
智能堆码起重机器人电控系统的设计
2022-08-23 01:42毛怡琳张凤涛陈垲格王铃凯
机械工程与自动化 2022年4期
毛怡琳,张凤涛,王 菁,陈垲格,王铃凯
(长春师范大学 工程学院,吉林 长春 130032)
0 引言
为实现“工业4.0”和“中国制造2025”,越来越多的产业开启了信息化和工业化两化深度融合,以加快智能工厂在工业行业领域的应用。智能工厂是实现智能制造的重要载体,不同行业建设的智能工厂的重点内容、发展模式和突破环节各有不同[1]。为探求智能起重机在智能工厂上的应用,设计研发了基于机器视觉技术的智能堆码起重机器人,本文主要对智能堆码起重机器人电控系统进行了设计。
1 智能堆码起重机器人电控系统总体设计
该智能堆码起重机器人可完成箱装牛奶的分类、抓取、搬运和码垛等工作。采用门形结构设计可保证机器人提起重物后行走时重心平稳,通过视觉传感器完成箱装牛奶的类型识别及搬运路径的自主规划,采用前后双臂升降机结构设计使得机器人每次可提起两箱牛奶,减少往返行走次数,提高了机器人的工作效率。更加轻量化的设计使得机器人体型不断缩小,从而节省原材料,对动力的需求也就更少,更加低碳环保[2]。
为满足以上要求,设计了该智能堆码起重机器人电控系统整体方案,如图1所示。
2 智能堆码起重机器人重要组成部分电路设计
2.1 控制器的选取
根据整体设计方案,该控制系统共需要45个IO,其中包括4个PWM、4个外部中断、2个UART、1个定时器等资源,其余为基本IO功能,因此在选择控制器时,单片机51系列没有找到适合的CPU,纵观Arduino系列最适合的只有Arduino MEGA2560单片机。因此Arduino控制器选择了Arduino MEGA2560开发版为控制核心。
2.2 起重装置电路设计
起重装置是该机器人最重要的组成部分,它能够完成对箱装牛奶的抓取、提起、下放、松开等一系列动作。为提高工作效率,采用前后双臂升降机结构设计方案。机器人首先移动到货物的正上方,升降电机开始下放升降杆直到垂直限位被触发;然后,水平方向的步进电机反向旋转直到水平限位被触发,此时系统处于复位状态;步进电机正转使抓手垂直伸入拎手的内部,当抓手伸入到指定位置时,反射式光电开关被触发输出低电平给单片机,使单片机感知该反馈信息,步进电机停止,同时启动升降电机将物体向上提起,单片机通过对光栅产生脉冲计数,并实时计算上升高度,将物体准确运送到指定高度后停止,这样就完成了货物抓取和起重过程。下放和松开动作与上述流程正好相反。

图1 智能堆码起重机器人电控系统整体设计方案
当两套升降装置的升降杆位于底部,将触发垂直限位开关1和2,表示竖直运动初始位置。升降杆上升过程中光栅得到连续脉冲触发,CPU根据脉冲数量可实时计算上升高度(位置信息),从而形成闭环反馈。光栅检测电路如图2所示。
当机械手水平移动到最左端,将触发水平限位开关1和2,表示水平运动的初始位置。由于步进电机运行的步数与位移成正比,可通过程序实时计算水平位移(位置信息)。
当机械手钩住货物的提手后,抓取反馈传感器将输出低电平,表示抓取成功。抓取反馈电路结构同光栅检测电路,只不过光栅检测使用遮挡方式,而抓取反馈使用反射方式。
升降电机采用DC12 V、10 r/min的减速电机控制,共2个,需要1片L298P进行驱动,如图3所示。平移电机采用DC12 V、步距角1.8°的步进电机,共2个,需要2片A4988芯片控制,如图4所示。

图2 光栅检测电路

图3 直流电机控制电路

图4 步进电机控制电路
2.3 机器人底盘控制电路设计
该装置对于平稳性、灵活性有一定要求,在设计控制电路时,选择了4个直流减速电机连接4个麦克纳姆轮作为机器人底盘。麦克纳姆轮也称为全向轮,四驱方式可方便实现前后、左右、斜45°等8个方向的平移以及原地旋转等动作。
虽然该装置的灵活度有一定保证,但当负载较重或分配不均时,四驱车走直线需要程序不断矫正,因此选择DC12 V、330 r/min、减速比为1∶16的直流减速电机,每个电机自带2路编码器,可作为速度和方向反馈,利用PID算法使得每个电机能够做到恒速控制,这样可保证机器人直线运动偏差较小。
同时每片L298P可控制两个直流电机,每个电机需要2个IO控制方向、1个PWM控制转速;每个电机有2路编码器反馈,其中一个接外部中断,另一个接普通IO,配合内部定时器(5 ms左右)使用PID算法可完成每个电机的恒速控制。两路底盘电机的控制电路如图5所示。

图5 两路底盘电机控制电路
2.4 颜色及形状识别电路
颜色识别可以使用TCS230等模块完成,但没有方便有效的传感器能够准确快速识别圆形、方形、三角形等形状。因此该系统中使用了OpenMV4视觉传感器模块,通过Python语言编写算法程序,可同时完成颜色和形状的检测。由于OpenMV4上集成了一片STM32F7系列的单片机,可通过Uart与Arduino控制器通信,将检测信息传送回来。在机器人前进过程中,视觉传感器还可以检测地表特定颜色标识线,即承担寻迹传感器的角色。
2.5 显示电路设计
LCD12864是一款128列64行的点阵液晶显示屏,能够同时显示16列4行(即64个)字符数。若选择带字库的LCD12864模块,可最多显示8列4行(即32个)汉字数。有并行驱动和串行驱动两种方式可供选择,为节省控制器IO使用数量,本系统选择使用串行驱动方式,只需要3个IO接口,工作速度完全符合设计要求,其接口电路如图6所示。
液晶显示器的15引脚接GND表示串行方式,19、20引脚分别接VCC和GND,使得该液晶显示器的背光处于常亮状态,Arduino单片机的35、36、33端口分别控制LCD12864的RE、RW、EN实现串行显示。
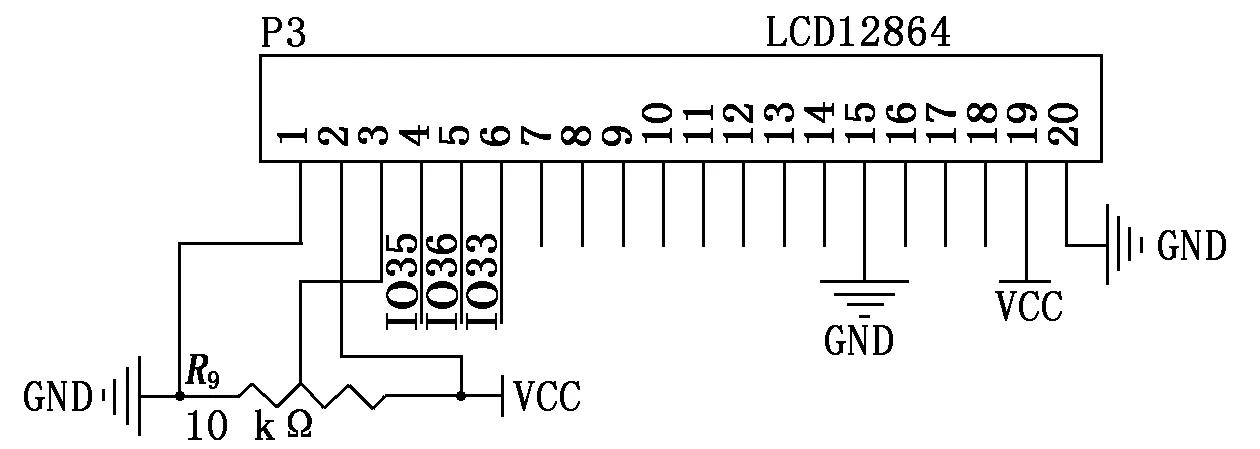
图6 LCD12864接口电路
3 工作原理分析
执行部分由4个直流减速电机连接4个麦克纳姆轮构成,对于空间相对较小的室内场景,基于麦克纳姆轮的移动机器人可以实现全方向无约束的运动,具有良好的机动性和灵活性[3],因此利用麦克纳姆轮全方位移动方式加上位于机轮周边轮轴的中心轮,使得起重机装置在运行时能够每一面都为正方向行驶而且能实现前后左右等8个方位的运动。
起重机从初始位置开始运行,首先通过OpenMV机器视觉模块进行检索,寻找需要装载的物体。确认货物后,该装置停靠在货物周边,控制核心控制卷扬机将起重装置下放;在起重机竖直底部留有起限位作用的行程开关,当起重装置到达竖直方向上最大运动距离后,底部垂直限位开关打开,此时起重装置在竖直方向上留有大于一个生产线上牛奶箱高度大小的空间,通过控制A4988芯片高低电平的输入使步进电机正反转,起重装置小范围运动;在取物装置处设有抓取反馈开关及水平限位开关,水平限位开关限制水平方向上的最大位移,抓取开关检测牛奶箱是否被有效抓取,若牛奶箱手柄未置于抓取装置上或者只有部分在抓取装置上,在此状态下的抓取反馈开关闭合;只有当水平垂直限位开关及抓取反馈开关同时打开时,OpenMV机器视觉模块才确认抓取,并将信息反馈给控制核心,光栅计数器辅助控制核心操控两个升降电机上升。
起重机在信息采集时启用OpenMV机器视觉模块,通过Python语言进行编程。OpenMV机器视觉模块通过自身算法,在运行过程中对货物进行识别和距离检测。OpenMV机器视觉模块还具有循迹功能,根据地面上铺设的轨迹路线,装置在指定场地中行进循迹。到达卸货位置后,卸货流程与起重流程类似。
4 结束语
从起重机械行业的增速来看,中国起重工业已经实现了产值和出口量的增加以及产品产量的提升,它们不仅颠覆了传统制造业的生产模式,也描绘了制造企业未来的发展前景,甚至正在催生新的经济价值。以工业驱动生产,以智能推动发展,部署先进的自动化技术和物联网技术,完成人工智能机器人在生产运输等环节的全面高效利用,将会成为现阶段企业转型和制造业发展的重要步骤。本文阐述的设计方案,将为其他轻小型起重机器人的机械结构设计以及控制系统的设计等提供参考。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
日用电器(2022年7期)2022-09-07
汽车实用技术(2022年16期)2022-08-31
中国交通信息化(2022年5期)2022-07-23
粮食加工(2021年5期)2021-11-01
哈尔滨轴承(2020年4期)2020-03-17
电子制作(2019年24期)2019-02-23
科技信息·中旬刊(2018年9期)2018-10-21
北方交通(2016年12期)2017-01-15
湖南大学学报·自然科学版(2014年3期)2014-12-30
