一种稳健的高动态GNSS干扰抑制算法
2022-07-14 09:40张秀清范云婷王晓君
河北科技大学学报 2022年3期
张秀清 范云婷 王晓君

摘要:为了解决在高动态环境下干扰信号来向迅速变化并移出波束零陷,导致抗干扰算法性能下降的问题,提出了一种基于零陷展宽并加深的稳健波束形成算法。首先在干扰区间内设置多个虚拟干扰代替单个干扰,然后通过协方差矩阵前后向空间平滑技术对协方差矩阵进行数据修正。仿真结果表明,新算法不但可以有效加宽并加深干扰信号来向上的零陷,使得阵列有较好的输出信干噪比,而且当干扰来向快速变化时能保持较强的稳健性。在高动态环境下,当干扰快速运动时仍然具有较高的阵列输出。因此所提算法与其他算法相比具有更好的性能,并具有良好的稳健性,可为高动态环境下的强干扰抑制提供理论参考。
关键词:数据处理;高动态;GNSS信号;零陷;抗干扰
中图分类号:TN911.72文献标识码:A
DOI:10.7535/hbkd.2022yx03008
A robust GNSS interference suppression algorithm inhigh dynamic environment
ZHANG Xiuqing,FAN Yunting,WANG Xiaojun
(School of Information Science and Engineering,Hebei University of Science and Technology,Shijiazhuang,Hebei 050018,China)
Abstract:In order to solve the problem that the interference signal changes rapidly in the high dynamic environment and moves out of the null of the beam,resulting in the reduced performance of the anti-interference jamming algorithm,a robust beam forming algorithm based on null broadening and deepening was proposed.First set multiple virtual interference in the interference interval instead of a single interference,and then modified the covariance matrix by the covariance matrix forward and backward spatial smoothing technique.Simulation results show that the proposed algorithm can not only effectively widen and deepen the null in the direction of interference signal,which makes the array has a better output signal-to-noise ratio,but also maintain strong robustness when the interference changes rapidly.In the high dynamic environment,has a high array output when interference moves rapidly,the proposed algorithm has better performance and good robustness than other algorithms.It can provide a theoretical reference for strong interference suppression in the high dynamic environment.
Keywords: data processing;high dynamic;global navigation satellite system signal;null;anti-interference
全球導航卫星系统(global navigation satellite system,GNSS)因其高精度、全天候、全天时的工作特性,目前已广泛应用于诸多领域[1-3]。当GNSS接收机处于静止状态或者低速运动状态时,此类状态可以被定义为低动态,这类状态下的干扰环境可以被看作是稳定或缓慢变化的,在这种场景下的波束形成算法[4]可以较为准确地在干扰方向产生零陷。然而,当GNSS接收机处于高动态运动状态时,接收到的干扰信号的来向会发生快速变化,抗干扰算法计算出的上一时刻的权矢量无法及时匹配到下一时刻中,导致干扰移出抗干扰算法得到的零陷,导致算法的干扰抑制效果大幅下降甚至失效。
目前,研究者们从各种角度出发,研究出了不同类型的自适应算法。COMPTON提出功率倒置算法(power inversion algorithm,PI)[5],其特点是不将期望信号和干扰进行区分,直接将阵列的输出总功率降为最小,故其也被称为最小功率算法,并且不用预先了解卫星信号的先验来向信息,工程实现也相对比较简单。CAPON提出Capon波束形成算法[6],其特点是通过预先对信号方向产生增益来提高阵列的输出信干噪比[7],但是需要预先得到阵列的流型信息。这2种方法所产生的零陷比较窄,无法满足高动态条件下对所需零陷的要求。为了应对快速运动干扰有效抑制的问题,诸多学者提出了多种解决方法,其中零陷展宽[8-10]方法因其良好的抑制效果得到广泛应用。在干扰区间引入虚拟干扰源[11-12]的自适应技术,其实质是一种协方差矩阵锥化类算法[13-14],将干扰周围的零陷底部从“尖”变“平”。同时,由于加入了多个虚拟干扰,使得原信号的功率被平均分布到所有干扰位置,降低了各个干扰位置的信号功率,从而导致零陷深度变浅的问题,且该算法只适用于均匀线阵[15]。毛晓军[16]提出基于投影变换和对角加载结合的稳健零陷展宽波束形成算法(projection and diagonal loading null broadening beamforming,PDNBB)通过重设干扰,利用新干扰的导向矢量重新构建相关矩阵,再通过设定投影算子将信号子空间进行投影,最后对新的协方差矩阵进行对角加载处理[17-18]。传统对角加载的本质是在协方差矩阵对角线上加入对角加载特定值来改善噪声在子空间内的分散度,但是往往这一特征值无法准确选取,且过大或过小都会使算法的干扰抑制性能无法达到最优。张慧莎[19]提出了一种干扰来向变化规律服从Laplace分布[20]的零陷展宽算法,其本质也是一种协方差矩阵锥化类算法,利用锥化矩阵改变数据协方差矩阵的性质从而对零陷进行展宽,该算法在高动态环境下能够展宽零陷,但在零陷加宽的同时会导致零陷变浅,故当干扰快速移动时可能会移出零陷位置,从而导致算法的抗干扰能力下降。
综上,为了改善高动态环境下波束合成算法对干扰的抑制能力,提出了一种基于零陷加宽并加深的稳健算法。
1信号模型
在北斗卫星导航接收系统中,由于卫星与接收机的距离在20 000 km以上[21],故可得GNSS信号入射到接收机时的来波方向当作是不变的,相比之下干扰与接收机的距离往往比较近。当接收机载体处于快速运动状态时,接收到的干扰信号来向发生快速变化,1 ms内可达1° 甚至更大的角度偏差。
阵列接收信号后的处理过程如图1所示。首先,在每个阵元后面连接一路接收机,各阵元将接收的远场信号经射频前端进行放大滤波、模拟下变频等处理;然后,通过模数转换器对信号进行模拟信号/数字信号转换(analog to digital converter,A/D转换),将其变为数字中频信号;最后,经整理后进行加权求和,得到阵列输出。
2稳健的干扰抑制算法
3仿真实验及分析
从零陷深度宽度、抗干扰能力、稳定性以及稳健性4个方面,通过仿真对3种算法加以比较。设置阵列为8元等距线阵,阵元间距为GNSS信号半波长。为模拟GNSS信号仿真环境,选取带宽为20.46 MHz的BD-2 B3I卫星导航信号为期望信号。假设共有3个远场窄带干扰信号,分别从15°,75°,41°的方向入射,记为干扰1、干扰2、干扰3,期望信号来向为45°。对角加载因子取0.01,虚拟干扰角度区间为[-0.5,0.5],步长取0.1°。仿真实验中快拍数目为1 024,设置信噪比(signal-noise ratio,SNR)为典型值-20 dB,干噪比为40 dB。需要蒙特卡洛仿真时,采用100次仿真结果加以统计。
3.1零陷深度、宽度比较
首先将相同干扰条件下的PI算法、PDNBB算法与本文算法所生成的零陷深度和宽度加以比较,以定性说明本算法的抗干扰性能的优势。
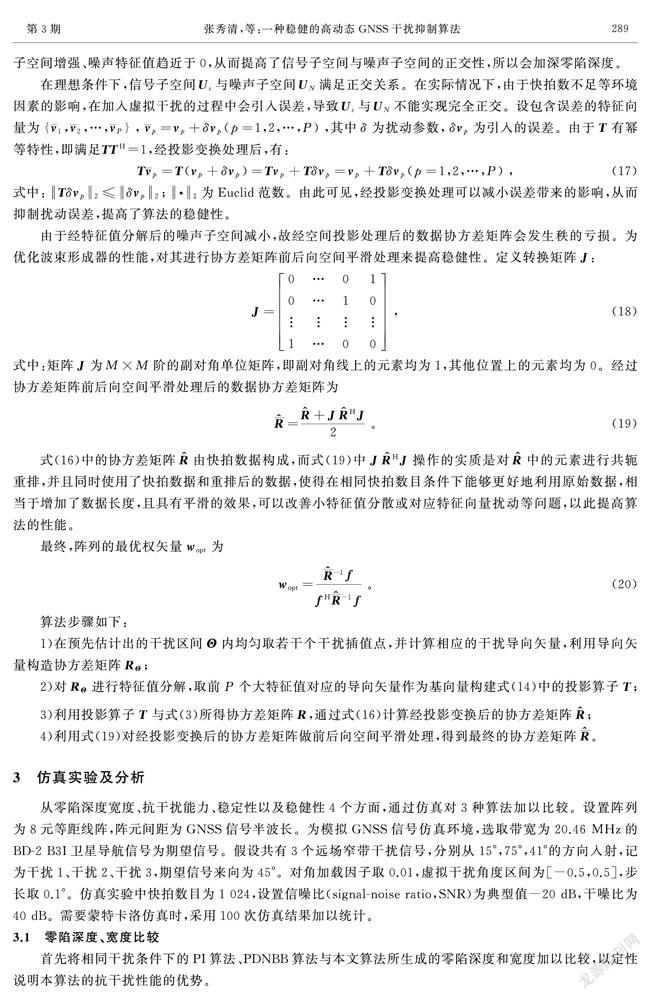
3种算法的阵列方向图如图2所示。首先,本文算法与其他算法比较生成的零陷宽度有近±0.5°的展宽。這是因为本文算法中的投影矩阵包含了干扰与虚拟干扰的入射信息,等效加宽了干扰的来向。高动态环境下,即使干扰来向变化较快,较宽的零陷均能有效将干扰抑制在零陷范围内。其次,表1给出3种算法形成的零陷深度对比,可见本文算法有约10 dB的优势。其原因是本文算法解决了协方差矩阵经特征值分解之后特征值分散的问题,并且避免了PDNBB算法中可能因对角加载因子选取不当而导致的算法性能下降的问题。综上,本文算法在干扰方向能形成较深的零陷,有效降低干扰对信号的影响,并拥有良好的展宽能力,在信号方向上能保持良好的阵列增益。
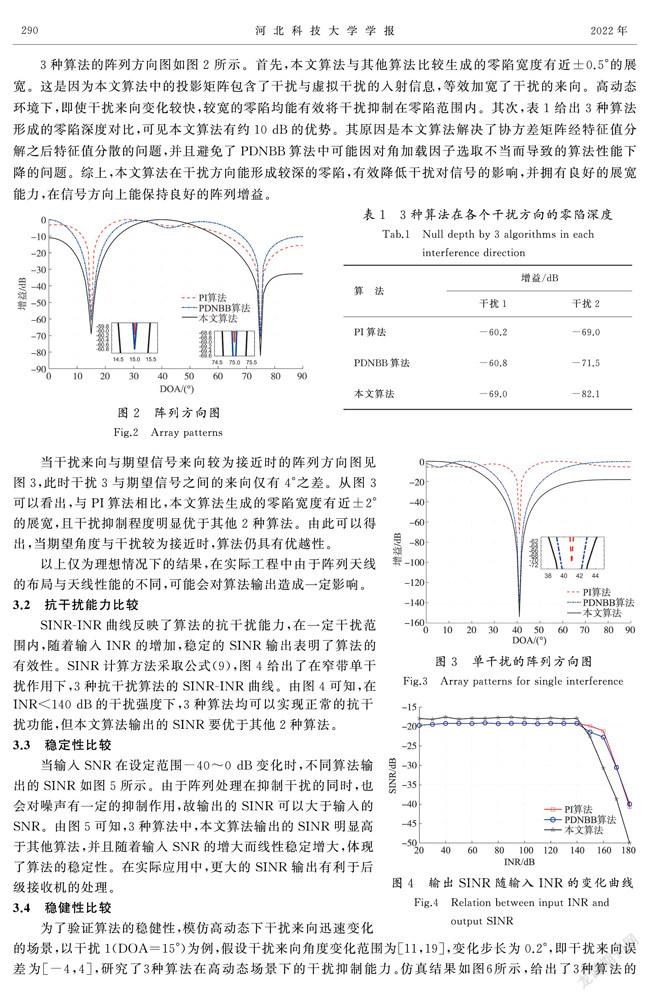
来向较为接近时的阵列方向图见图3,此时干扰3与期望信号之间的来向仅有4°之差。从图3可以看出,与PI算法相比,本文算法生成的零陷宽度有近±2°的展宽,且干扰抑制程度明显优于其他2种算法。由此可以得出,当期望角度与干扰较为接近时,算法仍具有优越性。
以上仅为理想情况下的结果,在实际工程中由于阵列天线的布局与天线性能的不同,可能会对算法输出造成一定影响。
3.2抗干扰能力比较
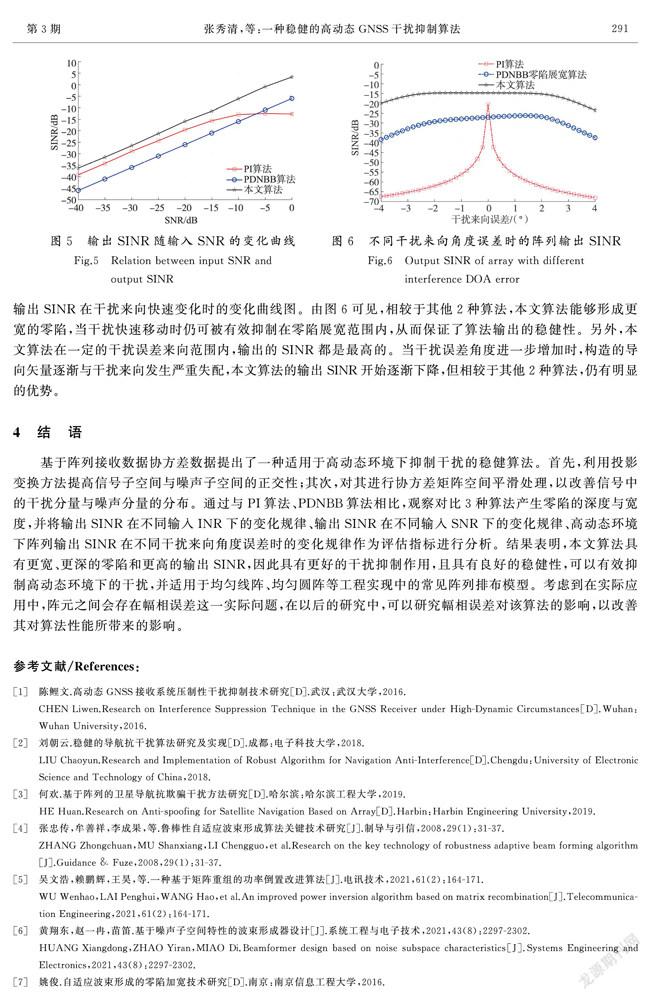
SINR-INR曲线反映了算法的抗干扰能力,在一定干扰范围内,随着输入INR的增加,稳定的SINR输出表明了算法的有效性。SINR计算方法采取公式(9),图4给出了在窄带单干扰作用下,3种抗干扰算法的SINR-INR曲线。由图4可知,在INR<140 dB的干扰强度下,
3种算法均可以实现正常的抗干扰功能,但本文算法输出的SINR要优于其他2种算法。
3.3稳定性比较
当输入SNR在设定范围-40~0 dB变化时,不同算法输出的SINR如图5所示。由于阵列处理在抑制干扰的同时,也会对噪声有一定的抑制作用,故输出的SINR可以大于输入的SNR。由图5可知,3种算法中,本文算法输出的SINR明显高于其他算法,并且随着输入SNR的增大而线性稳定增大,体现了算法的稳定性。在实际应用中,更大的SINR输出有利于后级接收机的处理。
3.4稳健性比较
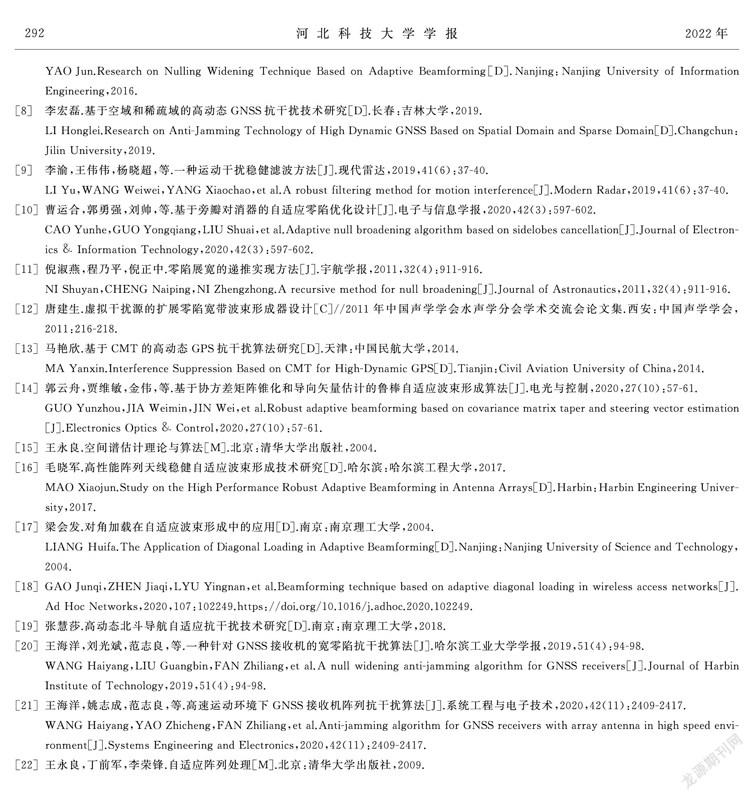
为了验证算法的稳健性,模仿高动态下干扰来向迅速变化的场景,以干扰1(DOA=15°)为例,假设干扰来向角度变化范围为[11,19],变化步长为0.2°,即干扰来向误差为[-4,4],研究了3种算法在高动态场景下的干扰抑制能力。仿真结果如图6所示,给出了3种算法的输出SINR在干扰来向快速变化时的变化曲线图。由图6可见,相较于其他2种算法,本文算法能够形成更宽的零陷,当干扰快速移动时仍可被有效抑制在零陷展宽范围内,从而保证了算法输出的稳健性。另外,本文算法在一定的干扰误差来向范围内,输出的SINR都是最高的。[JP2]当干扰误差角度进一步增加时,构造的导向矢量逐渐与干扰来向发生严重失配,本文算法的输出SINR开始逐渐下降,但相较于其他2种算法,仍有明显的优势。
4结语
基于阵列接收数据协方差数据提出了一种适用于高动态环境下抑制干扰的稳健算法。首先,利用投影变换方法提高信号子空间与噪声子空间的正交性;其次,对其进行协方差矩阵空间平滑处理,以改善信号中的干扰分量与噪声分量的分布。通过与PI算法、PDNBB算法相比,观察对比3种算法产生零陷的深度与宽度,并将输出SINR在不同输入INR下的变化规律、输出SINR在不同输入SNR下的变化规律、高动态环境下阵列输出SINR在不同干扰来向角度误差时的变化规律作为评估指标进行分析。结果表明,本文算法具有更宽、更深的零陷和更高的输出SINR,因此具有更好的干扰抑制作用,且具有良好的稳健性,可以有效抑制高动态环境下的干扰,并适用于均匀线阵、均匀圆阵等工程实现中的常见阵列排布模型。考虑到在实际应用中,阵元之间会存在幅相误差这一实际问题,在以后的研究中,可以研究幅相误差对该算法的影响,以改善其对算法性能所带来的影响。
参考文献/References:
[1]陈鲤文.高动态GNSS接收系统压制性干扰抑制技术研究[D].武汉:武汉大学,2016.CHEN Liwen.Research on Interference Suppression Technique in the GNSS Receiver under High-Dynamic Circumstances[D].Wuhan:Wuhan University,2016.
[2]刘朝云.稳健的导航抗干扰算法研究及实现[D].成都:电子科技大学,2018.LIU Chaoyun.Research and Implementation of Robust Algorithm for Navigation Anti-Interference[D].Chengdu:University of Electronic Science and Technology of China,2018.
[3]何欢.基于阵列的卫星导航抗欺骗干扰方法研究[D].哈尔滨:哈尔滨工程大学,2019.HE Huan.Research on Anti-spoofing for Satellite Navigation Based on Array[D].Harbin:Harbin Engineering University,2019.
[4]張忠传,牟善祥,李成果,等.鲁棒性自适应波束形成算法关键技术研究[J].制导与引信,2008,29(1):31-37.ZHANG Zhongchuan,MU Shanxiang,LI Chengguo,et al.Research on the key technology of robustness adaptive beam forming algorithm[J].Guidance & Fuze,2008,29(1):31-37.
[5]吴文浩,赖鹏辉,王昊,等.一种基于矩阵重组的功率倒置改进算法[J].电讯技术,2021,61(2):164-171.WU Wenhao,LAI Penghui,WANG Hao,et al.An improved power inversion algorithm based on matrix recombination[J].Telecommunication Engineering,2021,61(2):164-171.
[6]黄翔东,赵一冉,苗笛.基于噪声子空间特性的波束形成器设计[J].系统工程与电子技术,2021,43(8):2297-2302.HUANG Xiangdong,ZHAO Yiran,MIAO Di.Beamformer design based on noise subspace characteristics[J].Systems Engineering and Electronics,2021,43(8):2297-2302.
[7]姚俊.自适应波束形成的零陷加宽技术研究[D].南京:南京信息工程大学,2016.YAO Jun.Research on Nulling Widening Technique Based on Adaptive Beamforming[D].Nanjing:Nanjing University of Information Engineering,2016.
[8]李宏磊.基于空域和稀疏域的高动态GNSS抗干扰技术研究[D].长春:吉林大学,2019.LI Honglei.Research on Anti-Jamming Technology of High Dynamic GNSS Based on Spatial Domain and Sparse Domain[D].Changchun:Jilin University,2019.
[9]李渝,王伟伟,杨晓超,等.一种运动干扰稳健滤波方法[J].现代雷达,2019,41(6):37-40.LI Yu,WANG Weiwei,YANG Xiaochao,et al.A robust filtering method for motion interference[J].Modern Radar,2019,41(6):37-40.
[10]曹运合,郭勇强,刘帅,等.基于旁瓣对消器的自适应零陷优化设计[J].电子与信息学报,2020,42(3):597-602.CAO Yunhe,GUO Yongqiang,LIU Shuai,et al.Adaptive null broadening algorithm based on sidelobes cancellation[J].Journal of Electronics & Information Technology,2020,42(3):597-602.
[11]倪淑燕,程乃平,倪正中.零陷展宽的递推实现方法[J].宇航学报,2011,32(4):911-916.NI Shuyan,CHENG Naiping,NI Zhengzhong.A recursive method for null broadening[J].Journal of Astronautics,2011,32(4):911-916.
[12]唐建生.虚拟干扰源的扩展零陷宽带波束形成器设计[C]//2011年中国声学学会水声学分会学术交流会论文集.西安:中国声学学会,2011:216-218.
[13]马艳欣.基于CMT的高动态GPS抗干扰算法研究[D].天津:中国民航大学,2014.MA Yanxin.Interference Suppression Based on CMT for High-Dynamic GPS[D].Tianjin:Civil Aviation University of China,2014.
[14]郭云舟,贾维敏,金伟,等.基于协方差矩阵锥化和导向矢量估计的鲁棒自适应波束形成算法[J].电光与控制,2020,27(10):57-61.GUO Yunzhou,JIA Weimin,JIN Wei,et al.Robust adaptive beamforming based on covariance matrix taper and steering vector estimation[J].Electronics Optics & Control,2020,27(10):57-61.
[15]王永良.空间谱估计理论与算法[M].北京:清华大学出版社,2004.
[16]毛晓军.高性能阵列天线稳健自适应波束形成技术研究[D].哈尔滨:哈尔滨工程大学,2017.MAO Xiaojun.Study on the High Performance Robust Adaptive Beamforming in Antenna Arrays[D].Harbin:Harbin Engineering University,2017.
[17]梁会发.对角加载在自适应波束形成中的应用[D].南京:南京理工大学,2004.LIANG Huifa.The Application of Diagonal Loading in Adaptive Beamforming[D].Nanjing:Nanjing University of Science and Technology,2004.
[18]GAO Junqi,ZHEN Jiaqi,LYU Yingnan,et al.Beamforming technique based on adaptive diagonal loading in wireless access networks[J].Ad Hoc Networks,2020,107:102249.https://doi.org/10.1016/j.adhoc.2020.102249.
[19]張慧莎.高动态北斗导航自适应抗干扰技术研究[D].南京:南京理工大学,2018.
[20]王海洋,刘光斌,范志良,等.一种针对GNSS接收机的宽零陷抗干扰算法[J].哈尔滨工业大学学报,2019,51(4):94-98.WANG Haiyang,LIU Guangbin,FAN Zhiliang,et al.A null widening anti-jamming algorithm for GNSS receivers[J].Journal of Harbin Institute of Technology,2019,51(4):94-98.
[21]王海洋,姚志成,范志良,等.高速运动环境下GNSS接收机阵列抗干扰算法[J].系统工程与电子技术,2020,42(11):2409-2417.WANG Haiyang,YAO Zhicheng,FAN Zhiliang,et al.Anti-jamming algorithm for GNSS receivers with array antenna in high speed environment[J].Systems Engineering and Electronics,2020,42(11):2409-2417.
[22]王永良,丁前军,李荣锋.自适应阵列处理[M].北京:清华大学出版社,2009.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
计算技术与自动化(2022年1期)2022-04-15
心理学报(2022年4期)2022-04-12
科技创新导报(2021年33期)2021-04-17
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子技术与软件工程(2016年24期)2017-02-23
科技视界(2016年18期)2016-11-03
经营者(2016年12期)2016-10-21
科技视界(2015年25期)2015-09-01