基于激光雷达的船舶边界探测技术研究
2022-07-21 03:40富玲峰廖正勇吴富民
无线互联科技 2022年9期
富玲峰,廖正勇,吴富民
(1.中电科(宁波)海洋电子研究院有限公司,浙江 宁波 315040;2.嘉关市港航管理服务中心,浙江 嘉关 314001)
0 引言
随着全球经济一体化的不断深入,航运产业迅猛发展,船舶数据急剧增加。 在海上交通环境日益复杂的情况下,船舶自身周围情况的探测难度越来越大。雷达作为船舶的主要助航仪器,从出现至今一直发挥着重要作用。 目前航海雷达的探测距离可达10~20 mile,精度达到30 m 左右。 同时雷达也有很多缺点:相同频率的雷达在距离较近时会产生同频干扰杂波;雷达存在30~50 m 的固定盲区;雷达的方位角精度差;一般方位角误差在1°左右,且随量程变化而变化。 船用AIS 自动识别系统是继雷达之后最重要的避碰助航设备,该系统无须人工维护和参与,能够自动发射和接收船舶识别和航行相关信息,通信可靠性高,不受气象海况影响,不会因杂波干扰而丢失小目标。 AIS 作用距离在15~30 mile,精度稳定在10~30 m。 但AIS 也存在一些局限性:如一些大的障碍会使AIS 行程信号盲区,在航行实践中也会产生目标丢失等现象;并非所有船舶都安装AIS 设备,这就使得一些未安装AIS 设备的小船无法被探测到。 在上述的传统技术下,船舶很难探测到自身周围近距离的未安装AIS 设备的小船或浮标之类的障碍物;或在夜晚视线不好情况下,船舶的停泊或拖轮的助泊作业时,无法精确地测量出船舶周围障碍物的距离和方位角。 因此有必要在船舶航行中提供一种精确的边界探测技术,在船舶即将发生碰撞的时候及时发出声光预警,避免发生不必要的碰撞[1]。
1 边界探测系统设计
本主机系统采用千兆以太网总线架构,利用3 个激光雷达(左舷、右舷、顶部)探测船舶周边障碍物,通过点云数据分析处理平台对3 个激光雷达发送的网络数据包进行分析处理后,计算出每个激光雷达的边界距离最小的扫描点距离船舶中心位置点的距离、方位角、高度、边界距离和接近速度的信息,在船舶的显示预警终端的屏幕上显示这些信息。 同时判断边界距离是否小于报警门限值,如果边界距离小于报警门限值,则显示预警终端将屏幕上显示的信息设成红色,同时通过喇叭发出语音报警。 边界探测系统架构,如图1所示。
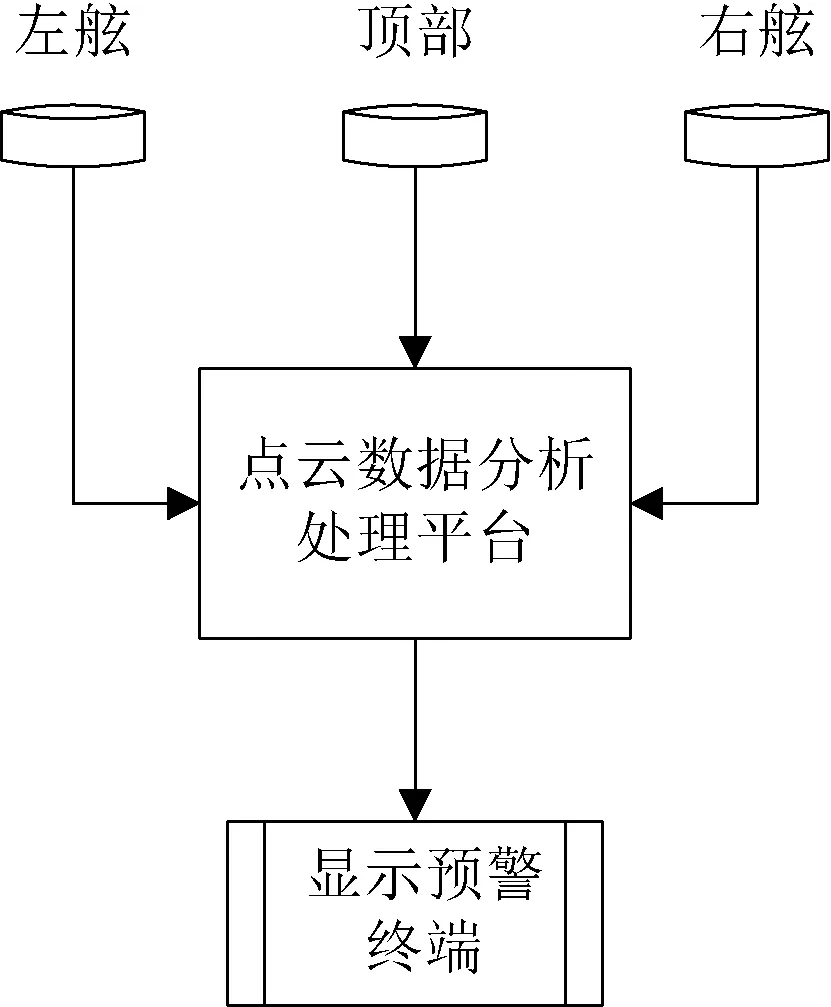
图1 边界探测系统架构
2 船舶边界探测技术
2.1 点云数据分析处理
激光雷达点云数据是以UDP 数据包的形式发送的,每个网络数据包为1 248 字节的报文,每个网络数据包包括一个42 字节的帧头、1 200 字节的12 个数据块、4 字节的一个时间戳和2 字节的一个工厂序号;每个数据块包括一个2 字节的标志位、一个2 字节的方位角和96 字节的32 个通道数据,每个通道数据包括一个2 字节的距离值和一个1 字节的反射强度值[2-5]。激光雷达点云数据,如图2 所示。

图2 激光雷达点云数据
以每个激光雷达的横轴和纵轴的交点为雷达中心位置点,分别以3 个激光雷达的雷达中心位置点为中心,建立3 个三维笛卡尔坐标系,其中,X 轴为水平横向,左为负,右为正;Y 轴为水平纵向,前为正,后为负;Z 轴为垂直方向,上为正,下为负;每个激光雷达对应的三维笛卡尔坐标系的建立过程为:假设每个通道数据的方位角为α,垂直角为ω,距离值为R,该通道数据的扫描点数据Xi,Yi,Zi的计算方法如下:
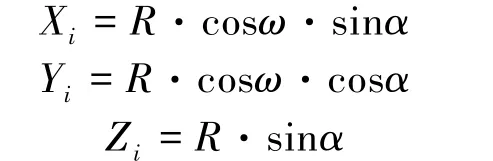
其中,i=1 表示左舷激光雷达,i=2 表示右舷激光雷达,i=3 表示罗经甲板激光雷达;激光雷达坐标系,如图3 所示。
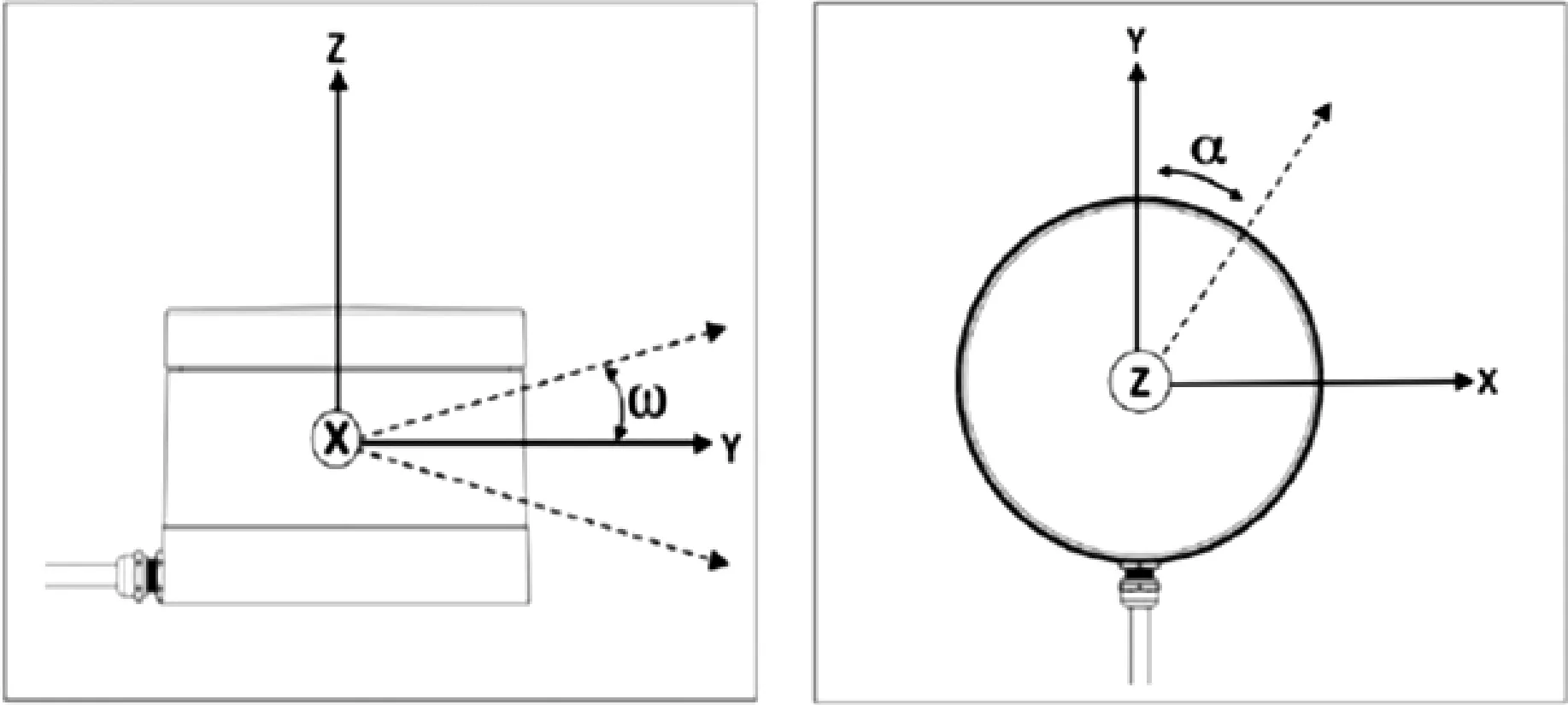
图3 激光雷达坐标系
每个激光雷达的所有扫描点数据组成的360°全景扫描数据即为该激光雷达的扫描数据。
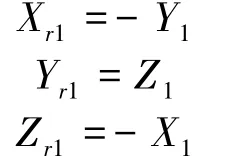
将3 个激光雷达的扫描数据进行旋转变换,其中左舷激光雷达的扫描数据进行顺时针90°的旋转变换,得到旋转变换数据Xr1,Yr1,Zr1,计算式为:
右舷激光雷达的扫描数据进行逆时针90°的旋转变换,得到旋转变换数据Xr2,Yr2,Zr2,计算式为:

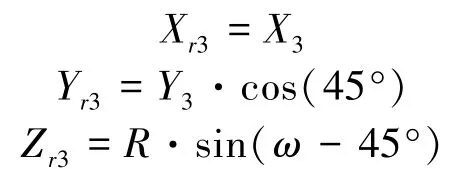
罗经甲板激光雷达的扫描数据进行水平向下45°的旋转变换,得到旋转变换数据Xr3,Yr3,Zr3,计算式为:
分别根据3 个激光雷达的安装位置点对得到的旋转变换数据进行平移变换,得到3 个激光雷达的安装位置点相对船舶中心位置点的平移数据;以船舶中心位置点为原点,建立船舶的三维笛卡尔坐标系。
假设每个激光雷达的安装位置点为Xfi,Yfi,Zfi,经过平移变换后得到平移数据Xmi,Ymi,Zmi,计算式为:
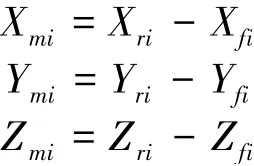
其中,i=1 表示左舷激光雷达,i=2 表示右舷激光雷达,i=3 表示罗经甲板激光雷达。
2.2 边界距离计算及预警
根据船舶的尺寸信息,分别对3 个激光雷达的平移数据进行边界计算,得到船舶边界数据,所述的船舶边界数据包括每个通道数据的扫描点距离船舶中心位置点的距离dci、方位角ϕci、高度Hci和边界距离Di,将船舶的长度、宽度和高度分别记为L,W和H,假设船头近似为半椭圆,将船头的长半径记为Rl。dci,ϕci,Hci,Di的计算式为:
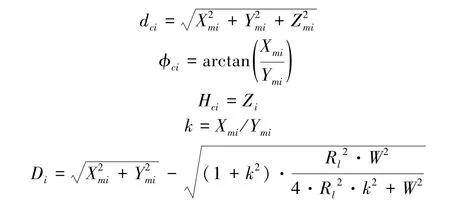
其中,i=1 表示左舷激光雷达,i=2 表示右舷激光雷达,i=3 表示罗经甲板激光雷达。
记录每个激光雷达的边界距离最小的扫描点,假设t1时刻该扫描点距离船舶中心位置点的距离为dt1,t2时刻该扫描点距离船舶中心位置点的距离为dt2,则该扫描点所在的船舶周边障碍物接近船舶的接近速度vi为:
显示预警终端接收到包含每个激光雷达的边界距离最小的扫描点距离船舶中心位置点的距离、方位角、高度、边界距离和接近速度的信息后,以俯视和后视的视角在船舶的驾驶台的屏幕上显示这些信息,同时判断边界距离是否小于报警门限值,如果边界距离小于报警门限值,则船载终端将屏幕上显示的信息设成红色,同时通过喇叭发出语音报警[6]。
2.3 智能语音预警技术
本系统将船舶安全距离划分为4 个等级,分别为50 m 绿色显示区、25 m 黄色预警区、10 m 橙色警报区、3 m 红色警报区,同时采用人工智能语音技术,根据不同情况,对航行驾驶发出不同级别的语音预警。 当系统探测的物体出现在船舶50 m 范围内时,显示预警终端会以绿色的图标在界面上进行显示,不会语音提醒。当系统探测的物体出现在船舶25 m 范围内时,显示预警终端会以黄色的图标在界面上进行显示,同时发出智能语音提醒,提醒内容包括被探测物体距离、方位和速度。 当系统探测的物体出现在船舶10 m 范围内时,显示预警终端会以橙色的图标在界面上进行闪烁显示,同时发出智能语音预警。 当系统探测的物体出现在船舶3 m 范围内时,显示预警终端会以红色的图标在界面上进行闪烁显示,同时发出智能语音紧急警告[7]。 船舶边界探测显示界面,如图4 所示。
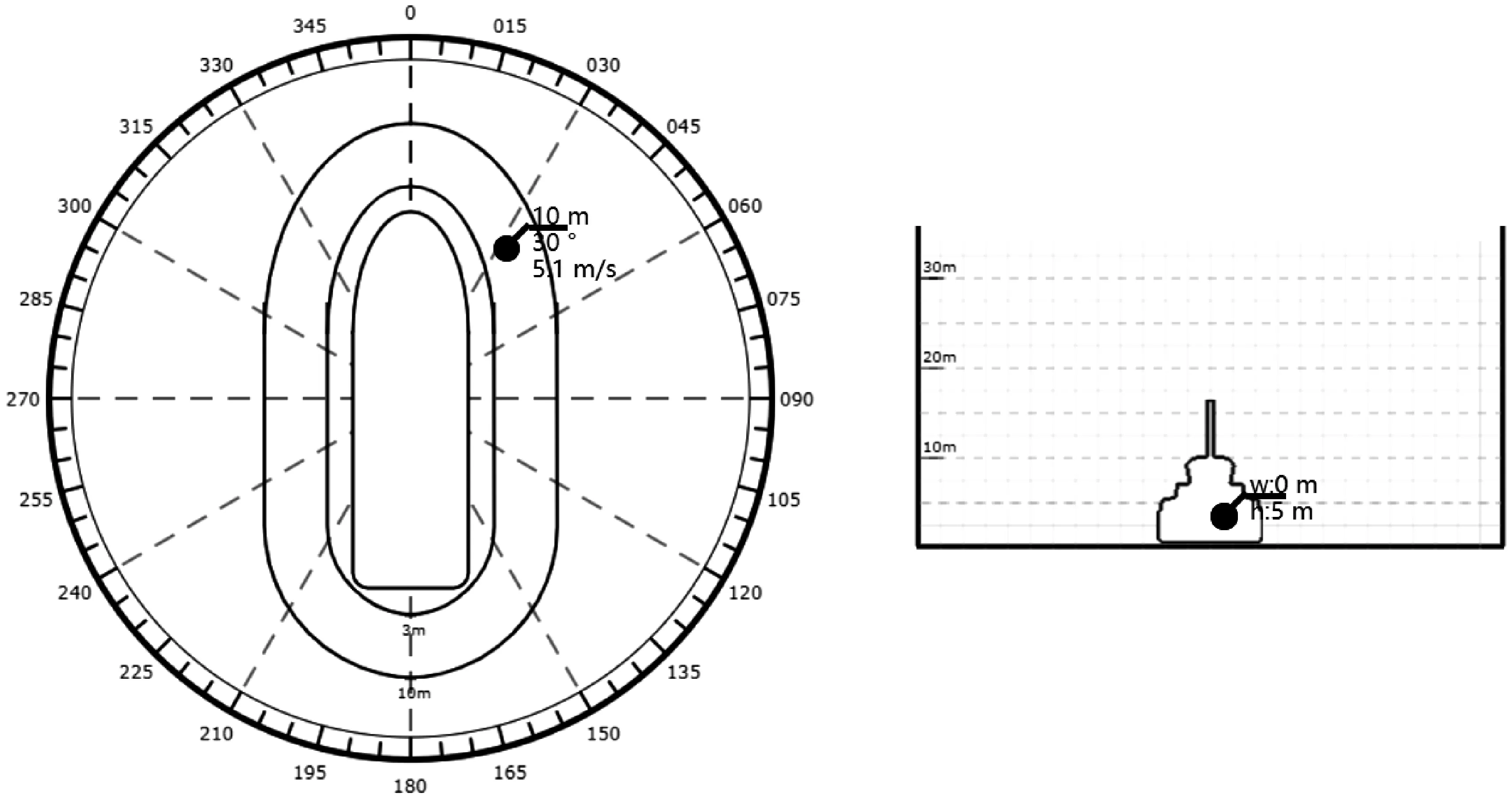
图4 船舶边界探测显示界面
3 结语
本文提供一种基于激光雷达的船舶边界探测技术,该探测方法能够有效克服上述不利因素,精确探测船舶周围近距离障碍物并及时预警,降低发生碰撞的风险,提高船舶航行的安全性。 目前该技术成功应用于天津港轮驳公司的4 艘轮船和宁波港轮驳公司的一艘轮船上,并且使用效果良好,获得甲方公司的一致好评。
猜你喜欢
北京测绘(2022年5期)2022-11-22
销售与市场(营销版)(2021年10期)2021-11-21
汽车观察(2021年8期)2021-09-01
空间科学学报(2020年4期)2020-04-22
销售与市场(营销版)(2019年6期)2019-06-21
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
网络安全技术与应用(2017年9期)2017-09-20
河南科技(2015年18期)2015-11-25
城市勘测(2013年5期)2013-03-06