑞轩
摘 要:通常,机械零件的测量应满足高精度和高效率的要求,并且由于表面光滑、纹理不完整和结构复杂,机械零件的测量更具挑战性。若要取得非常精确的对应结果,请使用绝对置换对应,首先是对影像进行极座标校正,然后使用以点为基础的对应方法,将影像的左右立体声化。因此建议采取相应的方法以提高相位曲线的质量,并在相位提取和立体匹配过程中提高重建的零件云的精度。基于此,本篇文章对面向复杂机械零件形貌测量的高精度三维重建方法进行研究,以供参考。
关键词:复杂机械零件;形貌测量;高精度;三维重建方法
1三维重建相关概述
三维重建(3Dreconstruction)是一个过程,用于创建真实场景的曲面形状,广泛用于运输、工业、国防和其他行业。常用的三维重建方法通过将活动编码的图案投影到被测场景上来实现被测场景的高密度三维重建。由于编码模型具有活动的投影特性,因此此方法也称为“结构光三维测量方法”。与红外编码和颜色编码方法相比,基于蓝边投影的结构化光三维测量方法具有高测量精度和高测量精度的优点,对被测对象的环境光线和表面反射特性等外部因素不敏感,因此适用由于结构化光源的三维测量方法本质上是一种光学三维测量方法,限制了测量区域和被测零件的自发光效果,因此只能从一个角度测量被测对象表面的局部三维形状信息。若要取得零件表面的完整3D形状资讯,您必须变更度量零件的不同透视(也称为3D扫描),并将局部3D度量资讯注册到统一的世界座标系统中。此过程的关键在于精确恢复每个测量视图在世界坐标系中的状态。研究人员通过提高连续配准精度和三维扫描结构中的三维轻量化设备的全局优化来消除累积误差。
2实验及结果分析
本文的实验对象是FSW逆变器,图1显示了该部分的前视图和后视图。零件表面结构复杂,轮廓变化剧烈,铜、硬区域多,顶部有许多波纹,是复杂的机械零件之一。在测试过程中,会将频率为70、64和59的条纹图案投影到零件表面,每个图案共有4条条纹,共12条条纹。提取零件表面的调制边图像后,将使用相位转移方法分析图像以获得压缩相位图。然后用多频外推法将相位展开70频率,得到绝对相位图。在实验中,您可以使用不同的步骤校正方法或步骤对应方法。
2.1逐区域相位校正方法实验结果及分析
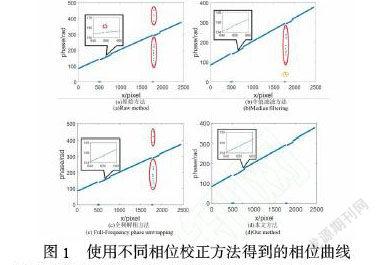
为了了解逐步校正方法的效果,本文将使用中值滤波和全强度去噪方法进行比较,结果如图2所示。图2(a)是原始的相位图,并且在远离相位曲线的地方有红色圆圈和红色刻度线标记的跳线。图2 b使用中值滤波方法;图2 c使用全强度去噪方法;图2(d)使用了本文档中建议的区域特定的增量修复方法。为了进行比较,可以看到中间值滤波方法可以消除跳变误差和一些杂色,但它会产生新的杂色,如图2(b)中的黄色圆圈所示。「实色去底色」方法可以消除潜变,但不能移除远离曲线的杂点。本文首先根据公式去除跳变误差,然后用区域相关相位校正方法去除远离相位曲线的噪声点。测试表明,这种方法可以消除与相位曲线相距很远的跳线误差和杂色,如图2(d)所示。
2.2结合曲线拟合的相位匹配方法实验结果及分析
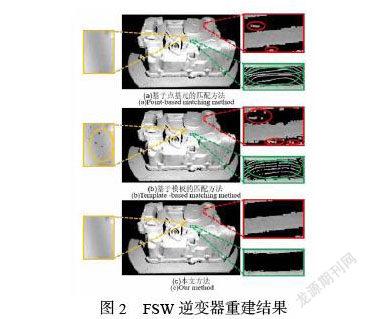
利用基于点基的等价方法、基于模型的等价方法和该方法对FSW逆变器进行重构,并对重构后的点云进行比较分析,如图3所示。为了更好地比較这三种方法在重建复杂零件时的优缺点,增加了噪声点和空洞的暴露区域,例如波纹的边界区域、特定弧度的平面区域和仅使用一台相机拍摄的波纹的边界区域。它们的锯齿状边界区域以红色矩形框表示;具有特定半径的平面区域以黄色矩形方块表示;只有从一个相机拍摄的锯齿波的边界区域以绿色方框表示。
在绿色矩形盒中标记的大部分区域在拍摄过程中只使用一台相机拍摄,同时它位于具有较小半径且每个像素的变化幅度较小的雕刻的顶部和底部相交处。因此,在此行业中,很容易导致不兼容,从而导致重建结果出现一系列杂色。由于这种不兼容很难在立体匹配阶段消除,因此基于点序列的匹配方法和基于模型的匹配方法都具有上述噪声点簇,如图3 a和图3(b)所示的绿色椭圆。此文件中的方法会根据每个像素与邻近像素之间的平均距离来精细地对应差异,以有效地移除此类冲突点,如图3(c)所示。为了更好地证明该算法的有效性,将三种方法重建的点云与标准零件模型进行了比较,并计算了平均分布。
3研究展望
在机械零件的三维重建中,不仅要考虑重建方法的精度,还要考虑行业的实时要求。本文中机械零件的三维模型可以很好地利用结构化轻量化的三维重建技术进行重建,但还存在一些不足,今后的改进和完善可着重于以下几个方面:(1)这里然后,诸如ZSD、SGBM和AD等算法在望远镜阵列中可以保持左右相机的互易性,以获得更精确的平行图像并改进点云。(2)多频非均匀三维重建中的相位精度直接影响点云重建精度。在结构化的光机中,存在非线性的反问题,导致了预测的蓝色边的非蓝色变化,从而导致了四步偏移中的相位误差,并影响了点云的重建精度。结构性光学仪器的非线性误差主要是伽玛变换引起的。在跟踪研究中,可以执行光学机器或灰度系数校正的非线性反校正,以使边缘图像更接近理想的蓝色条纹,并提高点云的重建精度。(3)本文件使用四个阶段转换和三个阶段的异质结来计算阶段,因此左右相机必须从测量的目标收集12个图面影像,而过多的影像则无法促进机械零件的即时重建。今后,我们将探索深度学习技术和变量方法的组合,以减少投影模型的数量,并实现实时的三维重建,以确保阶段的准确性。
结束语
机械零件是复杂机械设备的重要组成部分。轴的数字模型重建为机械制造和装配奠定了基础,提高了装配效率和自动化水平,在工业生产中非常重要。为了提高后续识别工作的搜索效率,建立了Kd树的数据结构,并利用最优邻域实现了基于特征描述的聚类识别算法。分割后,每个属性点云都可以使用基本库模板识别和检索,然后将属性匹配到组件库中以确定组件的几何属性和结构组成。最后,研究了基于无抽样一致性算法的点云模型参数化问题。为计算模型的轴和半径、沿轴投影点云以及计算模型高度等参数安装曲面。此时,将定义零件的模型类型、结构特性和模型参数。重建系统从一个角度收集零件信息,从而克服了Kinect传感器采集精度低和数据不完整的问题,满足了轴重建的要求,重建了完整的三维模型。
参考文献:
[1]韩瑞路.航空发动机叶片类零件三维重建与缺陷检测关键技术研究[D].北方工业大学,2020.000148.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
交通科技与管理(2022年8期)2022-05-07
科学家(2022年3期)2022-04-11
科学与财富(2021年34期)2021-05-10
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
科学与财富(2016年15期)2016-11-24
科教导刊·电子版(2016年10期)2016-06-02
轻兵器(2015年16期)2015-09-10
中国信息化·学术版(2013年5期)2013-10-09
