
沥青罐车在途风险监测系统设计
2022-08-05 03:06樊金禹张瀚坤郭承进高立晓
山东交通科技 2022年3期
樊金禹,张瀚坤,郭承进,高立晓,李 颖
(1.山东高速物资储运有限公司,山东 淄博 255000;2.山东省交通科学研究院,山东 济南 250031;3.山东省路域安全与应急保障交通运输行业重点实验室,山东 济南 250102)
1 研究背景
据公安部统计,截至2021 年9 月,载货汽车保有量达3 242 万辆,占汽车总量的10.91%,而货车引起的责任事故更是占汽车责任事故总量的30.5%,远高于货车保有量占汽车总量的比例。其中因为驾驶盲区所导致的交通事故约占17.1%,造成的伤亡人数占货车责任事故总量的27.81%。
通过事故分析发现,大型车辆事故率高的主要原因:(1)由于大型车辆自身具有“长、宽、高”的结构特点,驾驶员无法通过右侧后视镜及时观察到车辆右侧路况,存在右转盲区;同时,大车在右转弯时,内前轮转弯半径大于内后轮转弯半径,存在内轮差盲区。(2)由于运输路程远、时间长,易出现疲劳驾驶现象,导致驾驶员对车辆的操控精度下降,产生事故风险隐患。(3)由于沥青运输具有单次运输量大、价值高的特点,沥青失窃或泄露事件也时有发生,不仅给运输公司造成了经济损害,也给道路留下安全隐患,危害公众安全。
国内已有相关对大型车辆监测系统的研究与应用,此方向研究开展初期,不少基于车联网的车载终端设计实现了对车辆运行状态及驾驶过程中视频数据的采集与存储,但并未对视频数据进行深层次的提取与分析[1-3]。随着技术的发展,李磊磊[4]开发的大型货车视野盲区层叠式预警系统,可依据货车转弯速度与角度计算盲区范围,发出预警提醒行人或其他车辆避让。张洋[5]设计的罐车在途实时监控系统结合了GPS 定位技术与罐体监测技术,可将车辆GPS 信息与罐体监测信息上传至云端,在网页中以地图形式实时显示各车辆罐体状态。盛敬[6]开发了驾驶员疲劳监控系统,通过图像处理技术对驾驶员状况进行分析,对驾驶员疲劳驾驶行为进行有效识别与预警。上述研究仅可实现单一功能,缺乏系统性与综合性。因此,亟需建立起同时具有盲区监测、疲劳驾驶监测、车辆定位与轨迹回放等功能于一体的罐车在途风险监测系统。
2 系统总体方案
设计系统采用6 路监控相机,分别监控前方路况、驾驶员状态、两侧驾驶盲区与罐体进出口。所拍摄画面通过监控终端进行视频格式整合与分析,判别驾驶员是否存在疲劳驾驶行为、驾驶盲区是否存在行人或车辆。若发生情况,则通过车载喇叭进行警告信息播报,及时提醒驾驶员注意安全。将监控视频在车载显示屏上实时显示、在本地硬盘备份并通过GPRS 模块上传至云平台,供罐车运营公司远程查看车辆运行情况。通过GPS 模块记录车辆轨迹信息,将车辆运行轨迹上传至云平台,系统架构见图1。
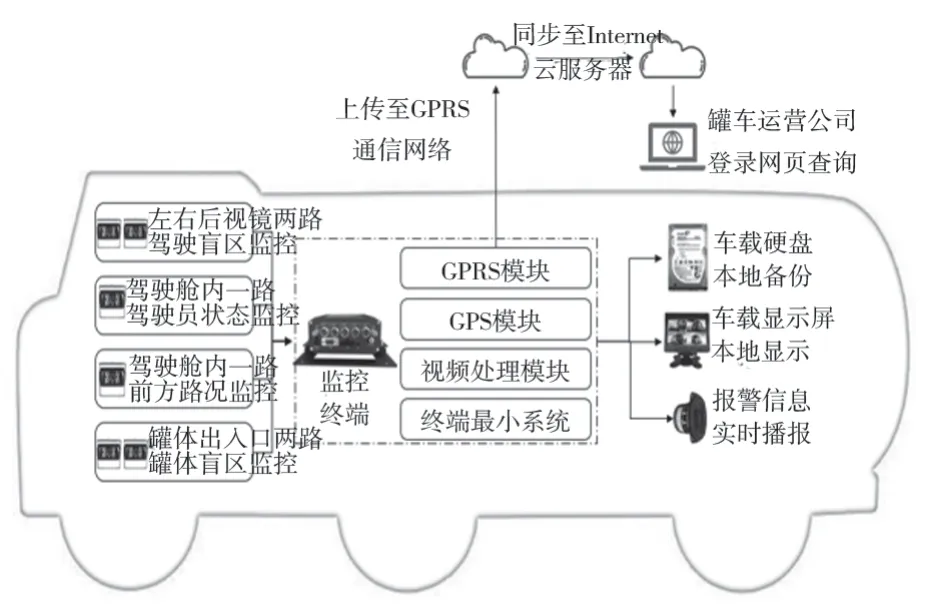
图1 系统工作流程
3 沥青罐车在途风险监测系统硬件设计
3.1 车载终端
车载终端中央处理器为Hi3520D,是内核为ARM Cortex-A9 的高性能处理器芯片,具有视频硬件加速引擎,能够实现系统调度,符合车载视频监控系统的实时性要求;片内集成了高性能视频编解码器,集成TDE、VPSS 和VCMP 三部分对视频图像进行加工和处理,并且接口资源丰富,可采集和处理GPS、GPRS 等模块信息,满足系统应用需求。
3.1.1 控制器最小系统设计
(1)电源电路。系统中各模块电压需求共有两种,其中处理器 Hi3520D 的核心电压为1.25 V,摄像头所需电压为5 V。(2)时钟电路设计。所需时钟信号共有三种:频率为32.768 kHz 的Hi3520D 时钟模块外接信号;频率为24 MHz 的Hi3520D 的系统时钟信号;频率为12 MHz 的SD 卡数据读取芯片时钟信号。(3)复位电路设计。为完成系统上电复位,本系统包含复位电路,采用专用复位芯片ADM809,可以精确检测处理器电压。
3.1.2 GPS 定位模块
GPS 定位模块的功能是通过接收卫星信号,解算出车辆当前位置、速度、时间等信息。本系统选用的GPS 模块为韩国Gstar 的GS-87 模块。
3.1.3 GPRS 通信模块
GPRS 模块的功能是无线通信,可将所采集视频信号通过GSM-GPRS 网络上传至云平台。本系统中GPRS 模块选用SIMCom 公司的SIM300,功耗较低,信息传输稳定。
视频采集电路设计采用Richnex 公司的RN6318A芯片对六路监控视频进行合成。该芯片可同时支持ITU-R BT.656、BT.1302、YCbCr 4 ∶2 ∶2 等多种格式的输出,符合后文图像处理算法对视频格式的需求。
3.2 监控相机
选用6 台VIS-108P 宽动态监控相机,分别监控前方路况、驾驶员状态、两侧驾驶盲区与罐体进出口。相机安装位置与监控范围见图2。

图2 监控相机布设位置及监控范围
3.3 车载显示屏
采用Nexcom公司的IPPD1100加固车载显示屏,采用电容式触屏原理,识别精度高,能有效减少驾驶员误操作概率,降低驾驶员因操作系统而导致的分心驾驶时间。显示屏下方设有亮度调节按键,方便驾驶员在外界亮度变化时快速改变屏幕亮度,以便观察驾驶盲区画面。
4 沥青罐车在途风险监测系统软件设计
4.1 软件总体流程设计
车辆启动时,系统软件运行流程见图3。
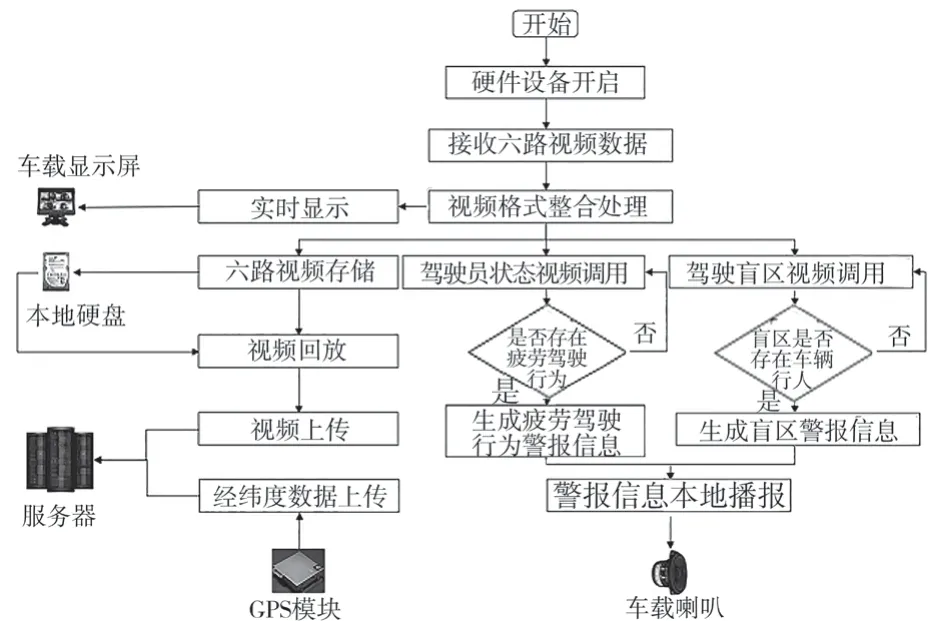
图3 软件流程
4.2 监控相机宽动态功能
监控相机的宽动态功能可通过二次曝光技术解决车辆受强光照射而导致的图像质量下降问题。如夜间行车时若监控相机受到远光灯照射,被远光灯直射的区域会因曝光过度成为白色,其他区域会因曝光不足而成为黑色。故采用宽动态技术,可同时对当前画面进行不同速度的两次曝光,在对快慢两次曝光的图像进行标记后,将两张图像亮度、色度、对比度等色调属性进行映射,再检测并去除图片中运动物体所产生的伪影,最后即可进行图像合并,输出一帧宽动态图像。
4.3 盲区监测功能
系统的盲区监测功能通过视频图像处理的方式实现,先提取左右路监视盲区监控相机的当前帧视频画面,为降低算法复杂度,加快图像处理速度,采用灰度化处理算法去除图像的色彩信息。借助积分图算法计算图像亮度后,利用动态模板匹配算法,找到画面中可能存在车辆或行人的区域,再使用Adaboost 分类器对各区域内是否存在车辆或行人进行判断,并发布对应警报信息,提醒驾驶员注意。
4.4 疲劳驾驶监测
(1)使用基于肤色模型与最大类间方差的人脸分割算法,对驾驶员状态监控画面中的驾驶员面部区域进行捕捉。(2)使用基于卡尔曼滤波的面部跟踪算法对面部画面进行跟踪;并通过像素指针的方式,分别提取画面中驾驶员眼睛与嘴部开度信息。(3)利用神经网络,根据驾驶员疲劳时的眨眼频率与打哈欠幅度确定疲劳驾驶判断阈值,当驾驶员眼部开合频率与嘴部张开幅度超过阈值时,通过车载喇叭发布疲劳驾驶警告,提醒驾驶员安全驾驶。
4.5 车辆定位与轨迹回放功能
在车辆运行过程中,GPS 模块将车辆位置信息实时上传至云平台上,云平台网页页面中设有地图插件,用户可在地图上查看各车辆实时位置。各车辆历史位置数据也将存储在数据库中,在用户使用轨迹回放功能时,需选定轨迹回放时间区间,系统从数据库中调取该车辆在此目标区间内的历史点位数据,在地图中连点成线即可生成车辆历史轨迹。
5 系统功能实现
试运行系统运行情况良好,可基本满足用户需求。根据反馈意见进一步完善举措:(1)阴天或夜晚时,显示屏亮度过高,此时手动调节显示屏亮度将造成分心驾驶,存在安全隐患。后期可加入亮度传感器,根据环境亮度自动调节显示器屏幕亮度。(2)疲劳驾驶预警算法偶尔会产生误判,经过对误判影像分析,为驾驶员在说话时的嘴部状态被算法误判为打哈欠,后期可针对打哈欠与说话时嘴部的区别完善算法,进一步减少算法误判率。
6 结语
沥青罐车在途风险监测系统功能综合性强,试运行后可满足日常运营需求,针对驾驶员所反馈的亮度与疲劳驾驶误判问题,后期将增加显示屏亮度自动调节功能,并完善疲劳驾驶判别算法。
猜你喜欢
航天返回与遥感(2022年4期)2022-09-03
汽车实用技术(2022年14期)2022-07-30
趣味(数学)(2022年4期)2022-07-02
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
家庭影院技术(2021年6期)2021-07-28
小雪花·初中高分作文(2019年2期)2019-06-27
摄影之友(影像视觉)(2019年3期)2019-03-30
活力(2019年22期)2019-03-16
小天使·六年级语数英综合(2017年5期)2017-05-27
