某型发动机高原起动失败问题分析
2022-07-13 09:04朱明勇唐平一彭文辉张光宇邹黎
中国科技纵横 2022年11期
朱明勇 唐平一 彭文辉 张光宇 邹黎
(中国航发湖南动力机械研究所,湖南株洲 412002)
航空燃气涡轮轴发动机的起动是一个非稳态的过程,它涉及工程热力学、气体动力学、传热学和控制技术在内的多门学科[1]。不同的大气条件、控制规律等均会影响发动机起动性能,如何保证发动机在使用包线范围内快速、可靠地起动是人们一直以来广泛关注的课题[2-4]。
某型发动机是轴向进气、单转子燃气发生器、环形回流燃烧室燃烧室、自由涡轮式涡轴发动机,采用全权限数字式电子控制系统(简称数控系统),以双发型式配装某直升机。在某次高原试飞过程中,在4600m高原出现起动失败现象。图1为某次高原起动历程曲线,图中ng、np、T45、nr分别表示燃气发生器转速、动力涡轮转速、燃气涡轮出口温度、旋翼转速,发动机点火、起动发电机带转正常,当ng达到75%时,np小于20%,数控系统自动控制发动机停车,起动失败。
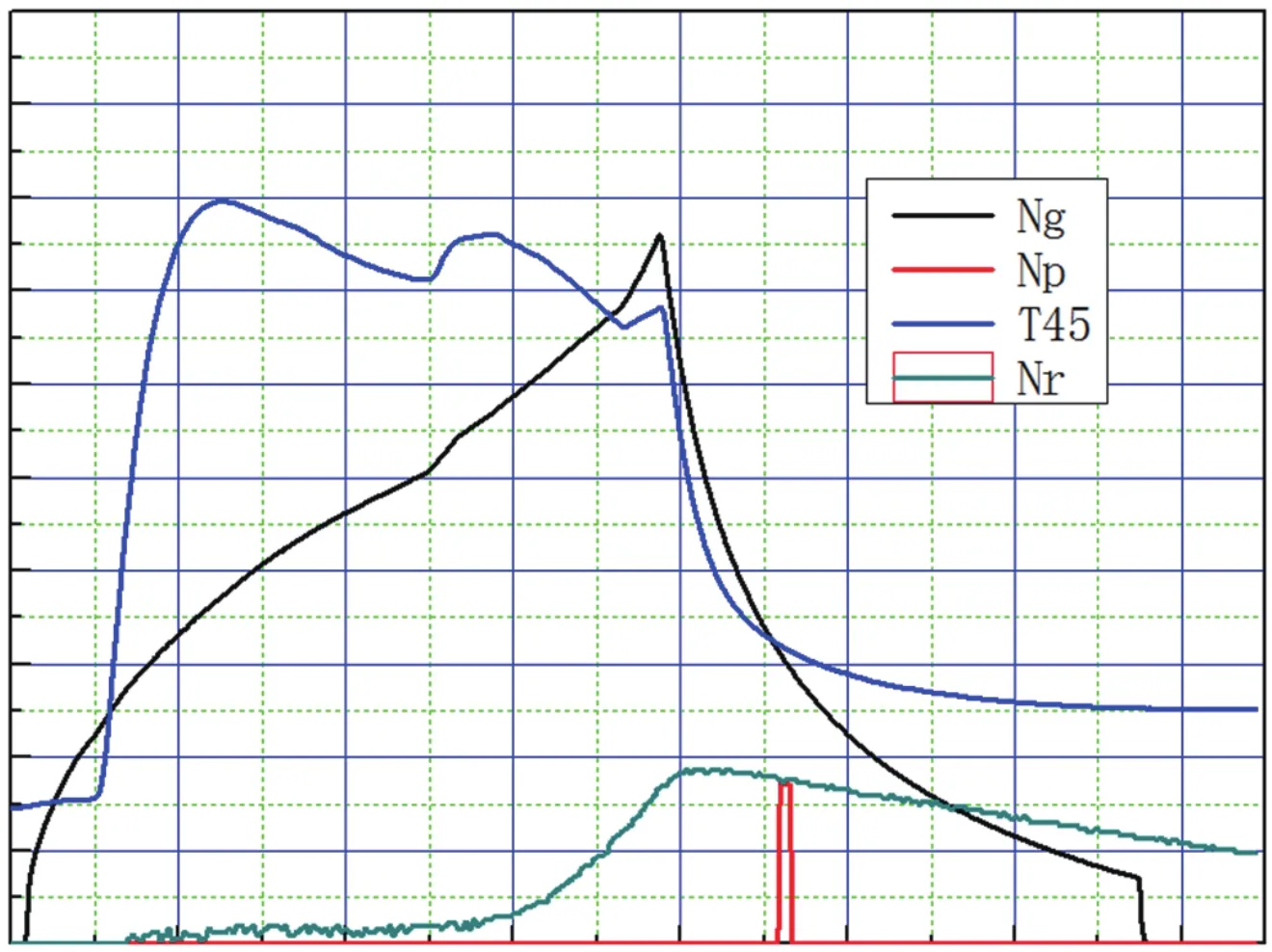
图1 某次高原起动失败历程曲线
1.起动控制规律简介
在起动控制规律的发展早期,广泛使用机械液压式的燃调系统,起动过程主要采取在给定燃油流量的基础上进行简单的修正方法,比如根据大气温度调整修正螺钉。随着数控系统的使用,使得燃油给定更为灵活,出现了给定转速率闭环计算燃油流量的方法[5-6]。某型发动机的起动控制规律包括以下3个阶段:ng转速开环阶段,ng加速度闭环阶段,慢车工作阶段。
ng转速开环阶段:达到开始供油转速后,发动机按给定的供油规律开始供油,该阶段按固定初始供油量进行供油,并根据大气条件对供油量进行修正。
ng加速度闭环阶段:根据给定的ng加速度,数控系统自动计算燃油流量需求值,发动机加速至慢车状态。
慢车工作状态:ng加速度闭环阶段结束后,数控系统根据慢车目标值,自动调节燃油流量,加速至地面慢车状态。
起动过程中,由于外界环境极度恶化或发动机本身故障可能导致起动温度偏高,或起动转速上升较慢甚至悬挂,为保障发动机的安全,需根据发动机参数变化对起动使用过程进行限制或保护,其主要的的参数限制集中在以下几个方面:
(1)燃气温度限制与保护。为了尽快起动发动机,需要保持较高的涡轮前温度,一般来说,涡轮前温度越高起动越快,但是由于材料的限制,航空发动机必须对燃气温度进行限制,否则将使损坏发动机。而由于发动机起动过程的实时性和复杂性,很容易出现起动超温现象,如果没有超温保护,燃气温度将在极短的时间内上升到发动机材料的熔点温度。
(2)转速限制。目前涡轴发动机转子动力学设计中,一般将发动机燃气涡轮转子和动力涡轮转子的稳态转速在2阶临界转速和和3阶临界转速之间,以保证较大的转速裕度。因此涡轴发动机起动过程会需要跨越1阶临界转速和和2阶临界转速,如果起动缓慢或起动悬挂,有可能导致发动机在临界转速上工作,振动增大而损坏发动机,因此需对起动时间和地面慢车转速进行合适的定义和限制,避免出现发动机转速在临界转速附近范围维持时间过长。
根据内涵与外延反变关系的简单原理,词项的内涵越简单,外延越大;反之,外延越小。结果责任不仅是侵权责任的最简构成,也决定了它的最大边界。过错责任与无过错责任均是在结果责任基础上增加构成要素或条件,二者的责任范围均要小于结果责任。所谓“侵权责任的扩张”实际上仅指侵权法自近代以来以“过错责任”为基准因应社会关系的深广发展而进行的必要延伸。但就责任的构成及其逻辑外延来说,近现代法中的侵权责任相对于结果责任仍然是限缩的状态。并且,无论侵权责任如何“扩张”,结果责任作为侵权责任的最简构成已限定了它的最大边界。
为保护发动机,防止起动过程中超温、转速悬挂等对发动机造成损伤,某型发动机主要设置了起动超温保护、燃气发生器转速悬挂保护、动力涡轮转速超时未出现保护等。触发保护条件后,数控系统自动控制发动机停车。
某型发动机使用维护手册规定:发动机起动过程中,燃气发生器转速达到75%时,动力涡轮转速仍小于20%,数控系统控制发动机停车。
2.问题原因分析
经数据分析,确认发动机高原起动失败的原因为np转速在规定时刻未达到20%,数控系统自动保护停车。发动机高原起动保护可能有以下4个方面原因:动力涡轮转子卡滞、np测量故障(包括np传感器故障和装机电缆接触不良)、旋翼负载增大、涡轮剩余功率不足。具体分析如下:
(1)动力涡轮转子卡滞。起动失败后,现场盘车检查动力涡轮转子灵活性,未见异常。分析发参数据,停车时np转速由70%降至20%的时间均为18s,停车np余转时间未见异常,因此动力涡轮转子卡滞可排除。
(2)装机电缆接触不良引起np信号故障。测试线路插头及导通性,未见异常,后续起动均成功,装机电缆接触不良引起np信号故障可排除。
(3)np传感器故障。测量2只np传感器电阻,均在正常范围,而且后续多次飞行任务,np转速及扭矩采集均正常,np传感器故障可排除。
(5)涡轮剩余功率不足。分析飞参和发参数据,发动机正常起动时,ng至66%时np为17%,此时旋翼转速nr约为17%。A架机左发起动失败过程中,电机带转能力、ng和T45上升时间均在正常范围,而ng至66%时,nr为9%,推测np约为9%(不能采集到),np转速上升偏慢。B架机右发起动失败过程中,电机带转能力、ng和T45上升时间均在正常范围,而ng至66%时,nr为10%,推测np约为10%(不能采集到),nr旋翼上升偏慢。经查发动机在4600m高原热机成功起动数据,ng至75%时,np约为22%;查发动机在3000m高度热机起动数据,ng至75%时,np约为29%。
文献[7]对气压高度对发动机起动的影响进行了研究。通过模拟计算,在3000m高度条件下,电机脱开后,涡轮有较大的剩余功率(相当于126%电机额定功率)用于带转压气机及附件。在4000m高度条件下,电机脱开后,涡轮剩余功率较小(相当于12%电机额定功率)。由于可用于加速燃气涡轮转子的剩余功率减少,因此在高空起动过程的第2阶段和第3阶段,ng上升速率随着高度的上升而减小。
综上所述,涡轮剩余功率不足不能排除。
(6)问题原因分析小结。根据以上分析,动力涡轮转子卡滞、np测量故障、旋翼负载增大可以排除,问题原因定位为涡轮剩余功率不足。
3.改进措施及验证
为解决高原起动失败问题,综合考虑外场使用需求和改进贯改周期,分别提出外场临时措施和优化改进方案。
某型发动机以双发型式配装直升机,其中后起发动机动力涡轮处于空载状态,np转速出现和上升较快,在高原试飞中未出现np超时保护停车现象。因此,提出外场临时使用措施如下:当一发起动过程np转速在规定时刻未达到20%保护停车,先起动另一发至地面慢车状态,再起动本发。通过该措施,保障了发动机的正常起动和运行及试飞任务的顺利完成。
由于高原条件下大气稀薄,发动机做功能力降低,且起动过程中燃气温度已接近限制值,通过增加起动供油量提高发动机做功能力存在较大风险。因此,选择对高原条件下发动机数控系统起动保护逻辑进行优化的改进方案,即增加高原条件下np等待时间,具体如下:
发动机起动过程中,在海拔2000m及以下高度,当燃气发生器转速首次达到或超过75%时,若动力涡轮转速小于20%,数控系统控制发动机停车。在海拔2000m以上高度,当燃气发生器转速首次达到或超过75%时以后5s时动力涡轮转速小于20%,数控系统控制发动机停车。
起动保护逻辑改进后,发动机在外场使用未出现该问题。验证结果表明,起动控制规律优化措施有效。
4.结论
针对某型涡轴发动机高原起动失败问题,通过故障分析的方法,并结合试验情况进行分析排查,得出该问题原因是动力涡轮转速上升缓慢,高原条件下涡轮剩余功率不足。主要结论如下:
(1)某型发动机高原起动失败的原因为动力涡轮转速上升缓慢,当燃气发生器转速达到75%时,动力涡轮转速仍小于20%,数控系统自动停车。
(2)由于高原空气稀薄,发动机做功能力降低,综合考虑改进风险和周期,通过优化数控系统起动保护逻辑的改进措施,解决了该类型高原起动失败问题,经验证措施有效。
(3)该问题发生在起动包线边界、部分发动机的少量热机起动过程中,在设计控制规律保护逻辑时应充分考虑发动机的分散性,保留一定的设计裕度。
(4)该问题的发生及解决思路,可为其他新研或改型涡轴发动机起动控制规律设计提供参考。
猜你喜欢
云南画报(2021年9期)2021-12-02
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年7期)2018-01-19
中国经贸聚焦(2017年12期)2017-12-20
制造技术与机床(2017年9期)2017-11-27
装备制造技术(2016年5期)2016-09-10
铁道通信信号(2016年6期)2016-06-01
航运交易公报(2014年10期)2014-04-02
航运交易公报(2014年10期)2014-04-02