
周扫像移补偿大面阵红外光学系统
2022-08-11 06:09刘玉环
电光与控制 2022年8期
刘玉环, 周 军, 盛 忠, 李 娟, 熊 健
(北京遥感设备研究所,北京 100000)
0 引言
红外搜索与跟踪(IRST)系统在战场态势感知、环境安全监测等领域具有重要地位。大空域、全方位、远距离探测、识别与跟踪是新一代IRST系统追求的目标[1-2]。IRST系统实现大空域、全方位搜索与跟踪在硬件上主要依靠具备快速扫描功能的光学系统及其配套的伺服系统[3-4]。当IRST系统在某个方向快速周扫工作时,由于积分时间与运动速度的不匹配,会出现像移,导致接收的图像出现运动拖尾乃至模糊现象,此时需要IRST系统具备像移补偿即稳像能力。
IRST系统的稳像与光学防抖等稳像具有较大区别,主要在于其精度要求极高:需具备极高的扫描速度,如舰载和地面IRST一般要求周扫速度在360~720 (°)/s;为满足远工作距离而要求积分时间较长,根据所处平台不同,中波红外系统积分时间一般为1~4 ms,长波红外系统积分时间一般为0.5~2 ms;扫描过程中须具备较高的稳定角精度,一般为10 μrad以下[5]。
对于高精度光电探测系统,常用的稳像方法有光学稳像法[6]、机械稳像法[7]、集成稳像法[8]和电子稳像法[9]。目前,光学稳像法和机械稳像法在IRST系统上应用较多,集成稳像法和电子稳像法受限于目前的器件、信号处理水平以及系统实时性要求,应用受到较大限制。基于目前红外探测系统的软硬件水平,本文介绍一种采用光学稳像方法实现长积分时间快速周扫消像移大面阵红外光学系统,集成后的光学样机能稳定地搜索跟踪目标,成像分辨率极高,表明该光学系统相关指标处于国内领先水平。
1 光学稳像原理
1.1 光学稳像原理
根据稳像光学元件在光路中的位置,光学稳像可分为平行光路稳像和会聚光路稳像。在周扫IRST系统中,会聚光路稳像存在稳像元件扫描角速度低且非线性失真的问题。平行光路稳像光路构成简明,反射镜稳像方式简洁,采用高比刚度材料制成的轻量化反射镜可以满足1000 (°)/s以上的扫描角速度要求,且平行光的形式可以实现绝对稳像。
当光学系统在方位或俯仰方向以角速度ω0进行周扫时,红外探测器积分时间为t,则光学系统在扫描方向对应的瞬时视场漂移过的角度为ω0t。高精度IRST系统的角分辨率可达到0.1 mrad,若ω0=360(°)/s,t=3 ms,则目标点在像面拖尾区域将达到360(°)/s×3 ms/0.1 mrad=188.5 像素,将直接导致探测能力的丧失。
平行光路稳像的原理如图1所示。
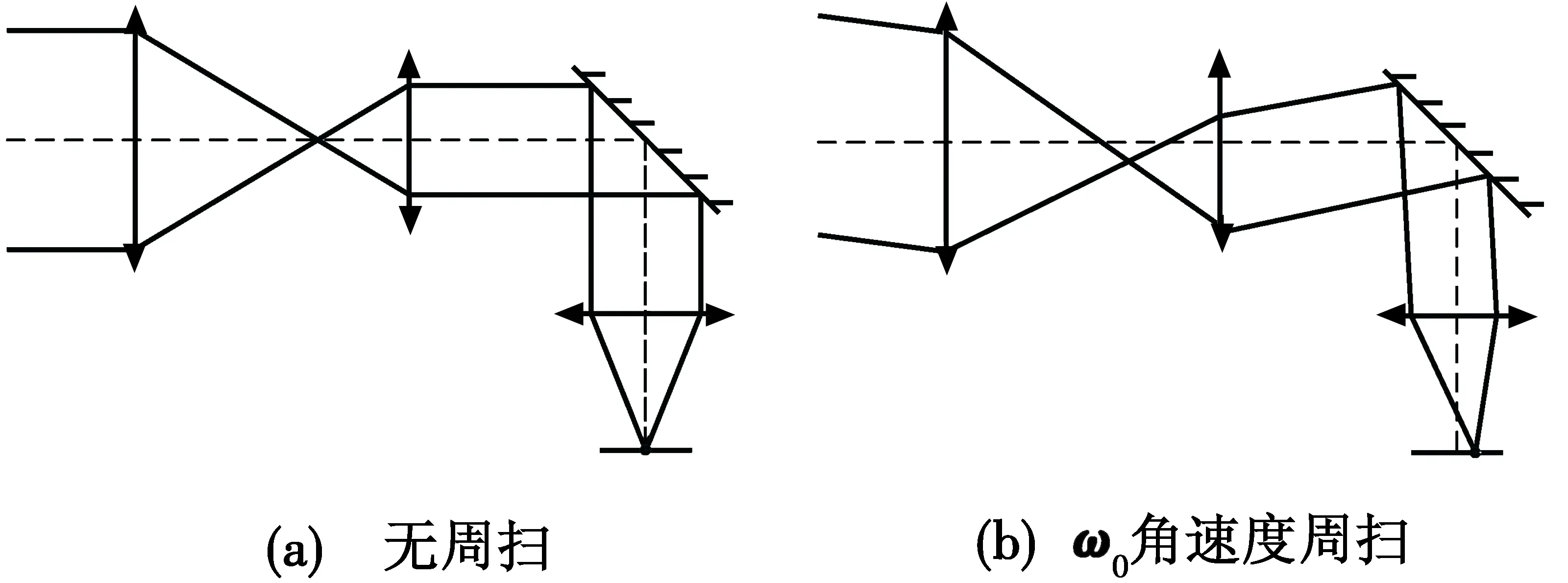

图1 平行光路稳像原理
当不发生角速度ω0周扫时,0°入射光线将会聚在探测器焦平面中心位置,如图1(a)所示;当发生角速度ω0周扫时,经过t积分时间的扫描,目标与光轴产生相对偏移,目标发出的0°光线将以ω0t角度入射光学系统,在探测器焦平面上的会聚点将偏离中心位置,如图1(b)所示;若在角速度ω0周扫时,通过稳像摆镜摆动一个特定角度,则可将该ω0t入射光线在探测器焦平面上的会聚点重新校准到中心位置,如图1(c)所示。
1.2 平行光路稳像光学系统的参数
从图1可以看出,平行光路稳像光学系统由前组望远镜组和后组会聚镜组两部分组成。光学系统的焦距f′可以表示为
(1)

t积分时间对应的稳像反射镜补偿角度θ为
(2)
2 长积分时间快速周扫下像移补偿大面阵红外光学系统设计
2.1 光学系统参数
根据IRST系统探测要求,光学系统的主要技术指标如下:1) 工作波段为3.7~4.8 μm;2) 视场为4°×3.2°;3) 探测器规格,F/2,1280×1024元,像元15 μm×15 μm;4) 周扫速度为360 (°)/s,位于4°视场方向;5) 积分时间为4 ms;6) 工作温度为-40~60 ℃。
为保证扫描精度及提高角速度,取望远镜组角放大率为5×,对应的稳像反射镜补偿摆动角为3.58°。此时在单帧下,需要补偿的目标与光轴的角度偏移量为1.44°。
2.2 光学设计
根据以上参数进行光学系统设计,设计光路如图2所示。

图2 设计光路Fig.2 The designed optical path
图2中,光学系统包络为385 mm×195 mm×140 mm,该光学系统共采用10片透镜。为消除长焦大视场带来的轴外像差,共采用了3个非球面表面;为消除色差和热差,对10片透镜的材料进行了精细搭配,使用材料包括Si,Ge和ZnSe等。
控制瞳的位置可以使稳像摆镜尽可能小,图3为稳像摆镜上的光线足迹分布图,依此可以确定摆镜尺寸为40 mm×29 mm。
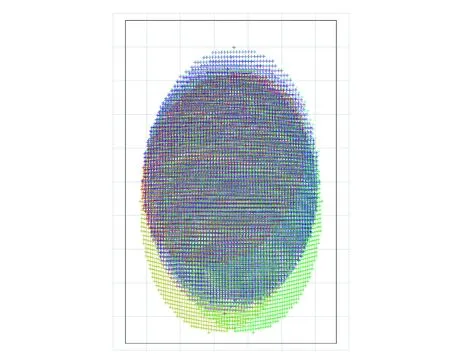
图3 稳像摆镜上的光线足迹Fig.3 Light footprint on image stabilization mirror
2.3 成像质量评价
图2所示光路的光学系统传递函数曲线如图4所示,单像元包围圆能量是远距离点目标探测系统的重要指标[10],光学系统在-40~60 ℃下的能量集中度曲线如图5所示。从图4和图5可以看出,该光学系统在-40~60 ℃下成像质量接近衍射极限。

图4 光学系统传递函数Fig.4 MTF of the optical system



图5 光学系统在高低温下的能量集中度曲线Fig.5 Energy concentration curve of the optical system at high and low temperatures
3 周扫成像效果
光学系统集成样机后进行了周扫成像效果测试。在搜索工作状态下,方位周扫速度为360 (°)/s,积分时间为4 ms,在平行光管中对四靶标分别进行了下述3种状态下的成像测试:1) 未开启搜索状态,即四靶标与红外探测系统相对静止;2) 开启搜索状态,稳像补偿功能未开启;3) 开启搜索状态,稳像补偿功能开启。3种测试状态下采集的图像如图6所示。

图6 周扫补偿成像效果对比Fig.6 Comparison of imaging effects under the condition of scanning compensation
由图6可见,稳像补偿后的图像与相对静止状态下的图像几乎一致,说明光学系统的稳像光路设计是成功的。图7为该光学系统样机对15 km处的场景进行搜索成像后的红外全景图像,该全景图像稳定清晰、分辨率较高,具有较为震撼的视觉效果,表明该光学系统的相关指标及成像探测能力具有国内领先水平。

图7 15 km处场景的红外全景图像
4 结束语
像移补偿是IRST系统进行快速扫描的关键技术之一。本文介绍了一种像移补偿IRST光学系统,该系统具有1k级的面阵规模、4 ms级的积分时间、360 (°)/s级的周扫速度等技术特点。基于目前红外探测系统的软硬件技术水平,该光学系统采用平行光路稳像方法,其设计结果以及光学样机周扫成像测试结果表明,该光学系统的相关指标及成像探测能力代表了目前IRST领域的国内一流水平。
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
铁道通信信号(2020年9期)2020-02-06
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2018年23期)2018-12-26
中学物理·高中(2018年10期)2018-11-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
理科考试研究·初中(2017年5期)2018-03-07
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国高新技术企业·综合版(2013年1期)2013-02-04
