太阳光谱辐照度仪波长扫描设计
2022-08-22 12:58王洋李新黄雄豪刘恩超张艳娜
量子电子学报 2022年4期
王洋,李新,黄雄豪,刘恩超,张艳娜
(1中国科学院合肥物质科学研究院安徽光学精密机械研究所,中国科学院通用光学定标与表征技术重点实验室,安徽 合肥 230031;2中国科学技术大学,安徽 合肥 230026)
0 引言
近年来,随着大气温度、组成及其动力学相关测量工作的开展,太阳光子在大气层面被吸收的理化过程正日渐清晰地呈现出来。随着大气模型的日益精确,太阳光谱辐照度作为重要的输入因素之一,其测量不确定度方面的要求也随之提高。不同于太阳总辐照度仪获取太阳辐射总量的变化,太阳光谱辐照度仪分析太阳辐射能量在不同光谱波段内的分布变化。精确测量各波段的太阳辐射光谱有助于提高各痕量气体的反演精度,更准确地理解上述吸收过程,从而进行不同地物特征下的气候效应评估[1]。因此,太阳光谱辐照仪在测量精度和稳定性方面也具有较高的要求。
为实现太阳光谱辐射的高精度测量,太阳光谱辐照度仪采用光谱扫描结合单元探测器测量光谱辐射的方式,该方法具信噪比高、数据稳定、节省仪器空间等优点。色散光谱的高精度测量需要精确的波长定位来保障,扫描机构作为活动部件,对波长扫描精度、波长测量重复性以及长期运行的稳定性均有显著影响[2]。传统的扫描结构中多采用低速同步电机、步进电机等旋转电机作为驱动装置,具有机构复杂、中间存在间隙、稳定性低等缺点,难以实现高精度的扫描定位,并且体积和噪声较大,不符合轻便化的需求[3]。综合比较各类电机的功能与性能,最终选择小型交流伺服电机作为扫描定位的驱动装置,它是将超薄型的精密控制减速机Harmonic Drive和超扁平AC伺服电动机一体化的AC伺服执行元件,具有体积小、精度高、无滞后等优点。为实现高精度的扫描定位控制,采用基于微处理器的方法驱动CCD,并利用重心法进行质心检测,用于调整电机的旋转角度,从而形成闭环控制。最后开展了扫描定位装置的性能测试,确定扫描定位的精度。
1 基本原理与控制设计
1.1 测量原理与总体设计
太阳光谱辐照度仪由光谱测量单元和波长扫描单元组成。光谱测量单元用于实现棱镜的分光和探测器的测量,波长扫描单元用于准确控制和获取棱镜旋转角度。太阳光谱辐照度仪原理框图如图1所示,其中波长扫描单元是由入射狭缝、小型交流伺服电机、凹面反射镜和线阵CCD组成。扫描定位结构图如图2所示,棱镜与凹面镜共轴,电机带动凹面镜旋转轴旋转时,可以通过测量凹面镜对入射狭缝成像光斑的线位移来确定电机旋转的角度,从而可以获得棱镜旋转的角度。该系统结构简单无间隙,电机所带负载较小,保证了运行时的稳定性与可靠性。
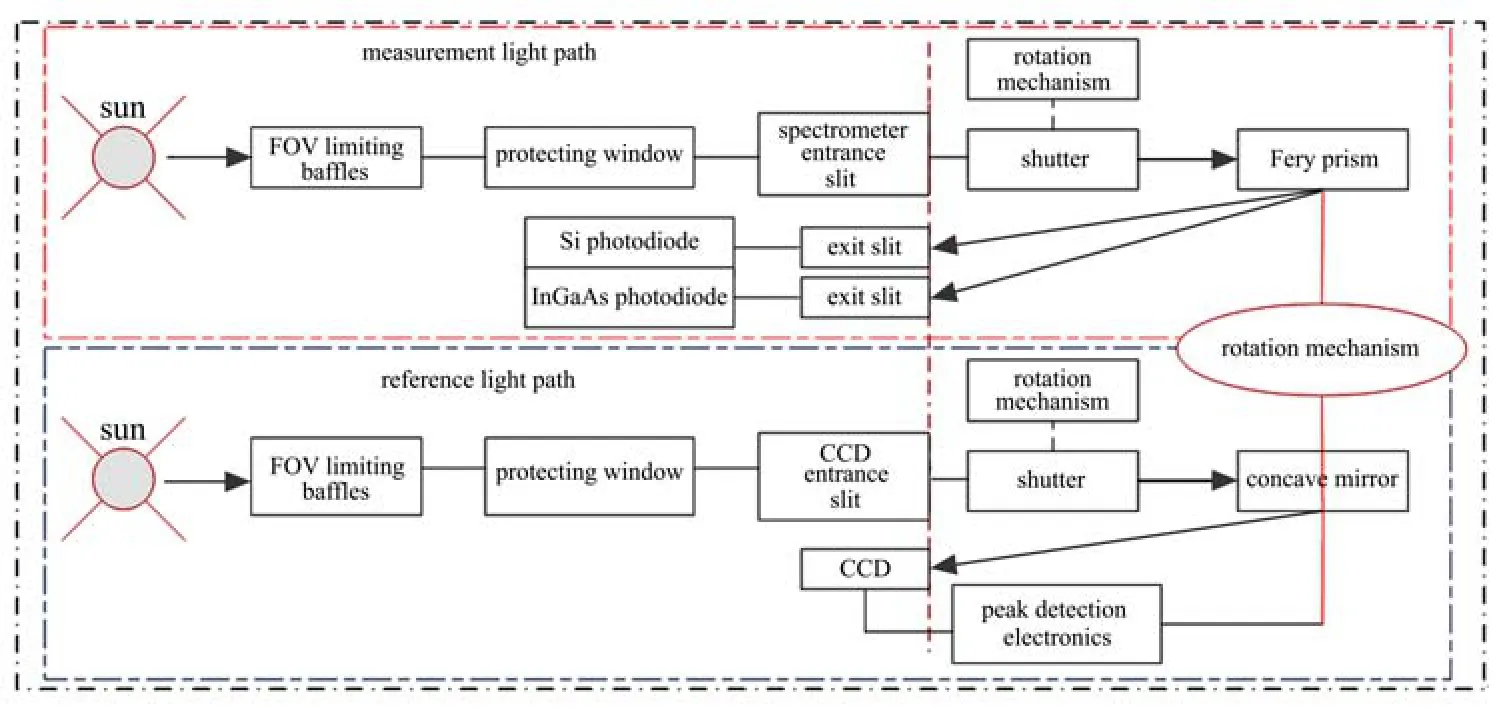
图1 系统原理框图Fig.1 Schematic diagram of system principle
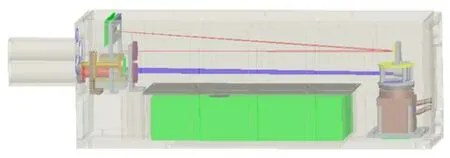
图2 扫描定位结构图Fig.2 Structurediagram of scanning and positioning
为了实现高精度扫描定位控制,利用STM32的微处理方式驱动线阵CCD工作,对CCD输出信号进行A/D转换,并计算狭缝成像光斑质心位置。采用定时器主从方式控制电机旋转角度,结合CCD检测的质心位置与预设位置的偏差调整电机的旋转角度,形成闭环控制。
1.2 交流伺服电机的控制
为了满足高精度、高分辨率、大行程和结构简单等要求,采用哈默纳克的小型交流伺服电机作为扫描机构的驱动。交流伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动。在选择交流伺服电机时,主要考虑以下几个参数[4]:1)分辨率:交流伺服电机输出的轴分辨率取决于电动机轴编码器4倍频时的分辨率和减速比,本次选用电机的输出轴分辨率为240000 p/rev,即1个脉冲转0.0015◦;2)定位精度:指在固定的旋转方向上不断进行定位,在各个位置计算相对于基准位置的实际旋转角度与应旋转角度之差;3)带载能力:由于交流伺服电机具有较强的过载能力、较小的转动惯量和较大的转矩,而本系统带载较小,故满足要求。
综合上述因素,最终选择型号为FHA-8C-30-E200A-CK的交流伺服电机作为驱动装置,其主要参数如表1所示。
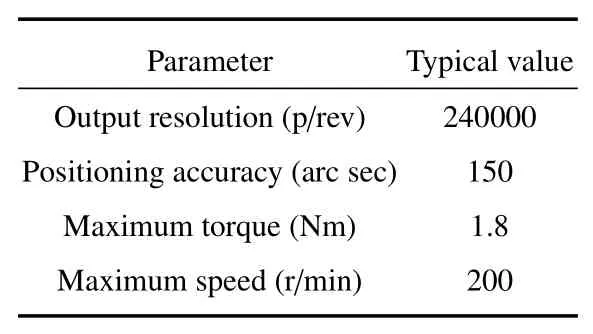
表1 交流伺服电机的主要性能参数Table 1 Main performance parameters of AC servo motor
1.2.1 电机驱动设计
为更好地与交流伺服电机匹配,选择美国Copley control公司生产的APM-090-30伺服驱动器,其内部集成度高、稳定可靠、操作方便。为使电机正常平稳运行,驱动器需要与电机的参数进行配置。设置电机为数字量输入、位置控制等,并进行关键的PID参数整定[5],伺服电机的PID参数整定主要包括电流环、速度环、位置环。PID参数的整定过程如图3所示,根据工程上常用的试凑法,先整定内部的电流环,再依次整定速度环和位置环。
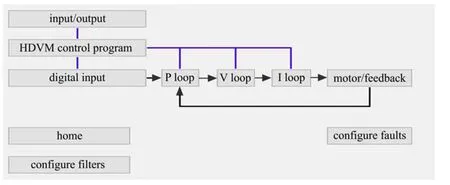
图3 PID参数整定过程图Fig.3 Diagram of PID parameter tuning process
依据驱动器手册及接口板的定义,脉冲接收引脚和方向设置引脚依次为IN7、IN8,在驱动器接口处设计74AHC14施密特触发器,外接10 kΩ的上拉电阻提升输入电压至+5 V。本次主控芯片是ST公司生产的STM32F103ZET6,其引脚设置为推挽输出时电流最大可达20 mA,但引脚输出电压不能满足驱动器引脚+5 V要求,故采用芯片74HCT245,将输出电压提高至+5 V,如图4所示。
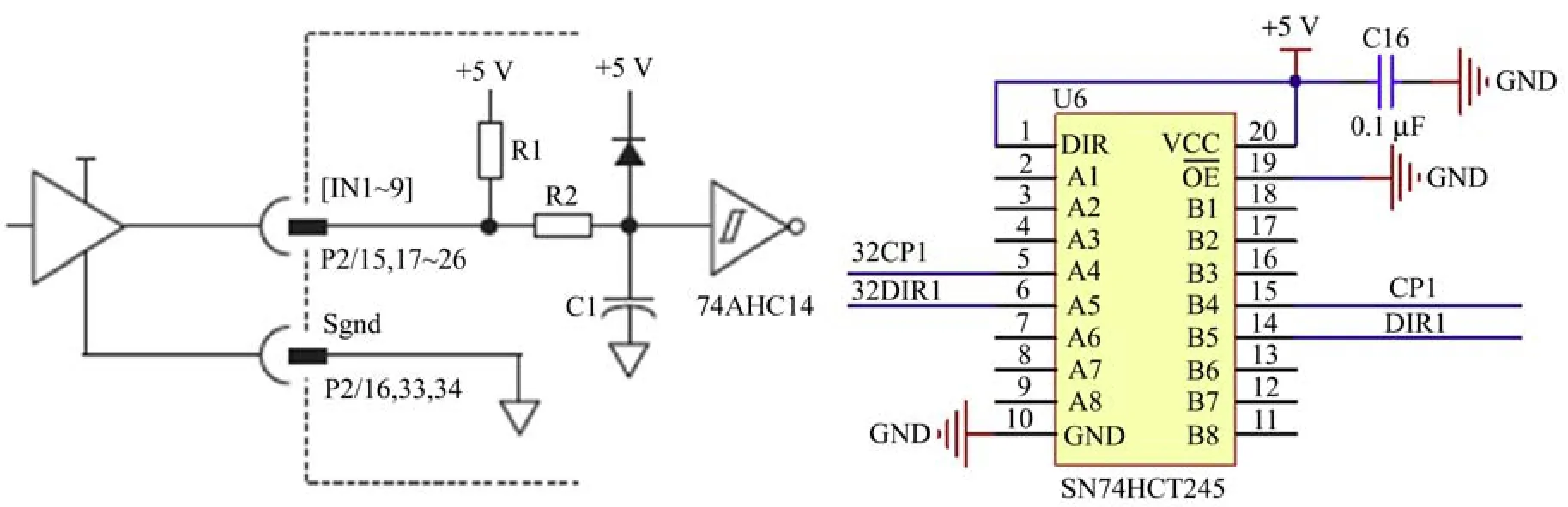
图4 驱动接口电路设计Fig.4 Design of driver interface circuit
32CP1、32DIR1连接到STM32的PA6与PA7引脚。PA6、PA7分别对应STM32定时器3的CH1、CH2。在软件上,需要给对应的脉冲口发送一定数量的脉冲。为使得脉冲发送的数量准确性高,采用主从定时器方式来发送PWM波,通过一个定时器触发另一个定时器,该方法的优点是控制精度高,不需要频繁进入中断而增加主控制器的负担。其中发出触发信号的定时器工作于主模式,接收触发信号而启动的定时器工作于从模式。本次采用TIM3为主模式,TIM1为从模式,程序上用TIM3设置频率,TIM1设置脉冲个数。
1.2.2 波长闭环控制
电机输出轴分辨率为240000 p/rev,可以计算出电机每接收到1个脉冲,旋转角度为θ1=360◦/240000=0.0015◦。参考光路的光路图如图5所示。
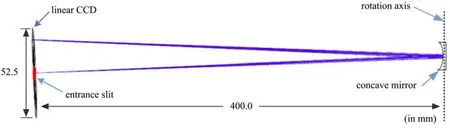
图5 参考光路图Fig.5 Diagram of reference optical path
CCD距离凹面镜的距离为400 mm,入射光经过凹面镜反射,设凹面镜反射角为θ2,由于凹面镜反射角是电机旋转角度的两倍,即θ2=2θ1=0.003◦,电机每接收一个脉冲,其光斑在CCD上的移动距离为

单位为µm。TCD1703C的像元尺寸为7µm,即电机接收一个脉冲,约等于CCD的3个像元宽度。由于电机的精度为150 arc sec,通过理论计算,该精度下电机每次定位所带来的最大偏差约为58µm,偏差较大,因此需要线阵CCD作为反馈实现波长闭环控制,控制框图如图6所示,其工作原理主要是比较两个位置的信息:一个是实时测量的CCD光斑的质心值,另一个是预先的设定值,计算两者的偏差并转换为脉冲,驱动电机进行调整,达到闭环控制的效果。
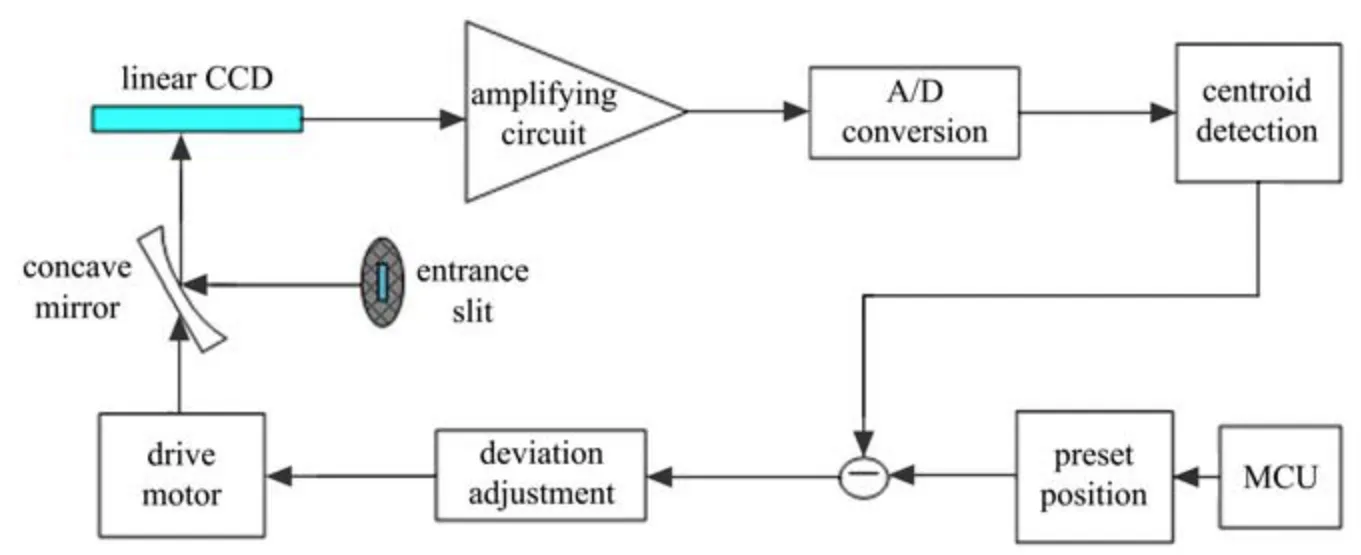
图6 波长校准闭环反馈控制Fig.6 Closed-loop feedback control of wavelength calibration
1.3 线阵CCD信号采集与质心检测
CCD的信号采集系统主要由线阵CCD、控制电路和信号处理电路组成[6]。系统设计框图如图7所示,工作过程如下:ARM处理器产生驱动脉冲,通过电平转换之后驱动线阵CCD工作,线阵CCD的光敏单元受光的激发产生电信号,在驱动信号的作用下输出离散的模拟信号,将此信号经过处理后进行A/D转换,同时每接收完一帧CCD的数据,计算出质心位置,并通过上位机进行显示。
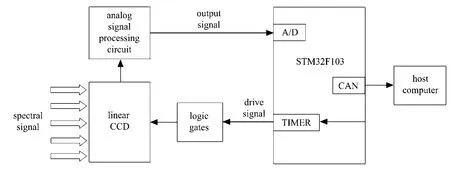
图7 CCD信号采集系统Fig.7 Signal acquisition system of CCD
1.3.1 线阵CCD驱动设计
目前市面上光学传感器主要是CCD与CMOS两种。与CMOS传感器相比,CCD的优势在于灵敏度高、分辨率高以及噪声小,但缺点在于功耗以及成本较高。由于高灵敏度以及分辨率可以提高定位精度,因此CCD更符合需求。通过调研和筛选,最终选用东芝生产的TCD1703C线性探测器,它是一种高灵敏度、低暗电流的图像传感器[7],具有7500个光敏单元,由7650个PN结光电二极管构成光敏单元阵列,其中前128个和后16个用作暗电流检测,中间的7500个像元为有效光敏单元,每个有效光敏单元长度为7µm,感光阵列长度为52.5 mm。
图8是CCD的时序图,常用的CCD驱动方法主要有直接数字电路驱动、可编程逻辑驱动以及微处理器软件驱动等,其中直接数字电路驱动和可编程逻辑驱动的成本较高,需要与不同主控芯片进行转换,集成度不高且体积较大。随着微处理器技术的飞速发展,其性能也得到了提升,通过延时指令、定时中断等软件方式,经过I/O口即可获得CCD的驱动信号,这种方法灵活性好,电路集成度与可靠性高,控制方便,可移植性好。本设计采用ARM芯片STM31F103ZET6完成CCD的驱动工作。具体的时序分析如下:SH由PA15设置高低电平,ø1E输出占空比为0.5的PWM波,ø2E、ø2B与ø1E的信号相反,可以通过反相器SN74LVC3G04取反得到。RS和CP分别由定时器8的Channel1、Channel2、Channel3、Channel4产生。由CCD驱动时序图可以看出,在一个信号周期内RS和CP信号要先上升后下降,也就是需要在一个周期内产生低-高-低电平,而STM32定时器在一个周期内只能产生高-低电平或者低-高电平[8]。因此设计用定时器的两个通道输出两个有相位差的高-低电平,经过异或门SN74LVC2G86来生成所需信号。设置TIM8工作在PWM1模式,自动重装载值为71,4个通道比较值分别为36、42、46、52,其中RS由Channel1与Channel2经过异或门得到,CP由Channel3与Channel4经过异或门得到。A/D转换触发时序通过TIM5−Channel1产生,与CCD的输出信号同步。STM32定时器产生PWM波,由Keil软件内部集成的logic analyzer进行仿真,如图9所示。
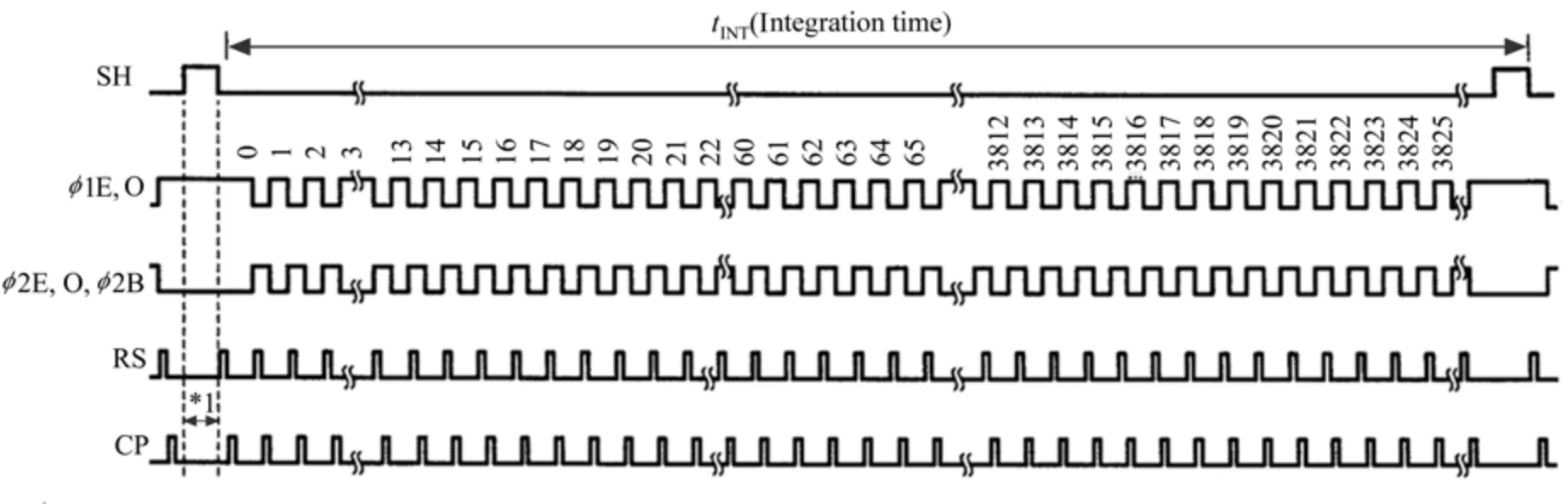
图8 TCD 1703C的时序图Fig.8 Thetiming chart of TCD1703C
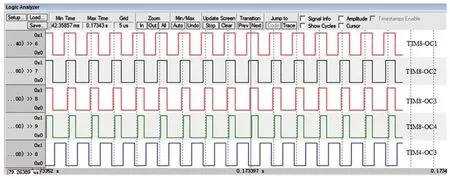
图9定时器产生的PWM波形仿真图Fig.9 Simulation diagram of PWM wave generated by timer
1.3.2 信号处理与采集
CCD驱动时序提供到TCD1703C中,可以输出正确的信号。为了更好地完成阻抗匹配,选择放大器TL072来实现信号的输入阻抗匹配以及信号放大。TL072是一款具有低功耗、高输入阻抗以及低噪声的运算放大器,适合高保真和音频前置放大器应用。电路设计如图10所示,数模转换工作采用STM32
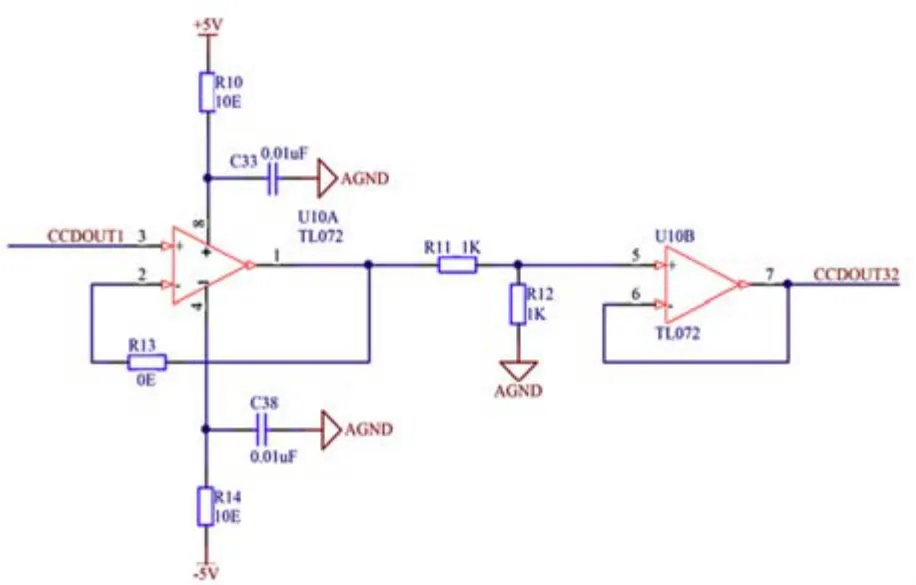
图10 输出信号预处理电路Fig.10 Preprocessing circuit of output signal
内部12位高速ADC完成,其采样频率可以达到MHz,满足要求的同时简化了电路设计。在进行探测器数模转换时,将A/D转换引脚与外部引脚连接,并在A/D触发时序的下降沿时触发外部中断,在中断处理函数中启动A/D转换,得到数字信号。A/D转换触发信号与CCD输出信号如图11所示,其中SIGN是CCD输出信号,AD是转换触发信号。
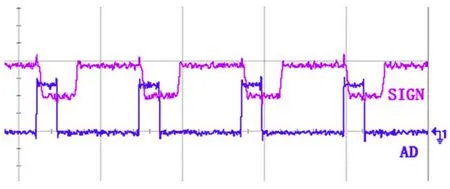
图11 A/D触发信号和输出信号Fig.11 A/D trigger signal and output signal
1.3.3 光斑质心位置检测
为了获得狭缝光斑成像对应的准确像元序号,需要对获取的光斑进行中心位置计算,即质心检测。常用的光斑中心算法有最大值法、截止电压法、重心法、高斯拟合法等,考虑本实验光斑灰度值大,选用重心法最为简单有效[9]。由于通常光斑在中心处亮度较高,为更准确找到质心的同时减少计算过程,采用带窗口的重心法,上位机接收的信号如图12所示。
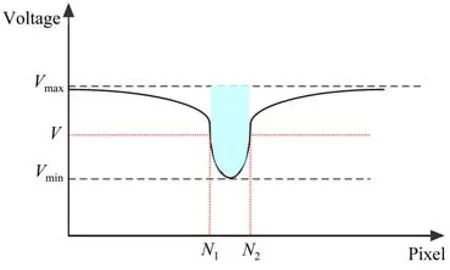
图12 上位机接收波形Fig.12 Receiving waveform of upper computer
带窗口重心法的具体处理过程如下:1)找到光斑位置对应的电压最小值Vmin;2)截止电压V=k1Vmax+k2Vmin,取k1=k2=0.5,得到截止信号N1、N2,构建窗口[N1,N2];3)针对窗口内的光斑,使用重心法计算光斑位置,计算公式可表示为

式中:X表示光斑质心位置;xi为第i个像元位置;f(xi)是第i个像元的灰度值。
1.4 闭环控制流程
实际调试扫描机构定位精度,通过界面显示,在较短旋转时间的情况下,精度可以达到预设点左右2个像元宽度。闭环反馈控制程序流程图如图13,设计程序执行过程如下:1)程序初始化(TIMER、ADC、CAN),电机使能;2)判断当前CCD的质心位置与设定位置大小,由此让电机正转或反转到达对应位置;3)利用CCD采集,计算电机旋转后光斑在CCD上的质心位置,若质心位置与设定值的偏差小于2个像元宽度,则达到预期,单元探测器测量该对应位置的色散光谱辐射;若偏差超出2个像元宽度,反馈控制电机旋转,直至达到预期位置,完成对应位置的光谱辐射测量。
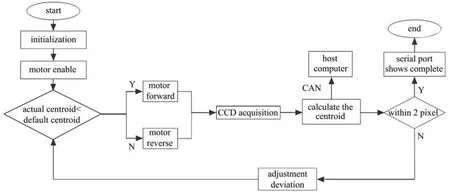
图13 闭环反馈控制程序流程图Fig.13 Flow chart of closed loop feedback control program
程序上设置预设质心为0x060A,对应十进制在1546像元序号,若对应2个像元宽度偏差,则实际质心应该在0x0608∼0x060C,对应十进制是1544∼1548,如图14所示,像元序号随电机转动调整,最终像元序号为1547,满足要求。
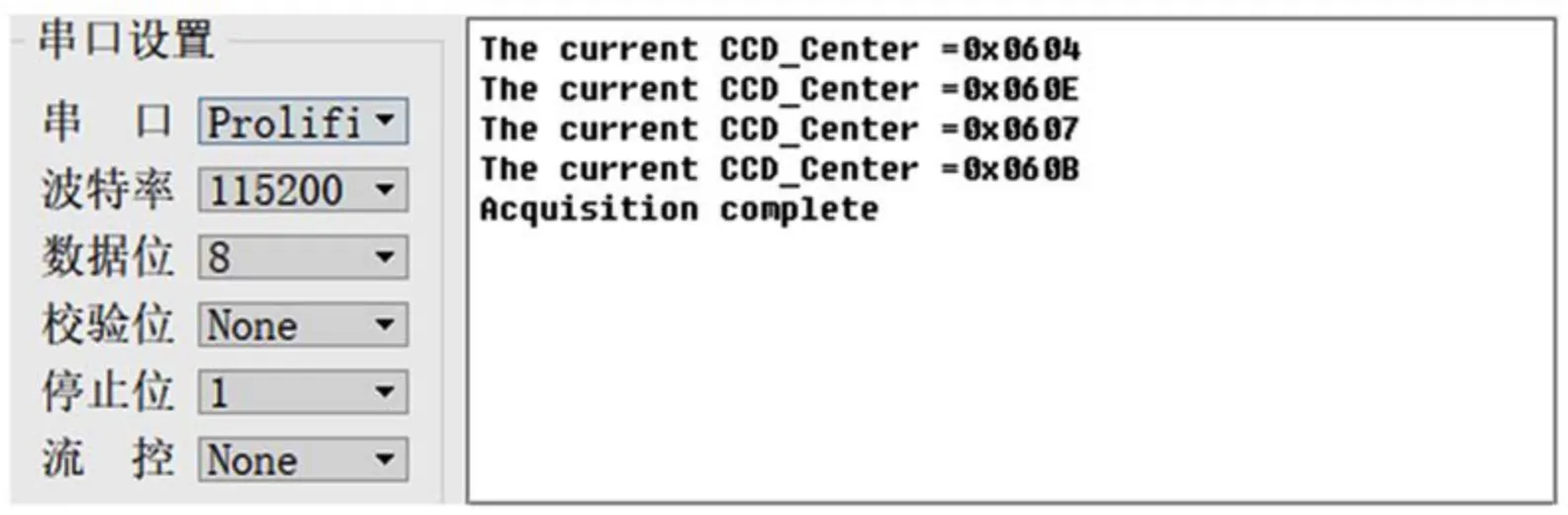
图14 调试显示质心位置Fig.14 Debugging shows the position of centroid diagram
2 性能测试
2.1 光斑质心位置重复性测试
为了使闭环控制精度满足需求,需要根据线阵CCD上的光斑位置计算质心,调整电机旋转角度,从而达到闭环反馈控制的效果。重复性是指在相同测量条件下,对相同试样连续进行多次测量后所得结果之间的一致性。重复性精度高可以减少因随机性带来的误差,确保测量数据的准确性[10]。在同一位置下对CCD光斑质心位置进行重复性测试,测试结果如图15所示。
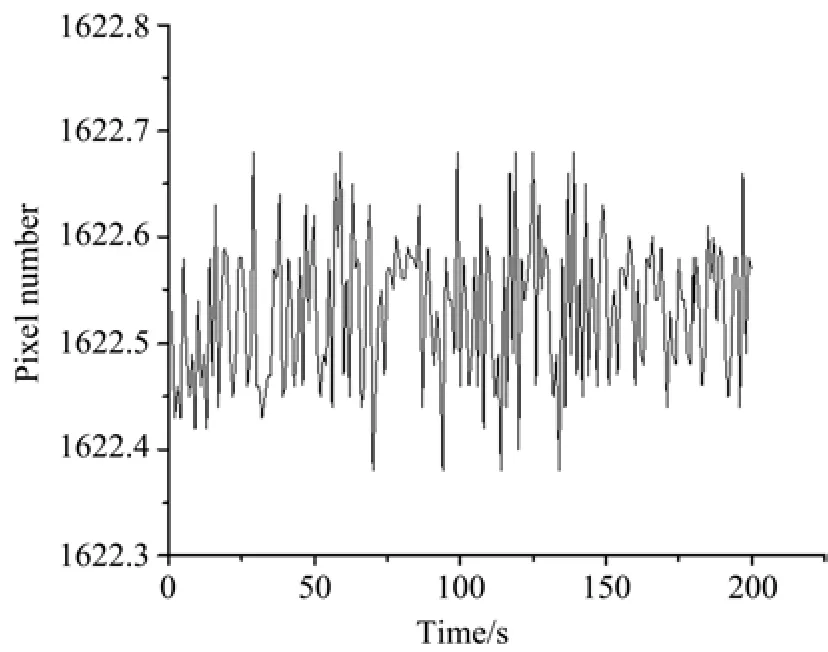
图15 CCD光斑质心位置重复性测试Fig.15 Repeatability test of CCD spot centroid position
根据测试结果计算其位置平均值为1622.53、最大值为1622.68、最小值为1622.38、标准差为0.0693,由此表明CCD像斑的质心位置多次测试时变化较小,保证了测量结果的准确性。
2.2 波长扫描精度与稳定性测试
波长定位扫描结构需要满足精度与稳定性的要求。根据仪器的应用需求,仪器的波长精度需要优于1 nm。为此在闭环反馈控制下,测试了波长扫描机构长时间运行的稳定性和精度,根据测试结果进行闭环控制,得到系统性能指标。测试结果如图16所示,设定闭环反馈控制质心预设位置在1000像元,系统运行时间为30 min。
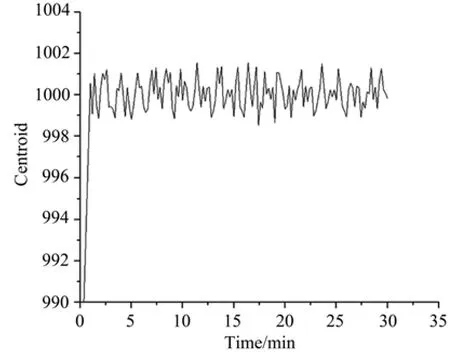
图16 系统稳定性测试Fig.16 Stability test of thesystem
2.2.1 波长扫描精度
光学元件棱镜色散后的长度为34 mm,对应波长范围是380∼2500 nm,由于棱镜色散的非线性,在1200 nm波长处的光谱分辨率最低,300µm狭缝对应的光谱带宽小于40 nm,CCD像元宽度(7µm)对应的光谱带宽小于1 nm。CCD像元质心位置精度达到亚像元宽度,根据CCD质心位置确定波长精度优于0.1 nm。
2.2.2 波长扫描重复性
通过测试数据,得到多次闭环控制后CCD的像元序号,其最大为1001.56、最小为998.52、平均像元序号为1000.25、标准差为0.74像元宽度,取多次扫描的标准差作为波长扫描重复性误差。根据结果,波长扫描重复性误差小于0.74 nm。
2.2.3 闭环系统的技术指标分析
衡量闭环系统的技术指标包括稳定性、暂态性能和稳态误差。在本系统中,将闭环系统进行长时间的测试,从测试的结果可以看出稳定性较好。暂态性能主要是描述系统的调节时间、峰值时间和上升时间等参数,由于在本系统中,电机每次转到特定位置,其暂态系统参数均不相同。闭环控制的过程主要是为了找到设定位置点左右14µm的位置,当达到这个位置范围内,电机停止运动,至此一个点的闭环控制过程完成。系统最终达到的闭环精度为2个像元宽度,可视为稳态误差,即稳态误差ess≤14µm。
3 结论
设计了基于小型交流伺服电机的精密扫描定位装置。结合扫描定位的参数需求,选取小型交流伺服电机作为扫描机构的驱动,同时利用入射狭缝、线阵CCD和凹面反射镜建立参考光路,用于反馈电机实际的旋转角度并与预设位置比较,从而进行偏差调整,实现扫描装置的精确定位。针对线阵CCD的质心位置检测进行了重复性测试,计算出标准偏差为0.0693,像元漂移不超过0.3个像元宽度,保证了CCD质心位置检测的可靠性。此外,对扫描定位装置的闭环控制也进行了测试,得到长时间运行的定位偏差在预设点左右2个像元宽度以内,验证了其稳定性,实现了扫描定位的微米级高精度设计需求。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
微特电机(2020年11期)2020-12-30
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
电子制作(2018年17期)2018-09-28
电子制作(2018年11期)2018-08-04
通信电源技术(2018年3期)2018-06-26
电子制作(2016年1期)2016-11-07
电脑知识与技术(2016年18期)2016-11-02