五相混合式步进电动机微步开环缺一相容错控制
2022-07-11 13:34周洁茹
微特电机 2022年6期
周洁茹,洪 榛
(浙江工业大学 信息工程学院,杭州 310023)
0 引 言
混合式步进电动机转子采用轴向永磁体励磁、定子/转子多齿结构,实现了电机大负载、无累积误差步进旋转运行;电机具有制造成本低廉、效率高、分辨率高等特点,在自动控制系统中获得广泛应用。
从定子绕组产生旋转磁动势与转子永磁体磁场作用形成电磁转矩的角度出发,混合式步进电动机定子绕组有两相、三相、五相等之分,其中五相结构电机具有角分辨率更高、制动阻尼效果更佳、振动更低、转速负载能力更高等优点,获得工业界的重视和研究[1-2]。
混合式步进电动机兼具步进电动机和永磁同步电动机的优点,实际采用的控制策略主要有两种:一种是转子位置角开环微步控制;另一种是转子位置角闭环控制。前者由于需要的硬件资源较少,同时又具备转子高分辨率、无累积误差的旋转特点,率先在工业中获得广泛应用,目前学者们利用定量化反馈、模糊控制、电子阻尼等现代控制理论,进一步优化设计出性能更优的开环微步控制系统[3-5];后者需要位置角传感器及更加复杂的控制算法,硬件资源要求较多,目前学者们针对混合式步进电动机磁场定向控制方案较多地研究了转矩-电流比最大策略、参数变化鲁棒抑制策略、无传感器策略、转子旋转脉动补偿策略等[6-11]。目前,针对两相混合式步进电动机控制策略研究较多,而多相,尤其五相混合式步进电动机控制策略的研究还较少。
文献[12]利用PIC单片机及五相逆变桥实现了星形连接五相混合式步进电动机高达1 000微步控制。文献[13]为了进一步抑制五相混合式步进电动机旋转的脉动,提出一种基于FPGA的非线性微步控制策略;利用简化的定转子之间的磁链模型,计算出磁导分布,进一步建立等效磁路,从而推导出非线性模型。文献[14]针对应用于伺服系统中五相混合式步进电动机,提出考虑磁饱和的改进型特性分析方法。文献[15]为进一步减小五相混合式步进电动机磁场定向矢量控制运行噪声、提高系统整体效率,提出一种可抑制三次谐波的五相混合式步进电动机空间矢量脉宽调制优化控制策略。
多相混合式步进电动机采用了更多的功率开关控制多相绕组,例如本文研究对象五相混合式步进电动机微步开环驱动系统需要10个功率开关构成五相逆变桥臂,当其中部分功率开关或绕组发生故障后,如何继续保持电机不间断容错运行是目前大规模自动控制系统高可靠性运行期待解决的关键问题之一。当某个桥臂中部分功率开关发生故障,可以将该逆变桥臂与其他无故障桥臂断开,对应电机绕组无电流流过,可以将该故障归纳为电机缺相故障。电机出现缺相故障后,定子侧激磁处于不对称状态,使得转子运行不平稳,甚至无法连续运行。为此,本文针对五相混合式步进电动机微步开环驱动系统缺一相后不间断容错控制进行研究。
1 缺相容错微步控制策略
1.1 缺一相电机数学模型
五相混合式步进电动机定子上有10个磁极,每一个磁极铁心上套装一个集中线圈,空间对称的两个线圈正向串联构成一相绕组,由此构成A~E五相对称绕组;同时,定子每一磁极端面加工成小齿结构。转子由两段铁心中间夹着轴向充磁的永磁体构成,每一段转子铁心外表面加工成50个小齿结构,两段转子铁心齿相互错开半个齿距角。根据其结构,五相混合式步进电动机可以等效为磁极对数为50的五相永磁同步电动机,但与普通的永磁同步电动机不同之处:(1)由于磁极对数很高,若采用矢量闭环控制,则电机中高转速区很难实现电流的实时闭环控制,同时也难以产生较大的转矩输出;(2)由于多齿结构,采用开环步进控制可以较容易获得转子位置的精确控制,若进一步结合电流微步方式,可以进一步获得更加平稳的转子旋转无累积误差的控制。
本文以A相绕组缺失为例,当其他相绕组缺失后都可以通过重新定义坐标系方式转化为本文缺失A相情况。采用五相逆变器控制步进电动机,逆变器与步进电动机之间的连接如图1所示,其中UDC为直流母线电压。Si(i=A~E)为桥臂开关状态,1表示上管导通,下管关断;0表示开关状态刚好相反。

图1 五相逆变器与五相步进电动机连接示意图
为了方便本文控制策略的阐述,定义缺A相,缺相后步进电动机机电能量转换坐标系如图2所示。A~E分别为A~E相绕组轴线;α,β为基波静止坐标系;θr为转子位置角;us,is,ψs,ψr分别为定子电压矢量、定子电流矢量、定子磁链矢量和转子磁链矢量。为了实现缺失一相后步进电动机转子平稳运行,以及实现电机绕组由无故障不间断平滑运行至缺相运行状态,定义虚拟定子电压矢量、虚拟定子电流矢量、虚拟定子磁链矢量和虚拟转子磁链矢量分别为uxs、ixs、ψxs、ψxr;上述矢量在α,β轴的投影分别用下标α,β标示,在A~E轴上的投影分别用下标A~E标示。当电机缺A相后,除了机电能量转换α,β两自由度外,还存在非机电能量转换的零序轴系z1和z2。
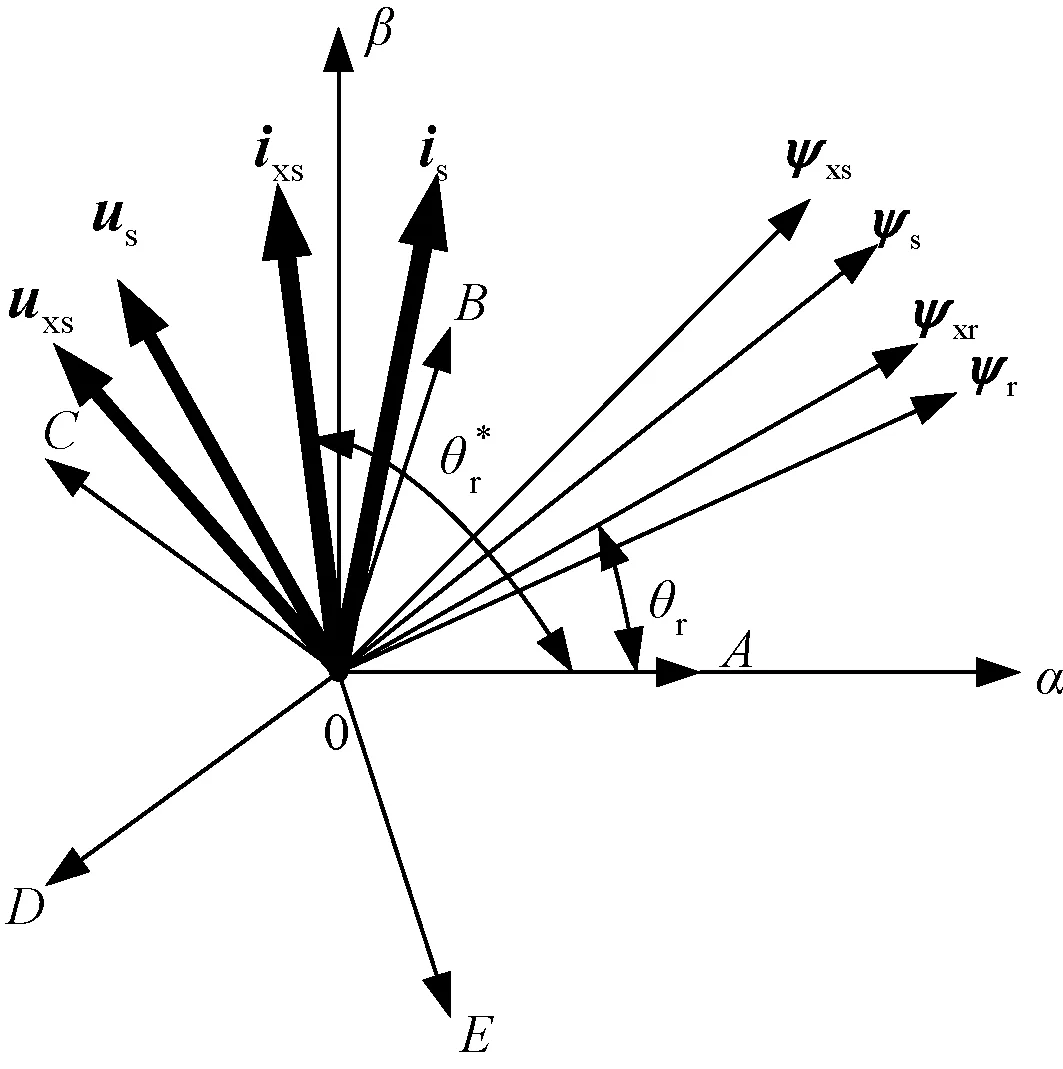
图2 基波坐标系定义
根据绕组相电压与绕组电阻压降、感应电动势之间平衡关系,建立缺A相后剩余健康四相电压平衡方程式如下:
(1)
式中:Rs为相绕组电阻。
根据绕组磁链与自电感磁链、互电感磁链及永磁体磁链平衡关系,建立缺A相后剩余健康四相定子磁链平衡方程式如下:
(2)
式中:ρ=2π/5,为相邻绕组轴线夹角;ψf为相绕组耦合永磁体磁链幅值;L为剩余健康四相定子电感矩阵。根据电机学中绕组自感及绕组之间的互感概念,建立缺A相绕组后,剩余健康四相定子电感矩阵如下:
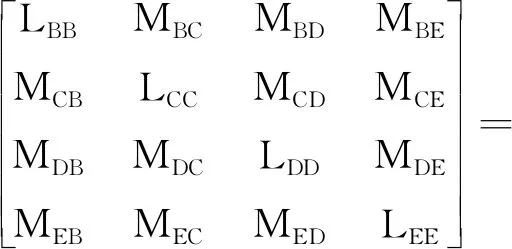
(3)
式中:Lii为第i相自电感,Mij为i相与j相之间互电感(i,j=B~E且ij);Lsσ为绕组漏电感;Lms绕组主电感幅值;I4为4×4单位阵。
根据文献[16]交流电机坐标变换理论,当电机缺A相后,剩余健康四相电机B~E自然坐标系数学模型可以通过T4恒功率正交变换矩阵变换至αβz1z2轴系上,具体的T4变换矩阵依照文献[15]方法建立如下:
(4)
利用式(4)把式(1)、式(2)变换至αβz1z2坐标轴系中,结果如下:
(5)
(6)
各量的具体变换方法用下式统一表示(x=u,i,ψ):
(7)
这样,根据式(6)定子磁链具体形式获得缺A相后电机磁共能,然后磁共能对电机转子机械位置角求偏微分,得电磁转矩如下:

(8)

1.2 缺相容错微步控制
通过上述分析获知,缺A相后采用维持αβ轴电流相同幅值、正交特性的微步开环控制,出现电磁转矩脉动的主要原因是式(6)定子磁链模型不对称特性,磁链不对称直接导致式(8)中磁链和电流的乘积项系数不同,从而引起了很大的转矩脉动。因此,如何获得电机缺A相后的对称数学模型是降低甚至消除转矩脉动的关键。为此,基于式(6)不对称特性根源分析,定义如下虚拟定子磁链及虚拟定子电流:
(9)
(10)
根据式(9)、式(10),式(6)中ψsα,ψsβ表达式进一步化简为虚拟变量形式如下:
(11)
从式(11)可见,基于虚拟定子磁链及虚拟定子电流变量的磁链数学模型重新达到对称状态。
把式(9)、式(10)定子磁链及定子电流与对应的虚拟变量关系代入式(8)中,进一步建立基于虚拟变量的电磁转矩如下:

(12)
由式(12)可见,基于虚拟变量的电磁转矩达到对称状态,联合式(11)、式(12),缺A相后采用维持αβ轴虚拟电流相同幅值、正交特性的微步开环控制,可以获得圆形虚拟磁链轨迹,同时可以获得平稳的电磁转矩输出。
若设如下形式的虚拟定子电流:
(13)

将式(13)代入式(12)中,得基于虚拟电流的微步开环电磁转矩如下:
(14)

1.3 缺相容错微步电流闭环控制器
同样,为了获得对称的定子电流αβ平面数学模型,便于对虚拟定子电流进行闭环控制,定义虚拟定子电压如下:
(15)
根据式(15)、式(10)、式(9)、式(6),进一步建立αβ虚拟定子电压平衡方程式如下:
(16)
式中:ωr为转子旋转电角速度。
由式(16)可见,利用αβ轴虚拟定子电压uxsα,uxsβ可以对αβ轴虚拟定子电流ixsα,ixsβ进行控制。αβ通道的时间常数τα,τβ分别如下:
(17)
αβ通道的时间常数具有τβ≈5τα/3的关系,两通道特性不对称。进一步利用电流PI控制器方式实现αβ轴虚拟电流闭环控制结构如图3所示,其中,Kp及KI分别为比例系数、积分系数。
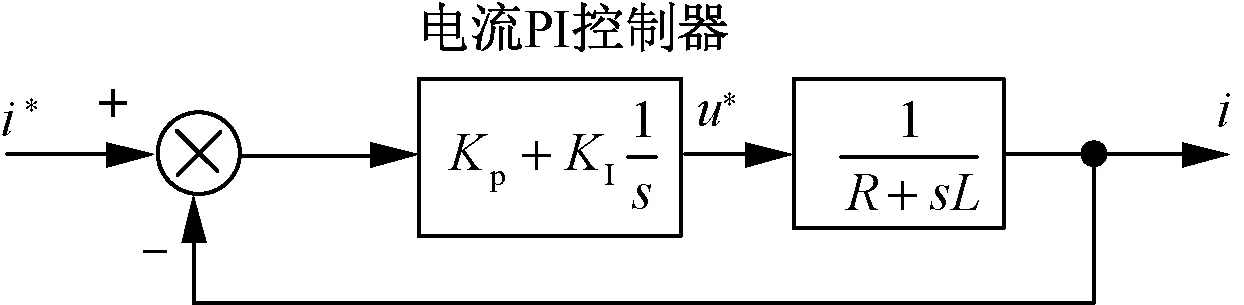
α轴:β轴: 图3 αβ轴虚拟电流闭环控制结构
根据图3,可以分别建立αβ轴虚拟电流闭环控制传递函数如下:

(18)
式中:ξ=0.5(R+Kp)/KI为阻尼比;ωn=KI/L为系统固有振荡角频率。
当其幅频特性20lg|Gcl(jω)|=-3 dB时,带宽为ωc,得:
(19)
联立式(19)及阻尼比公式,求解得:
(20)

根据式(20),在保证αβ轴相同的阻尼比ξ和带宽ωc情况下,代入αβ轴各自的R及L,即可求出各自的PI控制器比例系数和积分系数,从而保证αβ轴虚拟电流闭环具有相同的控制特性。
根据图1逆变器与电机绕组之间的连接关系,在忽略剩余健康四相相电压之和情况下,一组确定的剩余健康四相开关组合SB~SE对应的αβz1轴电压如下:
(21)
式(21)依据伏秒平衡原理,可以建立剩余健康四相逆变桥臂开关占空比DB~DE如下:
(22)
1.4 绕组故障前后电流幅值关系
绕组无故障时可以利用T5恒磁通变换矩阵将实际五相电流变换至αβ坐标系,进一步根据磁共能对转子机械角求偏导得到电磁转矩。具体如下:
(23)
Te=2.5pψf(isβcosθr-isαsinθr)
(24)
假设如下形式的αβ轴电流给定:
(25)
式中:Im0为绕组无故障时αβ轴电流幅值。
把式(25)代入式(24),得绕组无故障时步进电动机微步开环控制电磁转矩如下:
(26)
(27)
由式(27)可见,绕组故障前αβ轴电流幅值与绕组缺相后αβ轴虚拟电流幅值关系如下:
(28)
1.5 绕组故障后零序电流控制
当电机缺A相后,除了机电能量转换αβ两自由度外,还存在非机电能量转换的零序轴系z1和z2。由于剩余健康四相电流之和仍然等于零,所以零序轴系z1和z2中只有一个可控,本文选择iz1零序电流进行控制。若将iz1零序电流控制为0,则会引起剩余健康四相电流幅值不平衡,从而直接危害流过最大电流的逆变器桥臂功率开关的安全工作,为此有必要实现剩余健康四相电流幅值平衡。
设缺失A相后,剩余健康四相电流可以表示:
Isi=xicosθ+yisinθ
(29)
式中:i=B~E。
尽管缺失A相,但若要实现转子平稳运行,定子绕组仍然要产生圆形轨迹磁动势,满足条件如下:
(30)
由于剩余健康四相绕组电流之和等于零,所以:
(31)
为了实现剩余健康四相电流幅值平衡,需:
(32)
联立式(30)~式(32),求得电流幅值最小解如下:
(33)
利用T4变换矩阵将式(33)变换至αβz1轴系,然后再结合式(10)可以推导出iz1零序电流与虚拟定子电流ixsα、ixsβ关系如下:
isz1=0.620 2ixsα-0.320 7ixsβ
(34)
零序电流按照式(34)进行控制,即可实现剩余健康四相电流幅值平衡且最小。
根据上述原理,本文建立五相混合式步进电动机缺一相微步开环控制系统结构框图,如图4所示。为了进一步抑制转子振荡,采用文献[5]方法对给定位置角进行调制。
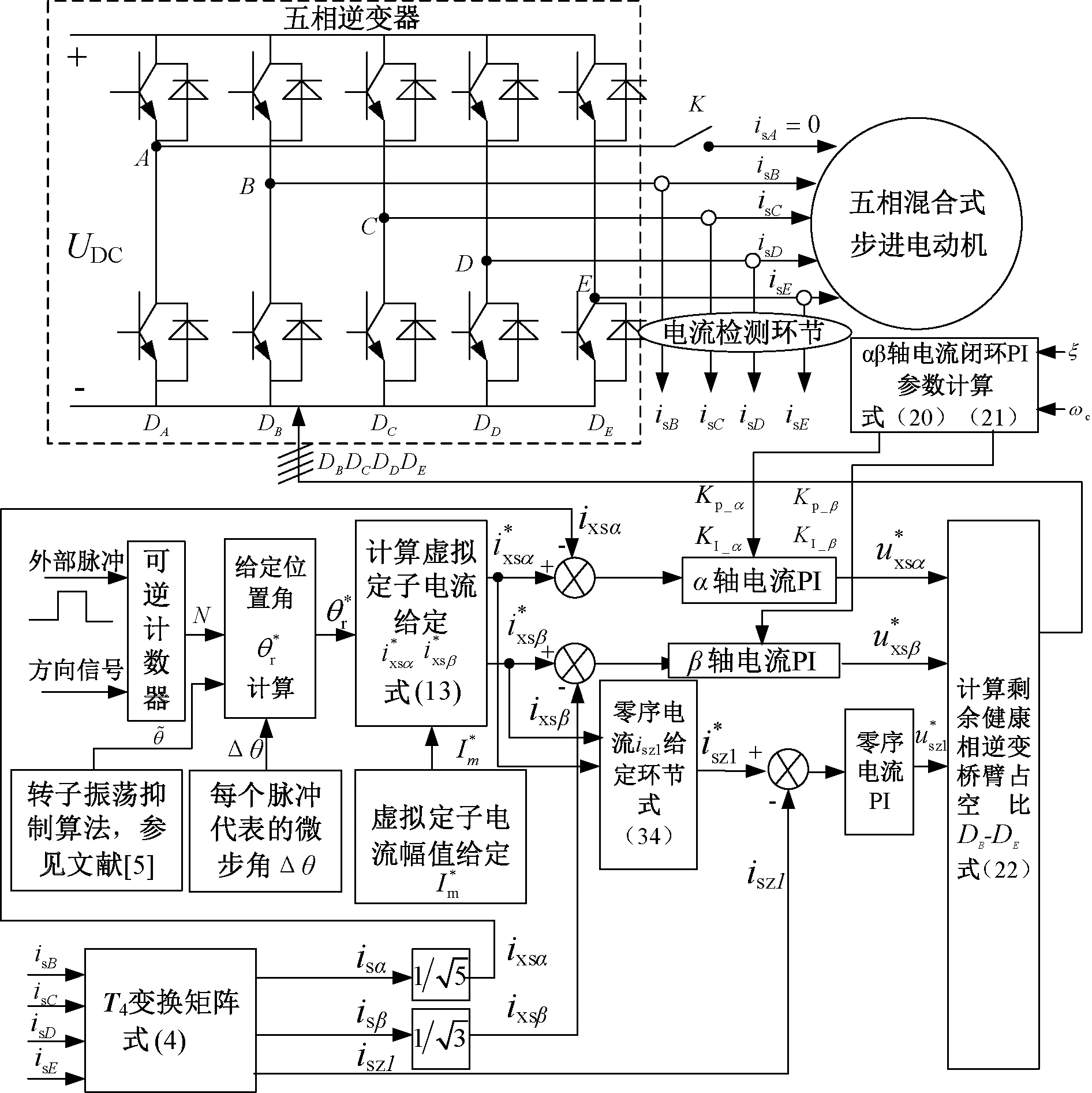
图4 缺一相微步开环控制系统结构框图
2 仿真研究
本文采用的五相混合式步进电动机额定参数如表1所示。电机带负载3 N·m,绕组无故障时相绕组电流幅值为7 A。数字控制周期25 μs,阻尼比取0.707,带宽取5 kHz,计算出来的α轴通道比例和积分系数分别约为108和77;β轴通道比例和积分系数分别约为106和75。

表1 五相混合式步进电动机参数
采用本文的控制策略,绕组由无故障稳态运行转换到缺A相稳态运行的仿真结果如图5所示。t0时刻之前步进电动机运行于绕组无故障状态,t0时刻之后步进电动机运行于绕组缺A相故障状态。
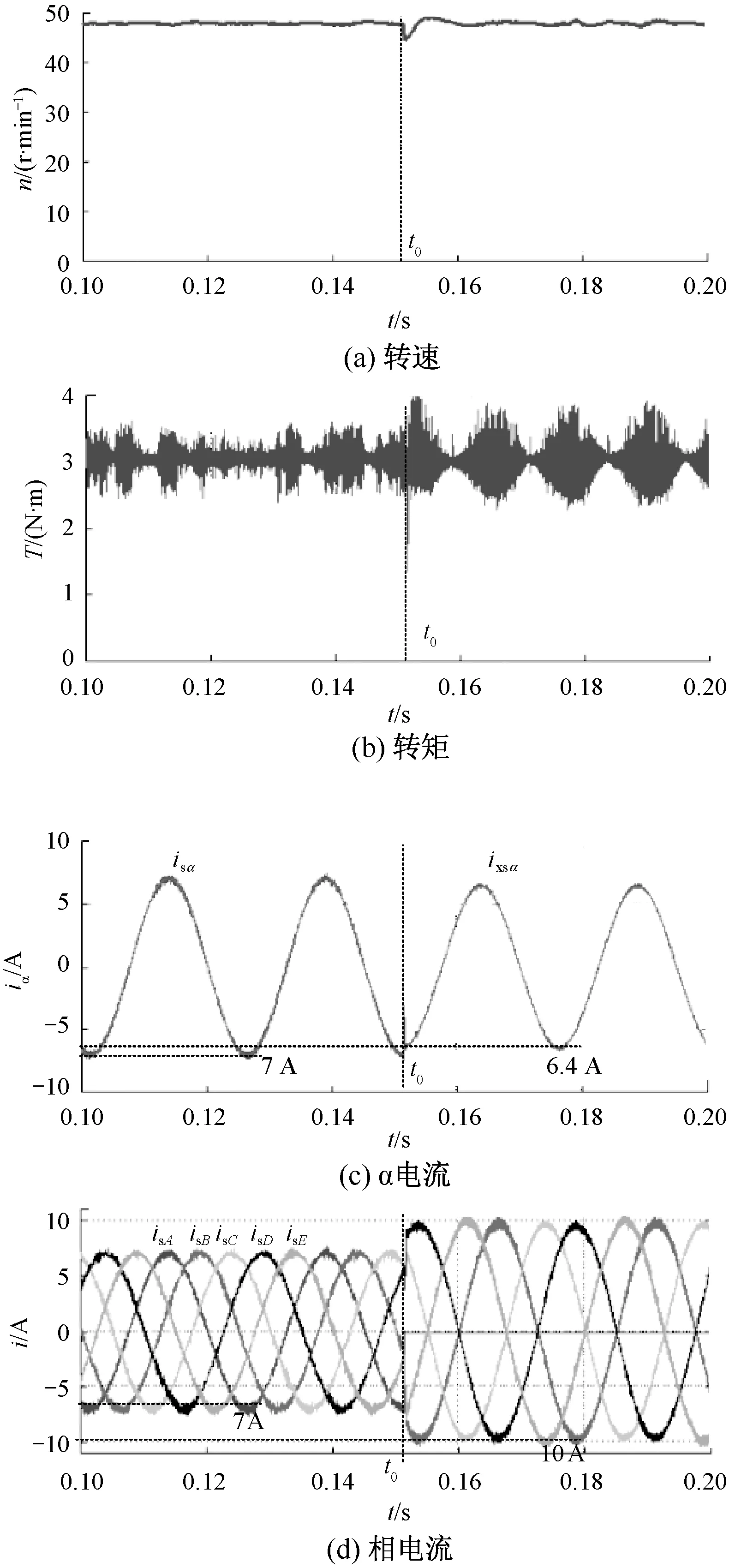
图5 采用本文策略实现绕组无故障到缺相运行转换仿真
从图5仿真结果可见:(1)步进电动机转速、电磁转矩在t0时刻前后变化较小,实现了电机由绕组无故障平滑不间断运行至绕组缺A相状态,实现了电机容错不间断运行功能;(2)绕组故障前后相电流幅值分别为7 A和10 A,缺A相后按照式(34)控制零序电流,实现了缺相后四相绕组幅值平衡;(3)绕组无故障之前运行于αβ轴电流闭环,而绕组缺A相后运行于αβ轴虚拟电流闭环,电流幅值分别为7 A和6.4 A,基本满足式(28)关系。
若仍然在t0时刻实现步进电动机由无故障稳态运行转换到缺A相稳态运行,但零序电流isz1没有按照式(34)进行控制而是控制为0,其对应的仿真结果中转速、转矩、αβ电流波形与图5一致,但相绕组电流波形如图6所示。可见零序电流isz1没有按照式(34)进行控制时,当电机绕组缺A相后,剩余健康四相绕组电流幅值不平衡;最大相电流幅值达到12 A,显然大于图5中的10 A。
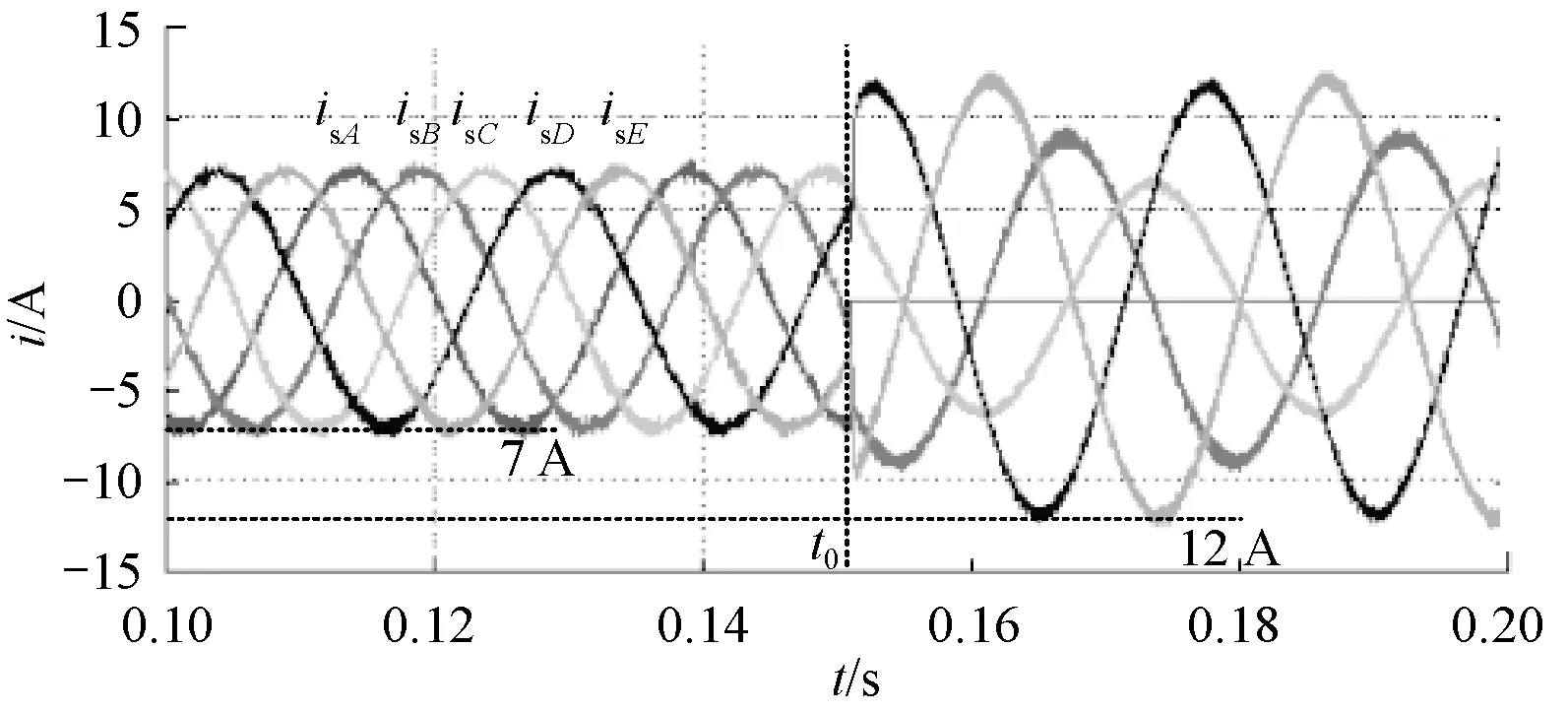
图6 缺相后零序电流isz1控制为零的仿真电流
若仍然在t0时刻实现步进电动机由绕组无故障转换至缺A相,且不采用本文的缺相运行控制策略,对应的仿真结果如图7所示。对比图5和图7仿真结果可见,没有采用本文的缺相运行控制策略,绕组缺A相后,电磁转矩、转速控制迅速崩溃,相绕组电流无法跟踪至稳定正弦波。总之,步进电动机缺相后无法稳定运行。

图7 不采用本文策略的绕组无故障到缺相运行仿真
3 结 语
本文针对微步开环控制五相混合式步进电动机驱动系统,提出一种缺一相容错控制策略,理论分析及仿真研究结果表明:
1)基于虚拟变量重新定义方法,可以实现电机缺一相后数学模型对称,消除了电磁转矩的脉动分量;
2)仿真结果表明,采用基于虚拟变量的对称数学模型构建微步控制驱动系统后,可以获得较低脉动的电磁转矩输出,电机转速更加平稳;
3)采用零序电流跟随αβ轴虚拟定子电流变化而变化的策略,可以实现电机缺相后剩余健康四相绕组电流幅值的平衡,减小了流过功率管的电流幅值;
4)电机可以由绕组无故障运行状态不间断运行至缺一相运行状态,提高了五相混合式步进电动机微步开环驱动系统的运行可靠性。
猜你喜欢
微电机(2022年8期)2022-10-12
防爆电机(2022年4期)2022-08-17
传感器与微系统(2022年3期)2022-03-23
防爆电机(2021年6期)2022-01-17
农村电气化(2021年10期)2021-10-19
防爆电机(2021年3期)2021-07-21
西安航空学院学报(2021年5期)2021-04-15
防爆电机(2021年1期)2021-03-29
建材发展导向(2020年15期)2020-08-06
微特电机(2019年7期)2019-08-02