无人机航摄中虚拟基站和物理基站PPK精度对比分析
2022-07-12 13:59解维果章汉武吴建华
测绘标准化 2022年2期
解维果 章汉武 吴建华
(江西师范大学地理与环境学院 江西南昌 330022)
近年来,无人机的快速发展使其在测绘、农业和电力等领域得到十分广泛的应用。在航空摄影测量方面,无人机已经成为非常重要的一个数据获取平台[1]。无人机航空摄影测量中,航片的POS数据是影响成果精度的关键因素之一。目前很多无人机航测项目,在作业过程中会结合实时动态(Real Time Kinematic,RTK)技术或动态后处理(Post Processed Kinematic,PPK)技术获取POS数据。RTK载波相位差分技术可实现实时高精度定位,但是RTK信号很容易受网络信号和周围环境等因素的影响,在长时间工作时容易丢失固定解。PPK是 GNSS 的一种差分方式,通过 OTF 初始化快速确定整周模糊度,通过基站(Base Station)和流动站(Rover)同时观测多个历元,进行事后基线解算,可以获得厘米级精度的三维空间位置信息[2]。外业测量时,观测10~30 s 就可以解算出厘米级的空间三维坐标[3]。与RTK不同,PPK 技术不需要基站和流动站之间的实时数据链通信,观测更为方便、自由,在外业观测结束后,对流动站与基准站GNSS接收机所采集的原始观测数据进行事后处理,得到流动站的三维坐标[4]。因此,PPK相对RTK作业距离显著增加[5]。
在进行无人机航空摄影测量时,使用PPK技术大多是在测区搭建物理基站,在无人机起飞之前开始接收数据,但是在地形复杂、信号较差的地区搭建物理基站很不方便,而且工作安全风险也较大。近些年兴起的网络PPK解算服务,虽然省去了搭建物理基站的麻烦,但网络PPK解算服务的兼容性差,服务地区也较少,且价格昂贵,对于小型航测项目来说大幅度增加了成本。而虚拟基站技术可以解决以上问题。利用虚拟基站技术,不需要到测区,只需使用开源软件RTKLIB[6-7],在室内或者任何一个有网络的地方搭建虚拟基站,且虚拟基站的位置可以任意指定,在RTKLIB的组件RTKNAVI中输入指定地点的坐标,即可搭建虚拟基站在电脑上通过 RTKLIB接收观测数据。在无人机航飞作业完成后,对虚拟基站接收的观测数据和无人机接收的观测数据进行PPK解算,得到航片的POS数据。
大疆精灵4 RTK无人机体积小、重量轻,便于携带,且带有RTK模块,能够获取高精度航片和观测数据。合众思壮G990 GNSS接收机内置高精度双频双星卫星接收天线,搜星与定位速度快,定位精度高,在非典型环境下抗干扰性与稳定性强。这两款设备是目前市场上中小型项目中使用较多的设备。本文使用大疆精灵4 RTK 无人机,在测区使用合众思壮G990 GNSS接收机搭建物理基站,在室内使用RTKLIB搭建虚拟基站,将无人机作为流动站,与两个基站分别进行PPK解算试验,对比两种PPK解算得到的POS数据的精度。
1 试验设计
1.1 试验设备及航线设计
为了探究在多种地物类型的场景中各设备获取数据的精度差异,本次试验选择了包含多种地物类型的区域。选择的试验区域为平原地形,地形平坦,长约350 m,宽约250 m,区域内地物种类多样,包含树林、公路、大型建筑和小面积水域,贴合实际工作场景。本次对比试验采用的设备包括大疆精灵4 RTK无人机、合众思壮G990 GNSS接收机和RTKLIB软件。精灵4 RTK无人机的参数见表1,合众思壮G990 GNSS接收机的参数见表2。
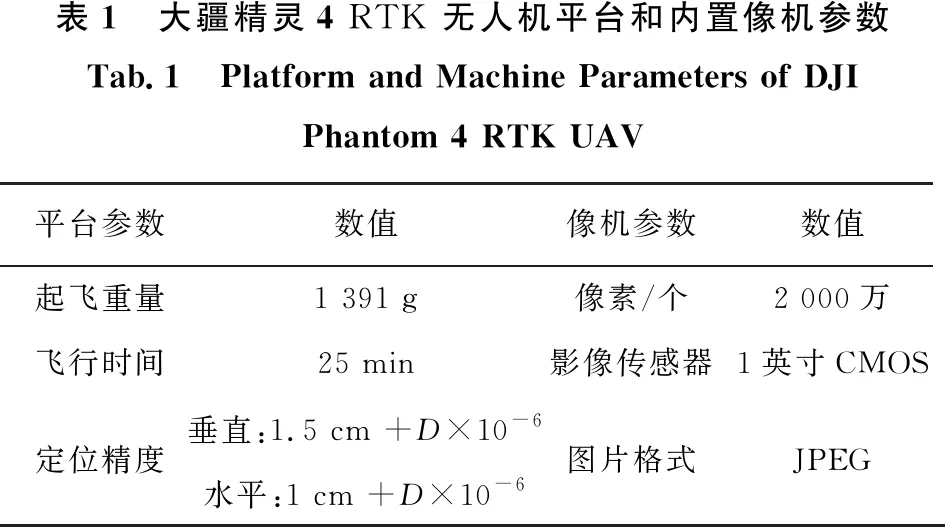
表1 大疆精灵4 RTK 无人机平台和内置像机参数Tab.1 Platform and Machine Parameters of DJI Phantom 4 RTK UAV平台参数数值像机参数数值起飞重量 1 391 g像素/个2 000万飞行时间25 min影像传感器1英寸CMOS定位精度 垂直:1.5 cm +D×10-6水平:1 cm +D×10-6图片格式JPEG

表2 合众思壮G990 GNSS接收机参数Tab.2 Parameters of UniStrong G990 GNSS Receier参数数 值操作系统Android接收信号GPS/BES/GLONASS/Galilio静态精度垂直:5.0 mm+ D×10-6;水平:2.5 mm+D×10-6RTK精度垂直:15 mm+ D×10-6;水平:5.0 mm+D×10-6
为探究不同的作业时间、航高、航向重叠率和旁向重叠率对采集数据的精度影响,进行了两个架次的飞行。其中,第一架次的作业时间为8 min,重点探究物理基站和虚拟基站在短时间内接收的观测数据的精度;为探究流动站和基站的不同距离对解算数据的影响,设计了两种航高,分别是150 m和120 m;为探究航向重叠率和旁向重叠率的差异对解算数据的影响,设计了两种航向重叠率和旁向重叠率。将这些参数添加到航线规划中,具体飞行参数见表3,航线设计见图1。

图1 无人机飞行航线

表3 飞行参数Tab.3 Parameters of Flights飞行架次测区面积/m2航测作业时间/min航高/m航向重叠率/%旁向重叠率/%第一架次75 596.581508070第二架次83 975.8171208585
1.2 试验参数设置
本次对比试验需要物理基站和虚拟基站同时接收观测数据。首先,在测区内搭建物理基站[8],设置基站坐标和接收模式等相关参数,设置完成后,开始接收观测数据。同时,在室内打开RTKLIB中的RTKNAVI,在“Options”模块的“Positions”中设置虚拟基站的坐标(见图2),在“Options”的其他菜单项设置其他相关参数。虚拟基站的坐标只需要设置为测区周围的大概位置即可。设置完成后,开始接收观测数据。然后,检查无人机各项指标参数,检查航测任务的设置,确认之后,在虚拟基站工作数分钟后,无人机升空,开始正式的航测作业。

图2 虚拟基站设置
2 POS数据处理与分析
2.1 数据解算
本次试验物理基站和虚拟基站使用的接收机的型号不同,其数据格式也不一样。物理基站接收的观测数据主要是以.dat文件格式存储在接收机中,虚拟基站接收的观测数据则是以.rtcm3格式存储在指定的文件夹中,而精灵4 RTK接收的观测数据经过转码后以.obs格式存放在项目文件夹中。
物理基站和虚拟基站接收的观测数据并不能直接和精灵4 RTK转码后的文件一起进行PPK解算,需要通过RTKCONV[8]转换成.obs文件。基站接收的观测数据经过转码后,即可在RTKPOST中进行PPK解算。
将转码后的观测数据加载到RTKPOST中,流动站(Rover)添加无人机端的数据,基站(Base Station)分别添加经过转码后的物理基站或虚拟基站的观测数据,并设置基站坐标和高度截止角等参数,如图3所示,经解算后即可得到相应的POS数据。

图3 PPK解算中的参数设置
2.2 数据分析
首先将物理基站和虚拟基站接收的观测数据分别与无人机端数据进行PPK解算,然后进行精度对比[9]。要求把处理后数据由地理坐标转换为投影坐标,再验证物理基站和虚拟基站接收的观测数据的贴合状况。
试验中进行对比的数据都已解算得到固定解。图4分别为8 min和17 min飞行时长下,无人机观测数据和物理基站/虚拟基站的观测数据经PPK解算后得到的POS数据在E、N、U方向的差异。
由图4可知,物理基站接收的观测数据和虚拟基站接收的观测数据经PPK解算后得到的POS数据的贴合程度非常高,其贴合程度达到了亚厘米级。本试验主要以均方根(RMS)指标对两次试验经PPK解算的POS数据精度进行评价,并辅以POS差值的平均值和标准差(STD)等参数。其中,均方根用于评价虚拟基站接收的观测数据与物理基站接收的观测数据的一致性。

图4 物理基站和虚拟基站PPK解算后得到的POS数据的差异
通过计算源数据得到均方根值(RMS)、标准差(STD)等数据。表4为两次飞行架次物理基站和虚拟基站观测数据经PPK解算后得到的POS数据精度对比。

表4 两次飞行架次物理基站和虚拟基站观测数据经PPK解算后POS精度对比 单位:cmTab.4 PPK Solution of Observation Data Received by Physical Base Station and Virtual Base Station 飞行架次历元数/个X(ΔX)STD(ΔX)RMS(ΔX)Y(ΔY)STD(ΔY)RMS(ΔY)H(ΔH)STD(ΔH)RMS(ΔH)第一架次2 4230.130.250.280.260.220.340.430.620.76第二架次4 986-0.120.140.191.250.201.272.550.682.64
由表4可知,物理基站和虚拟基站解算后得到的POS差值的平均值在E(X)方向分别为0.13 cm和-0.12 cm,在N(Y)方向分别为0.26 cm和1.25 cm,在U(H)方向分别为0.43 cm和2.55 cm,说明基于物理基站和基于虚拟基站获取的观测数据,经两次PPK解算后得到的POS数据之间差异较小;标准差(STD)在E(X)方向分别为0.25 cm和0.14 cm,在N(Y)方向分别为0.22 cm和0.20 cm,在U(H)方向分别为0.62 cm和0.68 cm,数值离散程度较低,两次PPK解算的POS数据差异波动较小;均方根值(RMS)在E(X)方向分别为0.28 cm和0.19 cm,在N(Y)方向分别为0.34 cm和 1.27 cm,在U(H)方向分别为0.76 cm和2.64 cm,表明物理基站和虚拟基站接收的观测数据非常贴合。
3 结 语
本文提出了一种新的无人机航空摄影测量的POS数据后处理方法,首先,使用开源软件RTKLIB在室内或者任何一个有网络的地方搭建虚拟基站,且虚拟基站的位置可以任意指定,在RTKLIB的组件RTKNAVI中输入指定地点的坐标,即可搭建虚拟基站并开始接收观测数据;其次用虚拟基站接收的观测数据和无人机接收的观测数据进行PPK后处理,得到航片的POS数据。
通过对比物理基站接收的观测数据和相同时间无人机接收的观测数据经PPK解算后得到的航片POS数据,二者吻合度非常高,平均误差在亚厘米级,满足航测作业要求。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
中国电气工程学报(2019年18期)2019-10-21
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
电子技术与软件工程(2016年24期)2017-02-23
中国高新技术企业(2015年15期)2015-05-04
卫星电视与宽带多媒体(2013年1期)2013-04-26