基于改进型Smith预估控制器在安钢加热炉温度控制中的应用
2022-07-11 04:32宋强乔冠博
中国设备工程 2022年12期
宋强,乔冠博
(1.安阳工学院机械工程学院,河南 安阳 455000,;2.中山大学数学学院,广东 中山 528406)
传统的控制方式已经不能满足,需要做出改革,便有了温度与流量两方面的结合构成了大时滞的炉温控制系统,温度用来将测烟气热值,流量查看余氧的剩余量,两方面达到气体和空气的优化调节。这种比例对于炉子的高效燃烧控制和较快反应控制得到了良好实现。在纯滞后这一流程中并不能良好发挥,控制量由于控制通道的纯滞后对产生的干扰做不到及时反馈。使这一阶段会出现明显的过冲,也同时延长了调节它的时间。因此,想取得控制效果的完美产生的难度是很高的。传统意义上来说,滞后过程是建立在纯滞后τ和过程时间T的比值上的,界限值为0.5,大于0.5就很高了。相位滞后和过冲的增大,严重过冲这些问题都会在T比率增大时出现。对于滞后时间的控制依然需求广大研究者所着手联合开发。
1 加热炉串级控制模型
此类系统是存在双控制器的,能使两条回路快速作业,主子变量分别为炉温值与小滞后流量。控制质量的改良与炉温和流量的串级控制密切相关,从而大大降低工业成本。控制阀则被二级控制器控制的,但与此同时,后者又是被主控制器是的输出控制的。因此在此系统中,受控对象是有两方的,也就是主次对象,换而言之即温度和交通对象。显然控制参数也是有两方的,即温度与流量这双方。作为主控参是温度。主控参发出的信号被主控器接收到,辅控参信号这一测量值又会被次控器接收。同理会有两个闭合回路,即主次级回路也就是通常叫法上的内外回路(图1)。
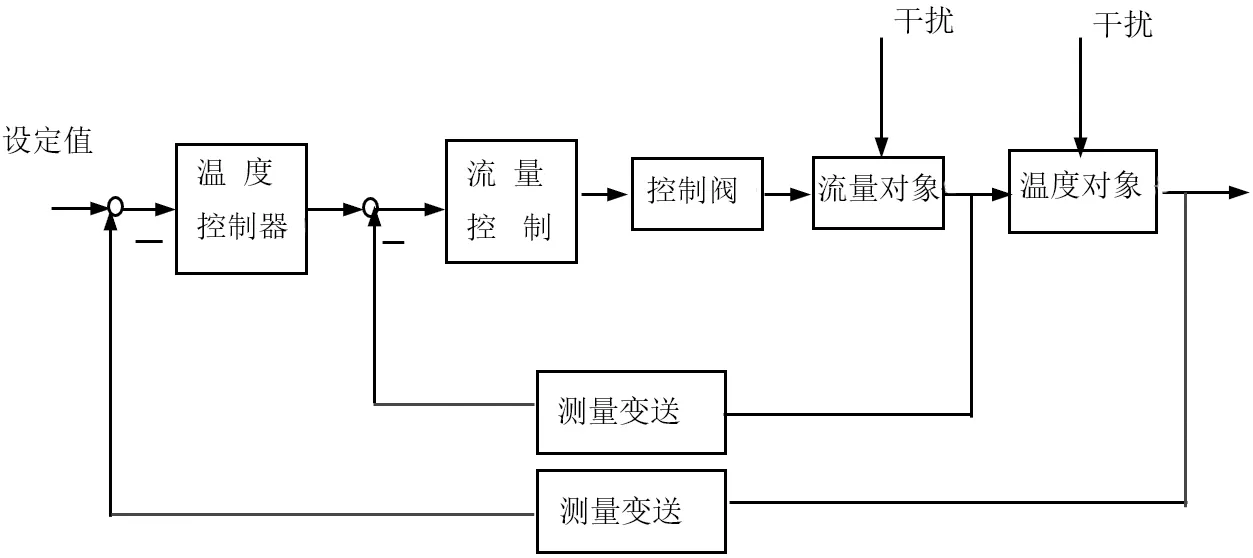
图1 加热炉温度串级控制系统结构方框图
它的工作过程其实是在一定干扰下主变量与辅助变量的预定值远离,其二者可以抗除扰动也使系统获得新的稳态。
2 改进型Smith预估控制器补偿方案
PID调节器其实也就是史米斯预测补偿控制的源动力,不断的信号发送到补偿器里。补偿器与过程的特征是息息相关的,在过程的数学模型和实际过程特征这两者是存在一定误差,因此,缺点时间越长,模型的误差也会越大。意思就是,敏感性在工艺特性变化时也会出乎意料的高。增益自适应预估补偿控制是可以抵制这个缺点的出现的。
图2所示便是上述方案的框图。一个除法器、一个领先的差分链路和一个乘法器在史密斯中得到增加。预测器的输出乘以导数链路的输出,这一操作必须先于前乘法器在将其输出到调节器发生,将乘法器在将其输出到调节器之前Td=τ,将预测器的输出乘以导数链路的输出。模型的输出信号与过程之间的比率是决定三条链路的功能的,预测器的增益则是通过这种手段自动校正。

图2 增益自适应补偿方案
由图2所得:


若τ=τm,则有:

由以上分析可知,增益自适应补偿器在改善控制性能方面具有与Smith史米斯补偿器相同的效果。
3 MATLAB仿真
在现实中非理论情况下,干扰有高有低,通常干扰是很大的,这对系统的稳定性则是很不利的。系统过冲增高,系统的调节时间变更久,不稳定的系统出现,故而这一研究是很有必要的。看此设计能否满足要求,在两个控制系统上去仿真这类干扰,便可知此法是否可行。仿真结果如图3和图4所示。
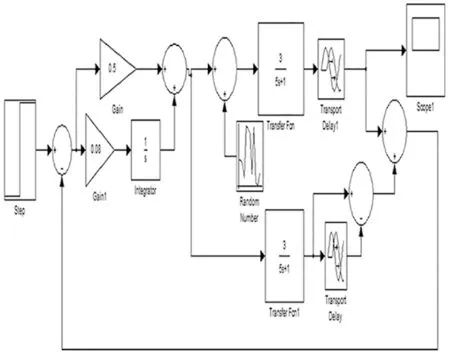
图3 Simulink框图

图4 加入扰动时Smith控制器响应图
要想达到控制效果上的完美,该系统若是受到了扰动,则做法不成功,从图3和图4中可显出,振荡和过冲在一定程度上还是不小的,稳态在过许久后,重稳的状态才会出现。
从图5和图6展示图像可知,当史米斯补偿控制系统和改进的Smith补偿控制系统增加干扰时,前者去抵制时间扰动并不是没有把握的,后者不存在超调这一情况。30s可使优化完成的Smith补偿控制系统重回稳定值,对干扰有很好的抑制作用。

图5 Simulink图
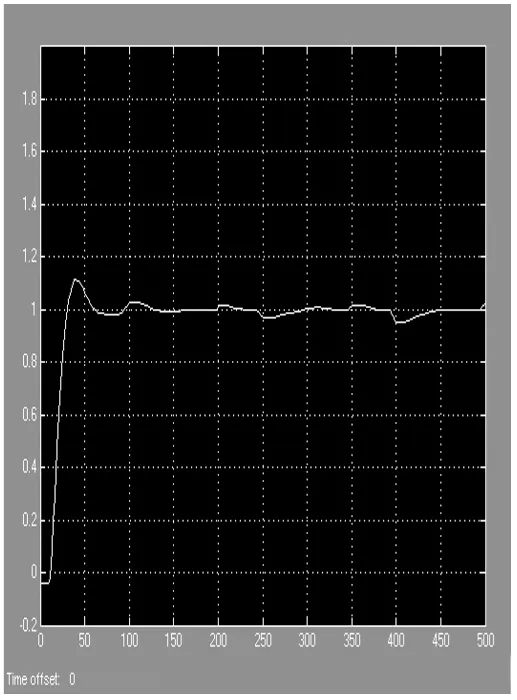
图6 加入扰动时改进型Smith控制器响应图
综上,本文提出了一种Smith预估控制器的使用方案,并进行了仿真,仿真结果良好有效。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
现代电力(2022年2期)2022-05-23
导弹与航天运载技术(2022年2期)2022-05-09
山东建筑大学学报(2021年6期)2021-12-23
北京航空航天大学学报(2021年7期)2021-08-13
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
玻璃(2019年3期)2019-04-01
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年1期)2017-11-24