施工过程安全数字孪生模型的构建和应用*
2022-08-06 03:30赵挺生
中国安全生产科学技术 2022年6期
周 炜,王 亮,赵挺生,陈 磊,李 聪
(1.中建三局第一建设工程有限责任公司,湖北 武汉 430040;2.华中科技大学 土木与水利工程学院,湖北 武汉 430074)
0 引言
建筑工程存在大量高风险、工艺流程复杂、技术难度大的施工过程(如起重机械安拆、土石方开挖等),针对该类施工过程进行重点监控是现场安全管理的重要环节。受施工现场多源风险耦合和动态环境作用,传统人工巡检方式因实时性和准确性局限,无法对施工活动的工艺流程、安全技术参数和风险等进行动态控制[1]。
基于物联传感技术能够实时感知施工过程特定参数[2],判断特定实体(如工作步)是否满足安全阈值[3-4],但施工过程包含大量流程逻辑规则和技术参数关联关系,难以被数字化表达,现有技术无法感知和判断时空维度下施工过程系统的整体行为和属性(如工序进程、动态风险等),难以实现对施工过程整体的安全控制,制约对施工过程安全的智慧监控。
随着数字化技术不断发展,数字孪生成为各个领域的研究热点。在NASA技术报告中,数字孪生(Digital Twin,DT)被正式提出并被定义为“集成了多物理量、多尺度、多概率的系统或飞行器仿真过程”[5]。数字孪生以数字化方式建立多维、多时空尺度、多物理量的虚拟实体,能够实时仿真和刻画物理实体在真实环境中的属性、行为、规则等[6-7]。王佳奇等[8]基于数字孪生构建瓦斯事故孪生模型,实现瓦斯事故的事前预防和快速响应;Boje等[9]指出数字孪生提供物理活动与虚拟世界同步手段,结合仿真和预测方法可为实现施工过程安全的动态监控提供技术支持。
本文基于本体建立施工过程安全的语义本体,明确施工过程安全关键知识要素,构建施工过程安全数字孪生多维模型,基于物联网和有限状态机阐述模型实现施工过程安全控制的方法,并以某塔吊顶升活动安全监控为例进行实际运用。研究结果可为实现施工过程全要素数字化、减少安全事故提供指导。
1 施工过程安全知识分析
为实现施工过程安全在虚拟世界中的数字化表达,系统分析施工过程安全管理知识,获取施工过程关键知识要素,建立各类知识要素数据元。
在施工安全领域,本体凭借知识表达、共享、推理和机器可读能力引起学者关注,大量安全本体被用以整合和结构化表达各类型安全知识[10-11]。通过系统分析施工过程相关工艺流程和安全管理要求,建立施工过程安全语义本体,如图1所示,可用于可视化表达施工过程安全知识中各类概念及概念间相互关系。
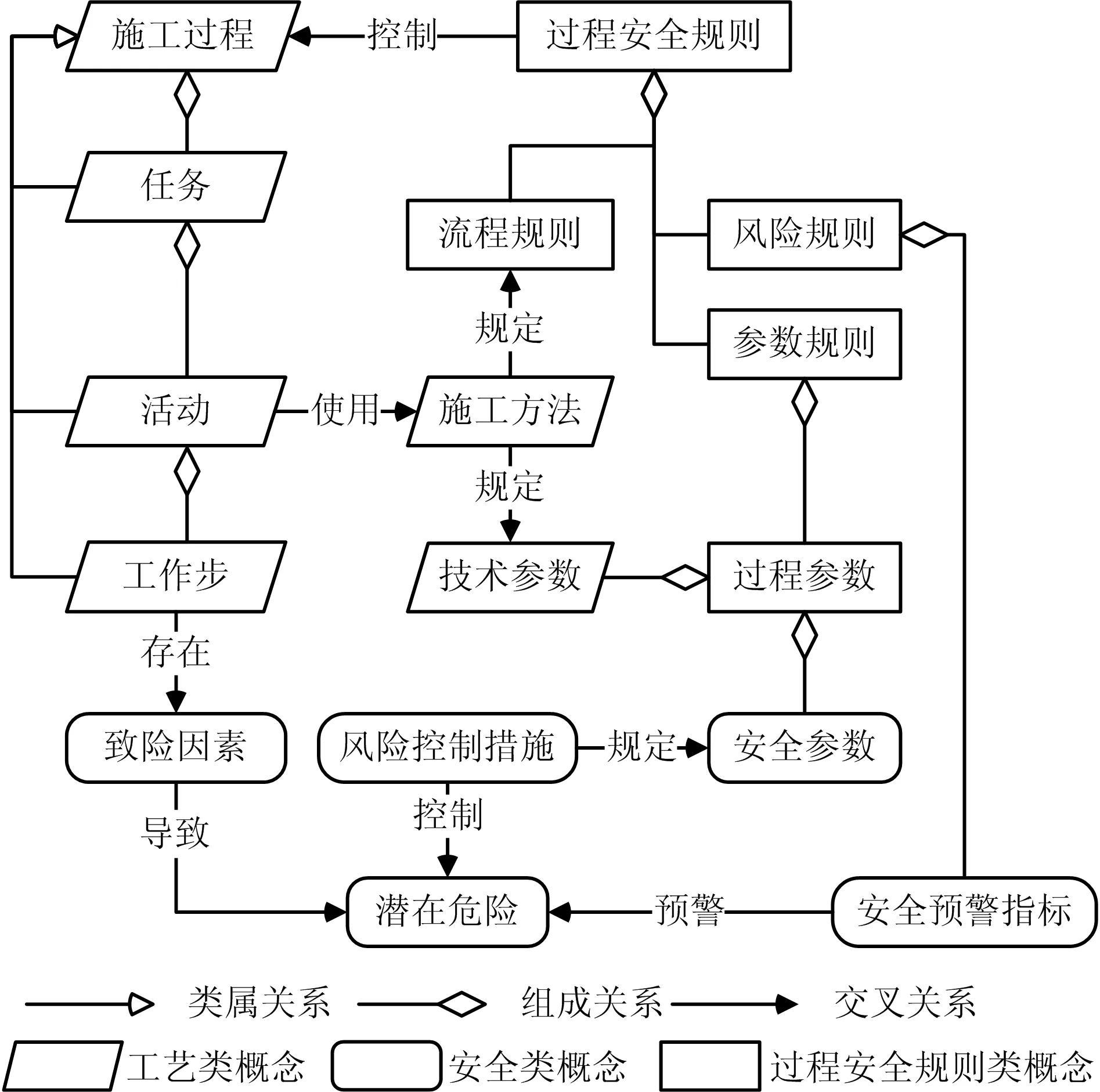
图1 施工过程安全语义本体
施工过程安全语义本体描述3类概念(工艺类概念、安全类概念和过程安全规则类概念)以及各概念之间的链路关系。工艺类概念包含施工过程、任务、活动、工作步、施工方法和技术参数等概念。其中,任务、活动和工作步为施工过程的子类,同时也描述施工过程层级;工作任务是施工过程的子过程,每个工作任务由1套活动组成,每个活动由不同工作步构成。施工方法规定工作步遵循的流程规则和技术参数。
安全类概念包含致险因素、潜在危险、风险控制措施、安全预警指标和安全参数等。工作步与致险因素通过“存在”关系链接,表述工作步中存在的致险因素。致险因素指引发施工过程中各类潜在危险(如塔吊倒塌和塔臂折断等)的因素,即致险因素“导致”潜在危险。通过制定风险控制措施对施工过程中的潜在危险进行“控制”,风险控制措施中“规定”执行工作步安全参数。此外,通过构建安全预警指标,能够对潜在危险进行“预警”。
过程安全规则类概念包含过程安全规则、流程规则、参数规则、风险规则和过程参数等。过程安全规则“控制”施工过程,是过程作业安全的控制条件,由流程规则、参数规则和安全规则共同构成:流程规则描述执行工作步遵循的工艺流程,而工艺流程由施工方法决定,所以施工方法“规定”流程规则;参数规则描述开始/结束工作步前需满足准入条件/准出条件,过程参数包含技术参数和安全参数,用于构建工作步的准入条件/准出条件,所以过程参数是参数规则的一部分;风险规则描述执行工作步需要监控的警情状况,由安全预警指标组成。
综上,施工过程安全语义本体中工艺类、安全类和过程安全规则类概念是虚拟世界中刻画施工过程安全的关键知识要素。
2 施工过程安全数字孪生模型
2.1 模型构成
结合施工过程安全关键要素和陶飞等[12]提出的数字孪生五维模型,构建施工过程安全数字孪生模型(Construction Process Safety Digital Twin,CPS-DT),模型结构如图2所示。该模型建立施工过程安全的虚实双向交互的映射机制,为施工过程中安全数据融合和安全智慧监控提供参考架构,为施工过程安全管理提供更加实时、高效和智能的服务。

图2 施工过程安全数字孪生模型
施工过程安全数字模型包含施工过程物理实体PPE,施工过程安全虚拟实体PVE,施工过程安全孪生数据PDD,安全控制服务SCS和各组成部分间的连接CN等,可定义为5元组MCPS如式(1)所示:
MCPS=(PPE,PVE,PDD,SCS,CN)
(1)
在PPE上布设数据采集装置,通过物联网手段实时感知和存储施工监测数据。PVE以数字化方式刻画施工过程物理实体,动态描述施工过程安全要素状态,是能被计算机识别的数字模型。PVE包含施工过程模型RV和安全仿真模型BV:RV基于施工过程安全语义本体建立,能够存储施工过程安全的知识要素,形成施工工艺、施工安全和过程安全规则数据;BV是基于RV建立施工过程安全的仿真模型,能够在物联网采集数据驱动下对PPE实时仿真,输出施工过程安全状态,例如当前工作步、过程参数的时间序列以及当前安全风险。PDD是通过PVE建模和物联网采集数据手段构建现实世界施工过程安全向数字世界的映射。SCS为PDD驱动下通过既定规则和物联网传输手段开展操作指引、安全预警和动态控制等服务,实现对现实世界施工作业工人和机械设备的实时控制。CN为MCPS模型各组分的互联,是模型各组分交互的渠道。
2.2 模型实施方法
结合施工过程安全数字孪生模型、物联网技术和有限状态机,施工过程安全监控实现流程包括以下4个步骤:
步骤1):确定现实世界中施工过程物理实体PPE,根据施工过程安全语义本体,从施工方案中提取PPE的关键知识要素,将施工过程安全知识参数化存储于特定的物理结构中,表达为计算机能识别的施工过程模型RV。
步骤2):选取施工过程模型RV中过程参数和安全预警指标为监测内容,在施工过程物理实体PPE上布设物联网数据采集装置和预警装置,施工过程中实时采集信息,获取施工监测数据,并实时接收控制指令进行安全预警。
步骤3):建立RV的安全仿真模型BV,BV在施工监测数据驱动下实时仿真,分析施工过程物理实体PPE的实时行为,存储过程仿真数据。
采用有限状态机(Finite State Machine,FSM)方法建立BV。FSM是1种输入输出系统,表示有限状态及状态间转移和动作等行为的模型[13]。设FSM为5元组如式(2)所示:
F=(S,O,E,T,W)
(2)
式中:S为有限状态集;O为特定状态下执行的输出动作集;E为能够接收的输入事件集;T为状态转移函数,T:S×E→S规定状态和事件的映射逻辑,代表状态间的跳转逻辑;W为输出函数,W:S→O规定状态和动作的映射逻辑,代表不同状态执行的动作。
具体实现方式包括:建立施工过程安全状态机,设置S存储施工过程工作步;E存储过程参数和参数规则;O存储安全预警指标和风险规则;将工作步和过程参数与流程规则和参数规则结合建立T;以工作步和关联安全预警指标,结合风险规则构建W。当施工监测数据触发E中过程参数满足参数规则时,驱动状态机实时仿真,执行T和W,输出当前工作步、过程参数和安全警情指标时间序列,存储过程仿真数据。
步骤4):建立安全控制服务SCS,在PDD驱动下进行数据分析和风险决策,实时将控制信息反馈至PPE。
3 案例实证
塔吊顶升活动是具有代表性的高风险施工过程[14]。本文以某项目TC6013型塔吊顶升活动为例,具体说明施工过程安全数字孪生模型的应用。
3.1 塔吊顶升过程模型
选取待监控的塔吊顶升活动,从专项施工方案中提取顶升活动的关键知识要素,见表1。建立塔吊顶升施工过程模型,将施工工艺数据和风险控制数据存储于计算机中。

表1 塔吊顶升活动关键知识要素
3.2 数据采集和传输
根据塔吊顶升活动的过程参数和安全预警指标,制定监测方案,见表2。在施工现场布设数据采集装置、预警设备、物联网传输装置和服务器,搭建塔吊顶升活动物联网监控系统,如图3所示。数据采集装置实时感知现实世界塔吊顶升活动监测指标状态,物联网传输装置采用RFID、WIFI和5G等方式建立施工监测数据和安全控制信息的无线传输通道,服务器构建数据库动态存储塔吊顶升活动数字孪生数据,并为虚拟世界中安全动态仿真和安全控制提供计算和存储资源。

图3 塔吊顶升活动物联网监控系统

表2 塔吊顶升活动监测方案
3.3 安全仿真模型建立
基于FSM建立塔吊顶升活动状态机,在施工监测数据驱动下,对现实塔吊顶升活动进行仿真,实时输出塔吊顶升活动工作步、过程参数和安全指标状态等过程仿真数据,如图4所示。顶升活动所有工作步jobi转化为FSM状态集S。构建输入事件集E={ei/i=1,2,…,9}存储工作步关联的过程参数,ei用监测指标规则组合表示。例如表1中job3关联的过程参数涉及监测指标P1,P2,P3,P4,根据监测变量阈值e3可表示为“P3∈[1.45 m,1.55 m]∧P1=1∧P2=1∧P4∈[0,0.5 m/min]”。构建输出动作集O={oi/i=1,2,…,9},存储工作步关联的安全预警指标。例如表1中job6关联的安全预警指标为塔身倾斜度、风速和顶升速度等,则o6表示为P4∈[0,0.5 m/min]∧P8∈[-14.4″,14.4″]∧P9∈[0,8 m/s]”。依据顶升活动的串联流程和输入事件,构建状态转移函数T:S×E→S,其中T(ei,jobi)=jobi+1;依据顶升活动各工作步与输出动作的对应关系,构建输出函数W:S→O,其中W(jobi)=oi。

图4 塔吊顶升活动状态机
3.4 塔吊顶升安全监控
1)控制内容
根据控制理论[15]和CPS-DT的安全控制服务,建立塔吊顶升安全控制结构,如图5所示。控制结构由受控对象、执行器、感知器和输入输出构成。控制结构的控制器为塔吊安全控制服务,受控对象是塔吊顶升活动,执行器为现场工人,通过接收控制器的控制指令,调整施工操作;感知器为塔吊顶升活动数字孪生数据,实时为控制器提供开展塔吊安全控制服务信息。

图5 塔吊顶升安全控制结构
参考施工过程安全关键知识要素,塔吊顶升安全控制涉及施工过程的工作步流程、过程参数和安全风险等,目标函数如式(3)~(6)所示:
OptF[Job,Pr,Pa,Sr]
(3)
Pr=[job(i,i+1)]
(4)
Pa=[pa(jobt)]
(5)
Sr=[sr(jobt)]
(6)
式中:Job代表工作步;Pr表示工作步流程执行情况;Pa表示过程参数执行情况;Sr表示安全风险状态;job(i,i+1)为工作步转移向量;pa(jobt)为过程参数状态值向量;pa(jobt)为安全预警指标状态值向量。
塔吊顶升安全控制使施工过程中各工作步实时满足流程规则、参数规则和风险规则要求,约束条件如式(7)所示:
(7)
式中:CPr为规定的流程规则;Cvalue_pa为参数规则;Cvalue_sr为风险规则。
2)效果分析
将施工过程安全数字孪生模型运用于塔吊顶升活动,实现塔吊顶升安全监控。主要效果包括3个部分:①通过物联网手段动态感知塔吊顶升活动安全信息,数据驱动下仿真模型可实时对顶升活动安全进行分析和决策,部分监测指标和工序时程示例如图6所示。②依据顶升活动工序进展,控制系统可结合顶升活动关键知识要素对塔吊工人进行操作指引,在执行施工动作前语音播报施工工艺和技术要求,指导工人施工。③塔吊工人执行工作步过程中,控制系统依据数字孪生数据,实时判别各工作步的安全偏差,进行语音播报预警,实时提醒工人调整施工操作行为,满足安全施工流程、参数和风险规则,实现塔吊顶升活动安全控制目标。

图6 塔吊顶升活动安全监控时程
4 结论
1)通过定义施工过程安全语义本体,可对施工过程安全知识进行可视化表达,明确施工过程安全关键知识要素包含工艺类、安全类和过程安全规则类概念。
2)基于数字孪生构建施工过程安全数字孪生模型,阐述模型构成和机理,建立施工过程安全数字化表达和安全智慧监控实施方法。
3)以塔吊顶升活动为例,详细介绍施工过程安全数字孪生模型实施步骤,综合运用物联网技术和有限状态机实现塔吊顶升活动安全监控。
猜你喜欢
房地产导刊(2022年5期)2022-06-01
小猕猴智力画刊(2022年3期)2022-03-29
商品与质量(2021年43期)2022-01-18
珠江水运(2021年15期)2021-11-23
建材发展导向(2021年7期)2021-07-16
数学小灵通(1-2年级)(2021年4期)2021-06-09
河南建材(2021年12期)2021-01-07
铁路技术创新(2020年5期)2020-02-25
当代工人(2019年19期)2019-11-22
建材发展导向(2019年5期)2019-09-09