导引头抗有源投掷式诱饵干扰半实物仿真
2022-07-22 05:38宋卫东李建华李云鑫
制导与引信 2022年2期
宋卫东,马 宁,李建华,李 康,李云鑫
(1.上海无线电设备研究所,上海 201109;2.上海航天精密机械研究所,上海 201699)
0 引言
现代作战中,飞机在被敌方雷达跟踪时及时投放出一个或多个有源雷达诱饵,只要保证诱饵特性满足敌方雷达跟踪的要求,敌方雷达就有可能放弃跟踪真正的飞机目标,转而跟踪诱饵。这类诱饵被称为有源投掷式诱饵。为了对抗有源投掷式诱饵干扰,在防空导弹雷达导引头设计研制过程中,需要进行抗有源投掷式诱饵干扰半实物仿真,验证导引头抗干扰性能。
王明等研究了转发式投掷式雷达干扰机工作原理,葛悦涛等研究了小型空射诱饵弹(miniature air-launched decoy,MALD)的技术指标及4种作战样式,徐刚等研究了MALD 的发展过程和使用情况,尹航等介绍了多种国外MALD 和5种作战模式,张兴利等研究了雷达型导弹抗拖曳式诱饵干扰半实物仿真试验技术,赵超等研究了反舰导弹雷达导引头干扰对抗性能分析评估的数学仿真平台设计方法,韦宇祥等研究了静态导引头抗干扰半实物仿真试验方法。上述文献分别研究了空射及拖曳式诱饵干扰技术和导引头半实物仿真技术,但是在导引头抗投掷式诱饵干扰半实物仿真方面没有涉及,本文主要展开相关技术研究。
1 导引头抗干扰半实物仿真试验系统
利用导引头半实物仿真试验系统完成导引头抗投掷式诱饵干扰半实物仿真。导引头半实物仿真试验系统主要由仿真总控子系统、阵列馈电子系统及馈电控制设备、目标/干扰模拟源、转台及控制设备、导引头测试设备等组成。导引头半实物仿真试验系统如图1所示。
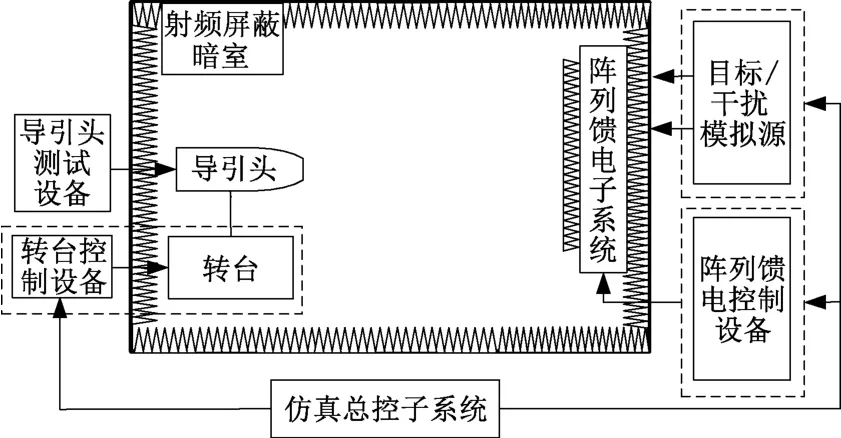
图1 导引头半实物仿真系统构成图
目标/干扰模拟源接收到仿真总控子系统给出的目标回波及干扰信号的样式、功率、频率和延时等参数,生成相应的目标回波和干扰信号,然后将信号传送到阵列馈电子系统。阵列馈电子系统接收到仿真总控子系统给出的偏航角和俯仰角控制指令后,使线馈进来的目标回波和干扰信号在相应的角度输出。转台接收到仿真总控子系统给出的偏航角、俯仰角、滚转角的控制指令后,带动导引头转动到指定位置。在一般的半实物仿真中,为便于设计仿真和处理结果数据,可使转台保持零位,仅通过阵列馈电子系统模拟目标和干扰的角度变化。
导引头测试设备给导引头上电,并向导引头发送预装参数和控制指令,导引头接收目标回波和干扰信号,通过信号处理,得到探测结果,并输出至导引头测试设备,供试验人员分析和保存。
2 导引头抗干扰半实物仿真输入参数计算
为了开展导引头抗干扰半实物仿真试验,需要在半实物仿真试验前,通过数字仿真计算出半实物仿真的输入参数。
在真实的作战场景中,导弹、目标和干扰相对运动,随着目标和干扰相对导引头角度的持续变化,目标回波和干扰信号的功率、频率等参数也持续变化。在防空导弹导引头抗干扰半实物仿真过程中,需要将目标和干扰的变化过程通过半实物仿真系统模拟出来,因此需要计算目标和干扰的位置及信号参数作为半实物仿真系统的输入,模拟干扰释放过程中导引头面临的动态变化的电磁环境。
首先需要设计干扰场景,干扰场景确定了仿真的基本信息。根据雷达导引头体制的不同,可分为半主动雷达导引头、主动雷达导引头、被动雷达导引头抗干扰场景;根据作战环境不同,可分为地面、海面、空中场景;根据导弹飞行高度不同,可分为高空、中空、低空场景;根据弹目交会过程不同,可分为迎头攻击、尾追攻击场景。干扰场景设计时应当确定导引头体制、导引头参数、作战环境、弹目飞行数据、弹目交会方式、目标参数、干扰样式、干扰释放过程、干扰信号参数等干扰场景参数,明确试验目的。
确定干扰场景后,设计数字仿真程序计算半实物仿真系统的输入参数,并将弹道数据作为数字仿真输入。弹道数据是指通过仿真或者外场试验得到的导弹和目标在每一时刻的坐标。设导引头坐标为((),(),()),目标坐标为((),(),())。根据干扰场景确定干扰释放时机、位置及干扰后续运动特征,结合弹道数据中目标运动轨迹,通过数字仿真,计算得到干扰在每一时刻的坐标((),(),())。根据目标与导引头每一时刻的坐标,可以计算出目标相对导引头的距离。同理,可得干扰相对导引头的距离。
目标相对导引头的偏航角()和俯仰角()计算式为
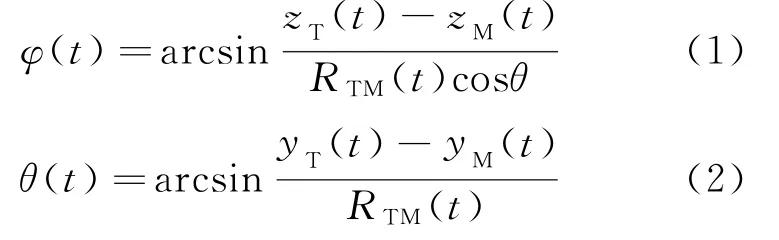
根据式(1)和式(2)可计算出目标相对导引头每一时刻的俯仰角和偏航角。同理,可计算干扰相对导引头的俯仰角和偏航角。对目标和干扰的俯仰角及偏航角进行数据转换,可得到半实物仿真系统阵列馈电子系统的输入参数。
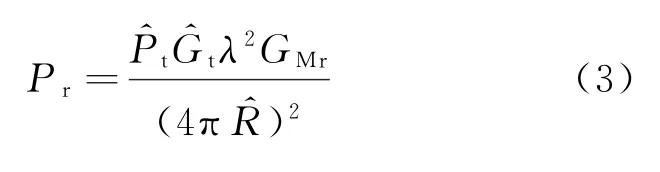
根据雷达方程,半实物仿真中导引头接收到的阵列天线发射的功率

对半主动雷达导引头,设定地面照射雷达的发射功率和发射天线增益,以及导引头接收天线的增益和目标的雷达散射截面积(RCS),根据雷达方程可得到半主动雷达导引头接收到的目标回波功率

式中:为地面雷达发射功率;为地面雷达发射天线增益;为目标的雷达散射截面积;为目标与地面雷达之间的距离。
半实物仿真中用阵列天线模拟目标,根据式(3)和式(4),有

化简式(5),得到模拟半主动制导模式下目标回波时的阵列馈电天线发射功率
对主动雷达导引头,设定导引头发射功率、天线增益、目标RCS,根据雷达方程可得到主动雷达导引头接收到的目标回波功率

半实物仿真中用阵列天线模拟目标,根据式(5)和式(7),有

化简式(8),得到模拟主动制导模式下目标回波时的阵列馈电天线发射功率
针对干扰,设定干扰机发射功率、发射天线增益,再结合导引头接收增益,可计算出导引头接收到的干扰信号功率

式中:为干扰机的发射功率;为干扰机的发射天线增益;为干扰机与导引头之间的距离。
半实物仿真中用阵列天线模拟干扰机,根据式(3)和式(10),有

化简式(11),得到模拟干扰信号时的阵列馈电天线发射功率
根据目标与导引头每一时刻的坐标,可以计算出目标相对导引头的径向速度,根据多普勒频率计算公式

可计算目标相对导引头的多普勒频率。同理,可计算干扰相对导引头的多普勒频率。
对主动雷达导引头,已知目标与导引头之间的距离,根据距离与延时的关系,可以计算目标回波信号到达导引头的延时

式中:为电磁波传播速度。同理,可计算干扰信号到达导引头的延时。
对目标回波信号和干扰信号的功率、频率、延时等信息进行数据转换,可得到目标/干扰模拟源的输入参数。
3 导引头抗投掷式诱饵干扰半实物仿真输入参数设计
3.1 场景设计
投掷式诱饵干扰的干扰场景设计需确定投掷式诱饵干扰的运动模型。载机自卫是投掷式诱饵干扰的常用场景,主要用于载机已被对方雷达跟踪的场景。载机投掷出有源雷达诱饵干扰,对方雷达转而跟踪诱饵,载机摆脱雷达跟踪。为了确保诱饵刚刚投掷出去时,和目标同在雷达速度跟踪波门内,诱骗雷达跟踪诱饵,使雷达速度波门跟着诱饵速度变化,一般是向前或向侧前方投掷。诱饵的初始速度与载机速度一致,有的诱饵会装置火箭助推器,用以保持诱饵速度,有的诱饵则做无助推的抛物运动。
有源投掷式诱饵发射的干扰信号,通常是由载机或诱饵接收到的敌方雷达发射信号经过调制,生成的假目标信号。该信号由干扰发射机释放,且保证干扰信号到达导引头接收机的功率大于目标回波信号到达导引头接收机的功率。
假设干扰场景为单个有源投掷式诱饵干扰。诱饵干扰投放方向与载机飞行方向一致,投放后没有助推,初始速度与载机速度一致,仅考虑气动力和重力做抛物运动,载机和导弹呈迎头拦截状态。
3.2 位置参数计算
以某一典型弹道参数作为数字仿真输入,计算半实物仿真位置参数。首先通过仿真给出导弹、目标和干扰的位置量,这些量与导引头探测体制无关,是导弹相对目标和干扰的物理位置的量,包括目标相对导弹的距离、角度,干扰相对导弹的距离、角度。
在典型弹道中,导弹从地面发射,先高抛,然后下扎,导弹与目标呈迎头拦截状态,目标沿方向做水平运动。设仿真时间为,目标载机在时刻向前施放投掷式诱饵干扰。干扰初始位置即为目标在时刻的位置,干扰初速度方向与目标运动方向一致,即方向。设目标速度在三个方向上的分量分别为,,,干扰速度在三个方向上的分量分别为,,,干扰加速度在三个方向上的分量分别为,,。 干扰在方向受运动方向的空气阻力,方向空气阻力可以忽略,在方向受重力和气动浮力合力。则干扰在三个方向上的速度为
在干扰的初始位置基础上,加上三个方向上干扰的速度分量对时间的积分,即可得到干扰在每一时刻的坐标。通过仿真得到导弹、目标及干扰的运动轨迹如图2所示。
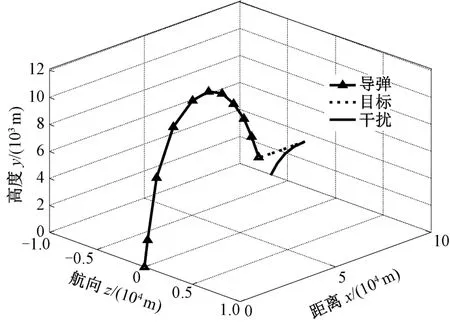
图2 导弹、目标及干扰的运动轨迹
根据导弹、目标和干扰的实时坐标,通过数字仿真,可得到目标及干扰相对导弹在每一时刻的俯仰角和偏航角,分别如图3和图4所示。
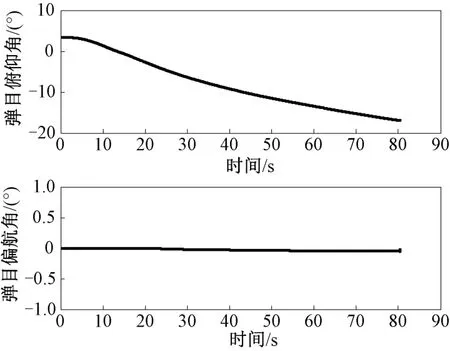
图3 目标相对导弹的俯仰角及偏航角

图4 干扰相对导弹的俯仰角和偏航角
根据导弹、目标和干扰的实时坐标,通过数字仿真,可得到每一时刻导弹相对目标及干扰的距离,分别如图5和图6所示。
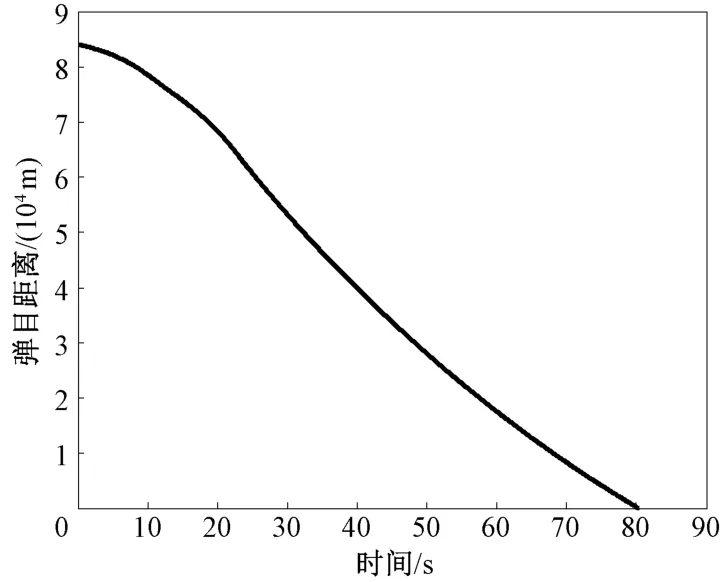
图5 导弹相对目标的距离
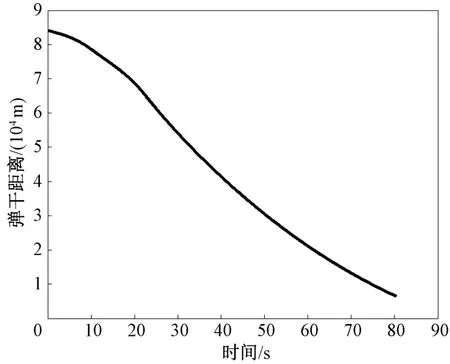
图6 导弹相对干扰的距离
下面针对不同体制的导引头,进一步分析半实物仿真参数。
3.3 主动雷达导引头半实物仿真参数计算
设主动雷达导引头发射天线功率为300 W,发射接收天线增益为30 dB,发射信号频率为30 GHz,目标RCS 为1 m;干扰机发射功率为50 W,发射天线增益为5 dB。主动模式下弹目多普勒频率如图7所示。
图7 主动模式下弹目多普勒频率
主动模式下导引头接收目标回波功率及回波延时分别如图8和图9所示。

图8 主动模式下导引头接收目标回波功率
图9 主动模式下导引头接收目标回波延时
3.4 半主动雷达导引头半实物仿真参数计算
设地面照射雷达发射功率和发射天线增益积为100 dBm,发射信号频率为10 GHz,目标RCS为1 m;干扰机发射功率为50 W,干扰机发射天线增益为5 dB。半主动模式下弹目多普勒频率和目标回波功率如图10和图11所示。
图10 半主动模式下弹目多普勒频率
图11 半主动模式下导引头接收目标回波功率
3.5 干扰信号半实物仿真参数计算
半主动模式和主动模式导引头接收到的干扰信号都是干扰机主动辐射的信号,与导引头体制无关。干扰信号多普勒频率及功率分别如图12和图13所示。
图12 干扰相对导弹多普勒频率
图13 导引头接收到的干扰功率
3.6 半实物仿真输入参数分析
数字仿真结果包含了半实物仿真需要的目标和干扰的信息,通过数据格式转换,即可得到半实物仿真的输入参数。其中,目标和干扰相对导弹的俯仰角和偏航角的数字仿真结果经过数据转换,作为阵列馈电子系统的输入参数;目标和干扰信号的多普勒频率、功率、主动模式下的延时等参数经过数据转换,作为模拟源的输入参数。
仿真过程中,仿真总控系统给各个子系统的控制指令如表1所示。
表1 仿真总控系统发送的仿真控制参数
在半实物仿真中,测试设备模拟弹上计算机的功能,为导引头提供控制指令,导引头将探测到的目标信息回送给测试设备,供试验人员观察和保存。通过对比导引头探测到的目标信息与半实物仿真系统输入的目标参数,分析导引头抗干扰性能。
4 结论
根据投掷式诱饵干扰与对空导引头对抗原理,研究了导引头抗投掷式诱饵干扰半实物仿真方法,分析了导引头抗投掷式诱饵干扰半实物仿真输入参数计算方法,并设计数字仿真场景,计算了导引头抗投掷式诱饵干扰半实物仿真的输入参数,最后分析了数字仿真结果与半实物仿真输入参数的对应关系。研究结果为对空导引头抗投掷式诱饵干扰半实物仿真提供了参考,为导引头抗干扰技术验证提供了支撑。
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
科普童话·神秘大侦探(2022年4期)2022-05-26
海军航空大学学报(2021年1期)2021-09-01
科学与财富(2018年26期)2018-10-24
航空兵器(2018年1期)2018-04-09
阅读与作文(小学低年级版)(2017年10期)2017-10-27
科技与创新(2016年5期)2016-03-17
公务员文萃(2015年9期)2015-09-29
软件导刊(2015年8期)2015-09-18
伴侣(2015年7期)2015-07-16