
基于压电陶瓷传感器的先导式溢流阀性能研究
2022-08-23 01:42孟利民王小军
机械工程与自动化 2022年4期
满 辉,孟利民,王小军
(安徽理工大学 机械工程学院,安徽 淮南 232001)
0 引言
溢流阀作为现代液压设备中的主要液压控制元件,其主要作用是对液压系统定压或进行安全保护,在流体传动与控制中有着广泛的应用[1]。传统的先导阀结构主要包括阀体、阀芯、弹簧以及调压螺母等,工作时,当调定压力达到了先导阀的开启压力时,液压力作用于先导阀的前端,克服弹簧的预紧力,从而将先导阀打开,造成主阀阀芯上、下压力不同,在压力差的作用下,主阀芯动作,实现压力控制功能。随着液压技术在现代机械工业领域的广泛应用,对于适用于高压、超高压液压系统的压力控制阀有了越来越高的要求。
由于传统先导阀的结构与工作原理的限制,使其调定的最高压力有限,动作存在滞后性,不能完全满足高压系统对液压控制阀反应灵敏性、动作准确性和可靠性的要求。近年来,对溢流阀的理论研究主要集中于结构参数设计和负载特性方面,如刘坤华等[2]、杜宏辰等[3]、周加永等[4]对溢流阀进行了参数设计和动、静态性能方面的分析研究。在液压故障诊断方面,主要利用AMESim对溢流阀进行故障诊断分析及检测方法研究,如侯艳艳等[5]利用AMESim平台开展了溢流阀故障诊断及预测研究工作。
以上的研究工作对于溢流阀的研究与应用有着重要的借签价值,但并没有解决先导式溢流阀在高压系统中应用时的动作延迟、滞后问题。为提升先导式溢流阀动作灵敏可靠性,本文运用压电陶瓷传感器和二位三通电磁换向阀设计了一种新型简洁紧凑的先导式溢流阀,并利用AMESim平台对该阀的工作特性开展仿真研究。
1 基于压电陶瓷传感器的先导式溢流阀结构与工作原理
1.1 先导式溢流阀的结构模型
基于压电陶瓷传感器的先导式溢流阀(新型先导式溢流阀)主要由二位三通电磁换向阀、压电陶瓷传感器控制模块和主阀三部分组成,其结构如图1所示。工作时,传感器受到压力油液作用,将压力信号转换为电信号,经过调理电路将电信号放大并转换为适合AD量程的信号送入AD转换器进行数模转换,单片机读取AD转换的结果并与给定的阈值信号比较,当小于阈值信号时,则单片机无控制命令发给电磁控制阀,电磁控制阀的线圈不带电,电磁阀衔铁不动,此时二位三通换向阀阀芯不动,挡住了油口,油口与油箱不通,主阀芯上下两端面压力相等,在较软的主阀弹簧作用下主阀芯处于最下端位置,溢流阀阀口P和T隔断,没有溢流;当大于阈值信号时,则单片机发出控制命令给电磁控制阀,电磁控制阀的线圈带电,电磁阀衔铁向右移动,从而推动二位三通换向阀阀芯向右移动,导阀打开,压力油就可以流回油箱,由于阻尼孔的作用,使主阀芯上端的液压力小于下端压力,主阀芯在压差的作用下上移,打开阀口,实现溢流,并维持压力基本稳定;当阀内的液压小于调定压力时,AD转换的结果再次小于阈值信号,单片机无控制命令发给电磁控制阀,线圈失电,阀芯在复位弹簧的作用下回到初始位置,油口与油箱不通。
1.2 先导式溢流阀的数学模型
基于压电陶瓷传感器的先导式溢流阀原理图如图2所示。
(1) 主阀芯受力平衡方程为:
p1A1-p2A2=Md2ydt2+fydydt+Ky(y0+y)+C1πDsin2α.
(1)
其中:p1为主阀进口处压力;A1为主阀芯下腔受力面积;p2为主阀芯上腔压力;A2主阀芯上腔受力面积;M为主阀芯当量质量,为阀芯质量加主阀弹簧质量的1/3;y为主阀阀芯位移,阀口开启方向为正方向;fy为主阀阀芯运动黏性阻尼系数;Ky为主阀弹簧刚度;y0为主阀预压缩量;C1为主阀口流量系数;D为主阀座孔直径;α为主阀芯半锥角。
(2) 主阀开启时阀口的流量压力方程为:
Q1=C1πDysinα2ρp1.
(2)
其中:ρ为液压油密度。
(3) 溢流阀节流孔流量方程为:
Q=Cda02ρ(Δp).
(3)
其中:Cd为节流孔流量系数;a0为节流孔端面面积;Δp为降压。

1-电磁阀端盖;2-电磁阀复位弹簧;3-电磁衔铁;4-电磁线圈;5-压电陶瓷压力传感器模块;6-换向阀体;7-换向阀阀芯;8-换向阀复位弹簧;9-密封螺塞;10-主阀弹簧座;11-主阀芯弹簧;12-主阀芯;13-主阀移动阀芯;14-主阀体;15-控制口(K口);16-主阀阻尼孔;17-导阀节流孔;18-电磁盒体图1 基于压电陶瓷传感器的先导式溢流阀结构
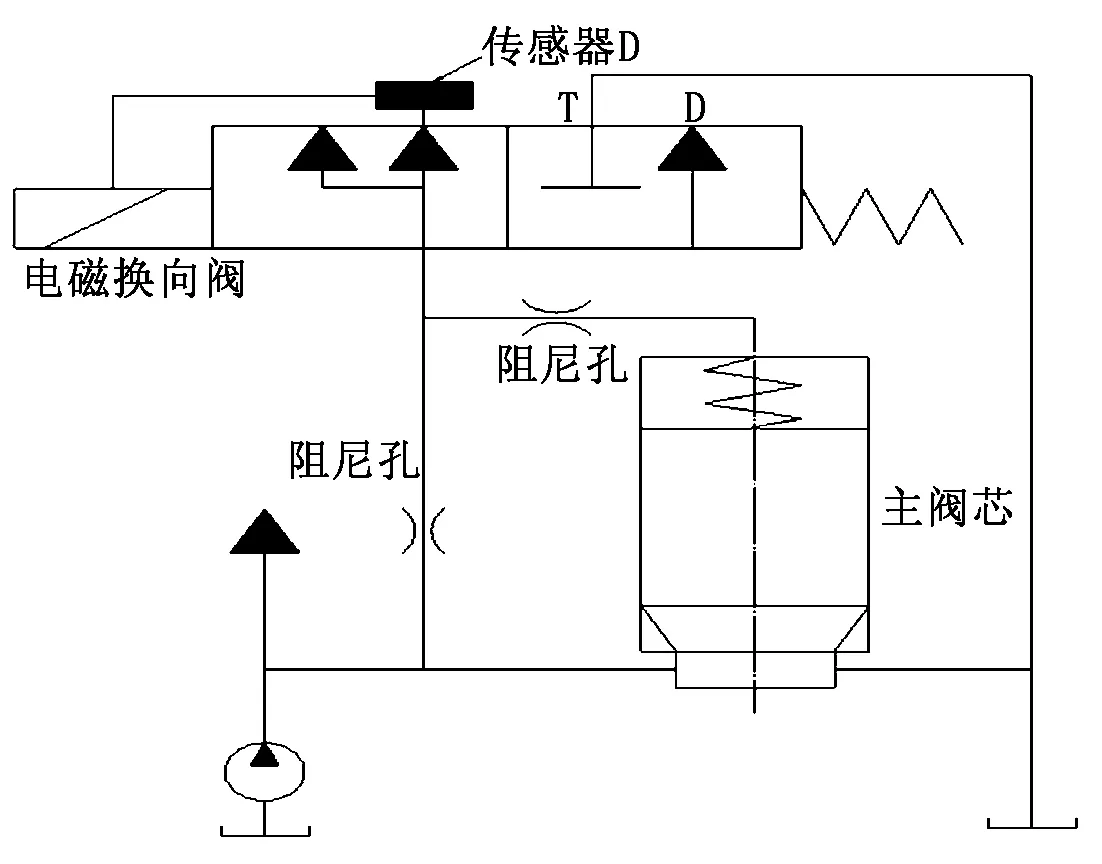
图2 基于压电陶瓷传感器的先导式溢流阀原理图
2 先导式溢流阀仿真分析
2.1 建立先导式溢流阀仿真模型
AMESim 采用基于物理模型的图形化建模方式,为用户提供了可以直接使用的丰富的元件应用库,不需要进行繁琐的数学建模,使用户专注于物理系统本身的设计。目前,AMESim已经成为包括流体、机械、热分析、电气、电磁以及控制等复杂建模和仿真的优选平台。
根据基于压电陶瓷传感器的先导式溢流阀结构和工作原理,在AMESim中运用Hydraulic Component Design库的基本元件搭建其仿真模型,如图3所示。
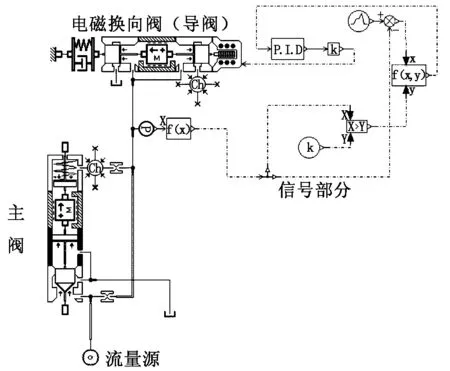
图3 基于压电陶瓷传感器的先导式溢流阀AMESim模型
2.2 设置仿真参数
参数设置是AMESim建模的重要环节,该先导式溢流阀的主要仿真参数设置如表1所示,表1中没有列出的元件参数保持默认。因测量过程中有不可避免的误差出现,且仿真研究简化了模型,可能会忽略一些次要因素,所以仿真结果和实际情况可能会出现偏差,只要在允许误差范围内即可。
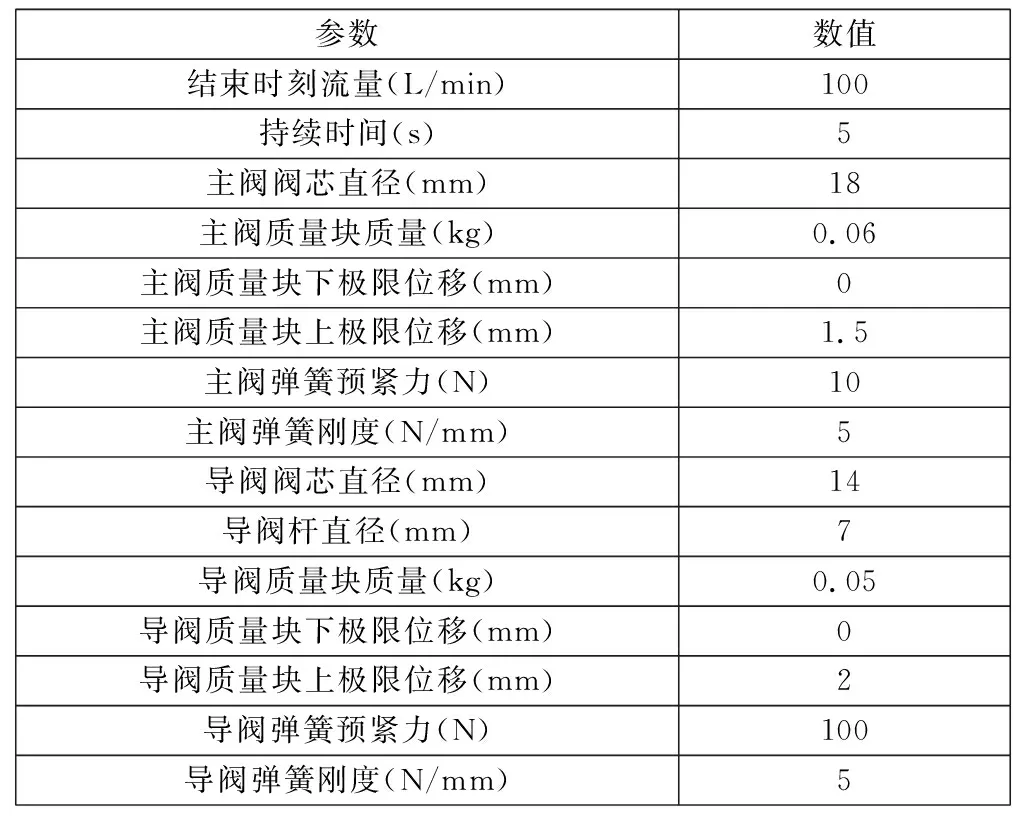
表1 先导式溢流阀的主要仿真参数设置
3 仿真结果与分析
先导式溢流阀的主要特性分为静态特性和动态特性,采用如图3所示的新型先导式溢流阀的AMESim模型和如表1所示的溢流阀参数设置,分别对基于压电陶瓷传感器的先导式溢流阀和传统先导式溢流阀的静态性能、动态性能进行分析比较,结果如图4~图6所示。
启闭特性是衡量溢流阀定压精度的一个重要指标。新型溢流阀的开启比为:
K1=(pK1/pS)×100%.
(4)
其中:pK1为新型溢流阀开启压力;pS为溢流阀调定压力。
新型溢流阀闭合比为:
B1=(pB1/pS)×100%.
(5)
其中:pB1为新型溢流阀闭合压力。
传统溢流阀的开启比为:
K2=(pK2/pS)×100%.
(6)
其中:pK2为传统溢流阀开启压力。
传统溢流阀闭合比为:
B2=(pB2/pS)×100%.
(7)
其中:pB2为传统溢流阀闭合压力。
由图4可以得到pK1=28.07 MPa,pB1=27.55 MPa,pK2=27.99 MPa,pB2=26.37 MPa,pS=32 MPa。将数值代入式(4)~式(7)计算得:K1=87.71%,B1=86.09%,K2=87.44%,B2=82.41%。
可以看出,新型先导式溢流阀的开启比和闭合比更接近,其启闭特性好,优于同等条件下的传统先导式溢流阀。其主要原因为新型先导式溢流阀的导阀感受到压力,转换为电信号,使导阀动作,从而导致主阀动作;而传统先导式溢流阀主要靠机械机构使导阀动作,从而控制主阀动作。
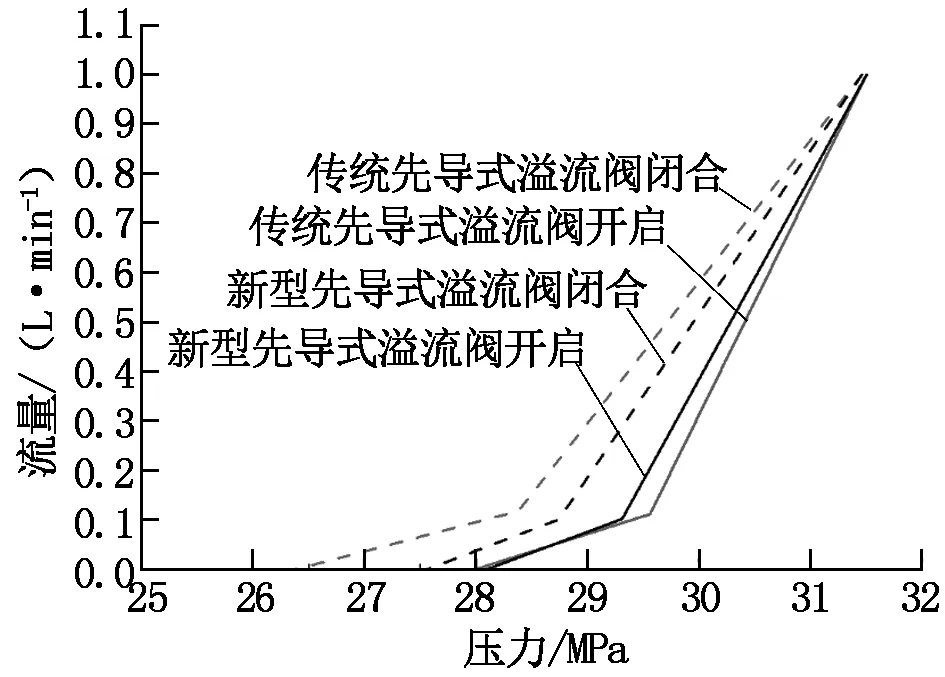
图4 溢流阀启闭特性曲线
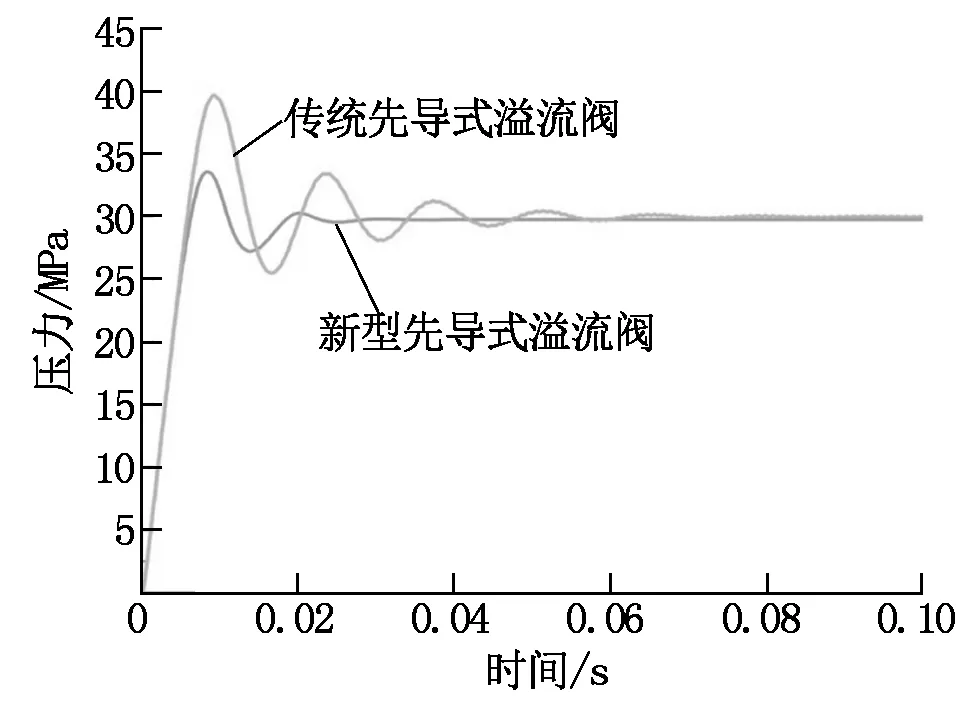
图5 溢流阀动态响应曲线
由图5可以看出:两种溢流阀达到稳态时压力都稳定在30.00 MPa左右,基于压电陶瓷传感器的先导式溢流阀比传统溢流阀早0.045 s达到稳压,并且其波动幅度小于传统先导式溢流阀。
由图6可以看出:新型先导式溢流阀主阀和导阀稳态输入压力分别为29.71 MPa和18.03 MPa,压力阶跃响应上升时间约为0.008 3 s,过渡时间约为0.034 7 s,压力超调率为12.5%;传统先导式溢流阀主阀和导阀稳态输入压力分别为29.92 MPa和18.25 MPa,压力阶跃响应上升时间约为0.009 2 s,过渡时间约为0.079 9 s,压力超调率为32%。由此可以看出:与传统先导式溢流阀相比,该新型先导式溢流阀响应时间少,响应速度快,过渡时间短,系统震荡少,超调率小,动态稳压误差小。

图6 溢流阀压力阶跃响应曲线
4 结语
本文介绍了一种基于压电陶瓷传感器的先导式溢流阀,其在传统的先导式溢流阀的基础上运用了压电陶瓷传感器,并以二位三通电磁换向阀代替传统的先导机构。利用AMESim仿真软件搭建了该先导式溢流阀的模型,得到阀的启闭特性曲线、压力响应特性曲线,并与传统的先导式溢流阀进行比较。仿真结果表明:基于压电陶瓷传感器的先导式溢流阀的启闭特性优于传统先导式溢流阀,动态响应比传统的先导式溢流阀快0.045 s,超调率优于传统先导式溢流阀。
猜你喜欢
仪表技术与传感器(2022年4期)2022-05-31
陶瓷学报(2021年4期)2021-10-14
陶瓷学报(2021年3期)2021-07-22
陶瓷学报(2020年6期)2021-01-26
水电站机电技术(2020年3期)2020-04-28
导弹与航天运载技术(2018年1期)2018-03-21
中国科技纵横(2016年14期)2016-10-10
电子制作(2016年19期)2016-08-24
筑路机械与施工机械化(2015年1期)2015-09-18
筑路机械与施工机械化(2014年2期)2014-03-01
