采煤机记忆截割自动化控制工作原理
2022-07-14 10:04陈梁昊
机械管理开发 2022年6期
陈梁昊
(山西焦煤西山煤电西铭矿, 山西 太原 030052)
引言
目前,我国使用的采煤机很多都具有记忆截割功能,但是由于工作面地质条件不稳定、夹矸石量大,仍然不能完全适合实际应用,另一方面,由于和液压支架电压控制系统和刮板输送机联动方面可能存在各种配合上的问题,很多煤矿的技术水平达不到记忆截割的应用条件[1-3]。因此,对记忆截割技术的理论和实践研究仍然具有一定的挑战性。
1 “三机”配合原理
如图1 所示为典型的综采工作面设备布置俯视图,主要设备为滚筒采煤机、刮板输送机和液压支架,图中“A-A”截面的侧视图展示了这三种设备的空间关系。采煤机的左右行走轮骑在刮板输送机的销排上,处于相互啮合状态,液压支架布置于采空区一侧。这三种设备相互配合、协同工作,共同完成自动化采煤流程,俗称“三机配套”。在采煤机工作过程中,包含三个方向的运动,分别是沿刮板输送机方向往复的牵引运动、向煤壁方向的推溜运动和滚筒上下的调高运动。采煤机在刮板输送机上行走时的同时,滚筒不断向前切割,前后滚筒分别将顶煤和底煤从煤壁上截割下来,掉落的煤块通过螺旋叶片输送到刮板输送机上,刮板输送机再将煤块输送至转载机,转载机一般带有破碎机,进一步将煤块破碎后,由刮板输送机转运至顺槽的可伸缩带式输送机,由此将煤块运输至井上。在一个截割周期内,由于煤层的厚度是变化的,因此采煤机司机需不断调整滚筒高度,以尽量使滚筒切割边缘贴近煤层顶部。切割完一个周期后,液压支架将刮板输送机推向煤壁方向,然后液压支架跟进,完成推溜动作,准备开始下一刀截割。在综采工作面中,由于煤层厚度的变化是缓慢的,因此在每个截割周期内,对于同样的采煤机的位置,滚筒的适合高度总是相差不大的,因此可以通过采煤机位置、倾角等信息,确定滚筒截割下一刀的路径。只需要经验丰富的采煤机司机进行一次人工示范操作,后面的操作可根据第一刀的截割路径自动进行。
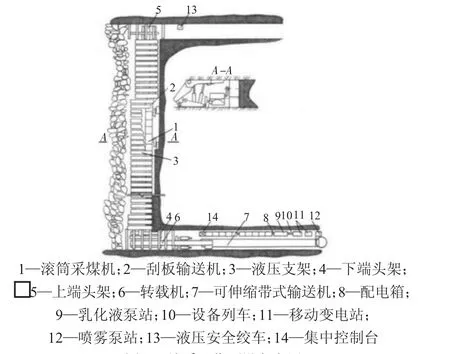
图1 综采工作面设备布置
2 记忆截割工作原理
在司机操作采煤机进行第一刀“示范刀”截割时,工作面的各类型传感器实时采集采煤机位置和姿态数据并将其存储在计算机中,这些信息包括牵引方向和速度、滚筒位置、工作面长度、横纵倾角。在自动截割模式下,计算机通过历史数据确定下一个截割周期的滚筒高度,以此实现路径记忆。以工作面方向为X轴正方向,采煤机推进方向为Y 轴正方向,滚筒向上调整方向为Z 轴正方向,建立空间直角坐标系。在进行第一刀截割时,在X 轴上均匀设置N 个采样点,将其对应的采煤机位姿信息和当时每个点的滚筒高度记录下来作为示范截割路径,记为{A1,A2,…,AN},第二次截割时,可结合采煤机的实时位姿信息和前一次截割的截割路径,重复第一次的的截割路径{B1,B2,…,BN},以此作为循环进行采煤作业。在循环过程中,如果采煤机司机发现滚筒高度调整不合适,可以手动进行调整,调整后的路径会被作为新的截割路径被记忆下来。需要注意的是,由于控制精度问题,记忆截割的循环次数不宜过多,一般以4~5 个循环为宜。循环结束后需要再次将采煤机设置为手动操作模式,重新进行基准参数的设置,然后进行“示范刀”截割。
3 记忆截割系统架构
记忆截割系统的总体架构如图2 所示,主要由传感模块、机载控制器、顺槽控制器、执行机构以及他们之间的拘束传输网络组成。机载传感器包括牵引速度轴编码器、机身倾角传感器、左右摇臂倾角传感器、左右截割电机温度传感器、左右牵引电机温度传感器、左右截割电机电流传感器、左右牵引电机电流传感器,其作用是采集采煤机的状态信息。这些传感器采集到相应的数据后,发送给机载控制器。机载控制器为PLC 控制器,其输入模块接收到机载传感器发送的数据后,可以对这些数据进行处理,并通过以太网通讯模块发送给远程的顺槽控制器。机载控制器可以进行模式选择、状态监测、异常处理,并通过输出模块发出控制指令,以控制左右摇臂的上升或下降,电磁阀、采煤机自动电磁阀、牵引电机控制器接收到这些控制指令后,做出相应的调高或调速动作,完成自动截割。顺槽控制器可以将所有监控数据上传至采煤机监控平台和无线MESH 交换机网络管理平台,实现远程操控和网络管理。
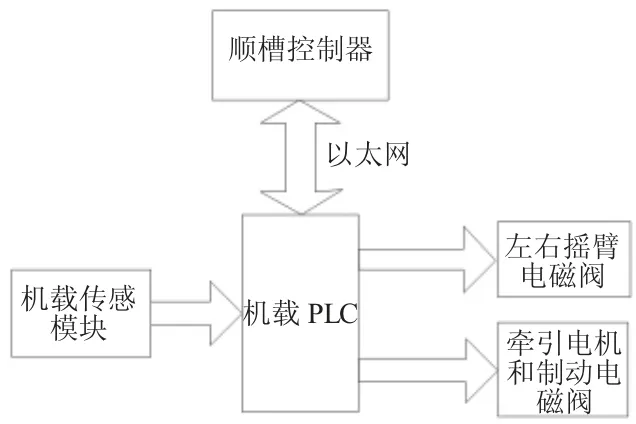
图2 记忆截割系统的总体架构
4 记忆截割控制流程
采煤机记忆截割控制流程如图3 所示,采煤机开始采煤作业后,选择采煤机的工作模式,记忆截割系统具有三种工作模式可供选择:手动操作模式、自动运行模式、示范模式。选择手动操作模式时,采煤机作业全程由司机控制,采煤机的牵引速度和滚筒高度均由司机操作经验决定。选择自动运行模式后,需要进行示范模式判断,在示范模式下,采集采煤机的位置和姿态数据,并对此数据形成路径记忆。如果选择自动运行模式,则直接载入上次记忆的路径,并对此路径进行跟踪。在跟踪路径过程中传感器仍然实时采集数据,如果判断发生了煤层厚度变化,还能根据自适应算法进行自动调节,重新形成记忆路径。形成新的路径后判断采煤机状态是否正常,如果正常则机载控制器向左右摇臂以及牵引电机等执行机构发出控制指令,如果采煤机状态异常,则需要司机进行人工干预,形成新的路径。

图3 采煤机记忆截割控制流程
5 结语
记忆截割是一种智能化程度很高的综采工作面自动化技术,通过采集采煤机的位置和姿态信息,参照示范刀的截割路径,可以使采煤在没有人工干预的情况下完成数个截割周期,实现采煤效率最大化,减轻采煤机司机的劳动强度。智能传感技术、无线网络通信技术、截割路径优化技术将是记忆截割技术未来的发展和研究方向。
猜你喜欢
山东煤炭科技(2022年8期)2022-09-14
煤炭工程(2022年8期)2022-08-24
防爆电机(2022年1期)2022-02-16
建材发展导向(2021年6期)2021-06-09
河北画报(2021年2期)2021-05-25
矿山机械(2021年3期)2021-03-25
煤矿机电(2019年6期)2020-01-13
电子技术与软件工程(2019年15期)2019-12-03
建材发展导向(2019年11期)2019-08-24
山东工业技术(2016年15期)2016-12-01