
散放稻草草方格铺设机器人的机构设计*
2022-09-01 07:34袁杰潮常同立张玉豪闫路诚李晗杰
机械制造 2022年6期
□ 袁杰潮 □ 常同立 □ 张玉豪 □ 闫路诚 □ 李晗杰 □ 左 晨
东北林业大学 机电工程学院 哈尔滨 150040
1 设计背景
防治沙漠化是一项长期重要的工作,世界各国都在研究防沙、治沙技术。在沙漠中铺设草方格进行固沙,是我国人民在长期治沙工作中总结出来的防风固沙技术,也是工程固沙法中被实践证明最为有效的一种方法[1]。在沙漠和沙地恶劣环境中人工铺设草方格,劳动量大,效率低,成本高,由机械代替人工铺设草方格,成为一种合理的选择。
目前,对于草方格铺设机器的研究,国内外都处于起步阶段。现有为数不多的草方格铺设机器普遍特点是比较笨重,不太适应复杂的沙漠地形,并且自动化程度较低。由此,草方格铺设机器尚未得到普及[2]。唐伟国[3]提出多连杆式并联横向插草装置,采用步进式插草作业。舒庆[4]设计了防风固沙草方格铺设机器人,并进行动力学分析,表明沙漠环境中阻力较大,沙的流动性较大。陆怀民等[5]对防风固沙草方格铺设机器人的沙漠通过性进行研究,采用预先编织成卷的草帘进行插草作业,作业繁重。司凯[6]设计了立体固沙车,进行纵向和横向插草作业,确认采用散状麦草进行插草较为困难,在作业时机构会经常被稻草缠绕。李跃娟[7]通过研究表明,目前草方格插草机构的设计难点是横向插草机构的设计。笔者设计了具有创新性的散放稻草草方格铺设机器人,体积小,实用性强,草方格铺设效率高,适应沙漠行走。
2 总体结构
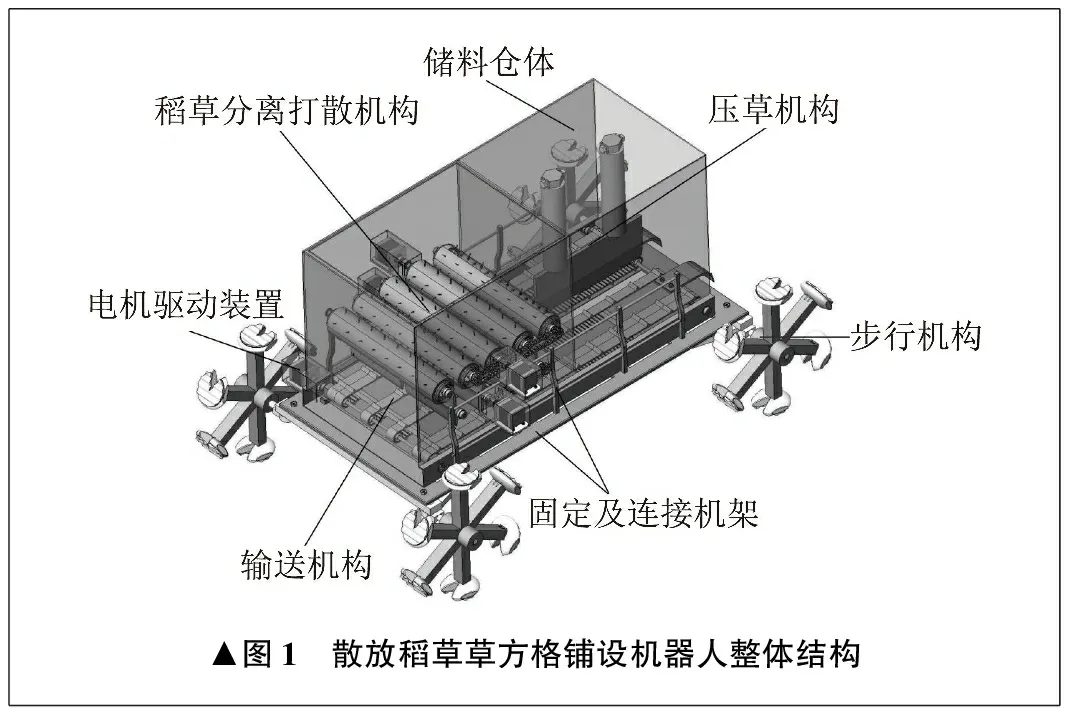
散放稻草草方格铺设机器人的整体结构如图1所示,主要由储料仓体、稻草分离打散机构、输送机构、压草机构、步行机构、电机驱动装置、固定及连接机架等组成。
储料仓体是依据散放稻草草方格铺设机器人总体布置设计的一个箱体,设置于散放稻草草方格铺设机器人的上部。储料仓体上部开有进料口,下部设有出料口。储料仓体内有稻草分离打散机构,主要由打散滚筒、布草摆板组成。打散滚筒横置于储料仓体内中下部,布草摆板横置于储料仓体底部出料口上方,位于打散滚筒下方。输送机构一部分设置于储料仓体出料口下方,另一部分设置于压草机构下方。压草机构位于输送机构上方、储料仓体后部。步行机构位于散放稻草草方格铺设机器人的下部。电机驱动装置为各组成部分的运动与控制提供动力。
3 草方格铺设工作原理
将散放的稻草原料从储料仓体进料口投入,稻草分离打散机构对稻草原料进行处理。打散滚筒拨散稻草原料,布草摆板将拨散后的稻草原料撒布在输送机构上,输送机构将稻草拨送至压草机构正下方,压草机构进行压草,将输送带上的稻草原料压入沙土一定深度。步行机构每转一个步距对应1/6圆周,压草机构压草一次,实现草方格机械化铺设。
依据实际沙地草方格铺设工艺要求,采用1 m×1 m的正方形草方格,治沙效果最好。草方格需要露出沙地的高度为10~20 cm,沙中稻草的深度为15~25 cm[8]。
4 稻草分离打散机构
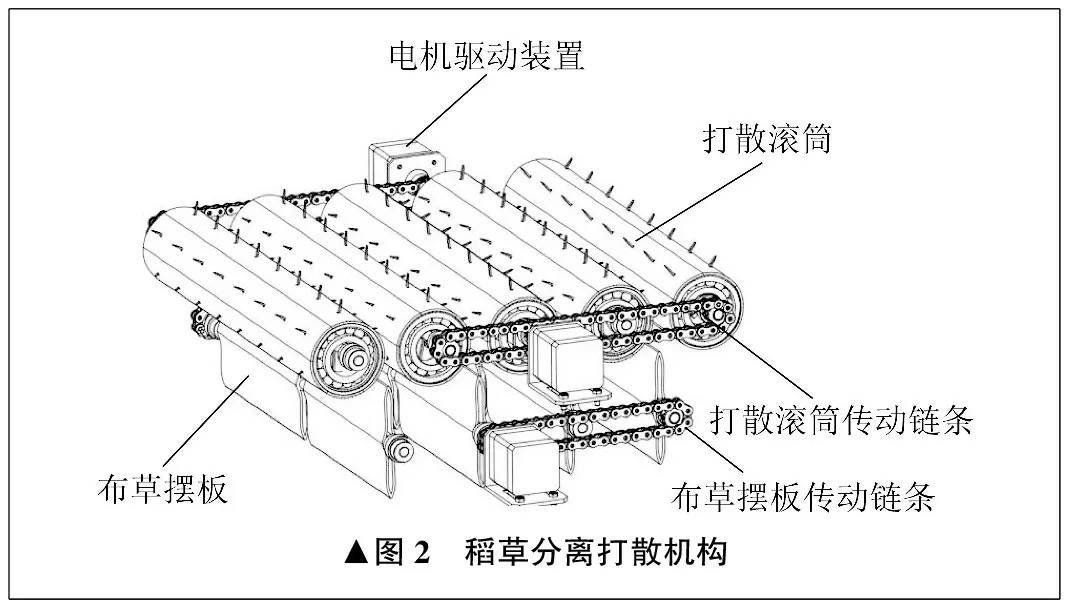
对于散放稻草草方格铺设机器人,稻草原料的分离打散处理是关键,对此设计了稻草分离打散机构。稻草分离打散机构主要由五个特殊结构的打散滚筒和四组布草摆板排列组成,如图2所示。
4.1 打散滚筒
打散滚筒如图3所示,由中心传动轴、分料杆、活动铰链、外滚动轴承、筒壁滚动轴承、轴承挡圈、筒壁、传动链轮组成。分料杆包括一根主动分料杆和五根从动分料杆。
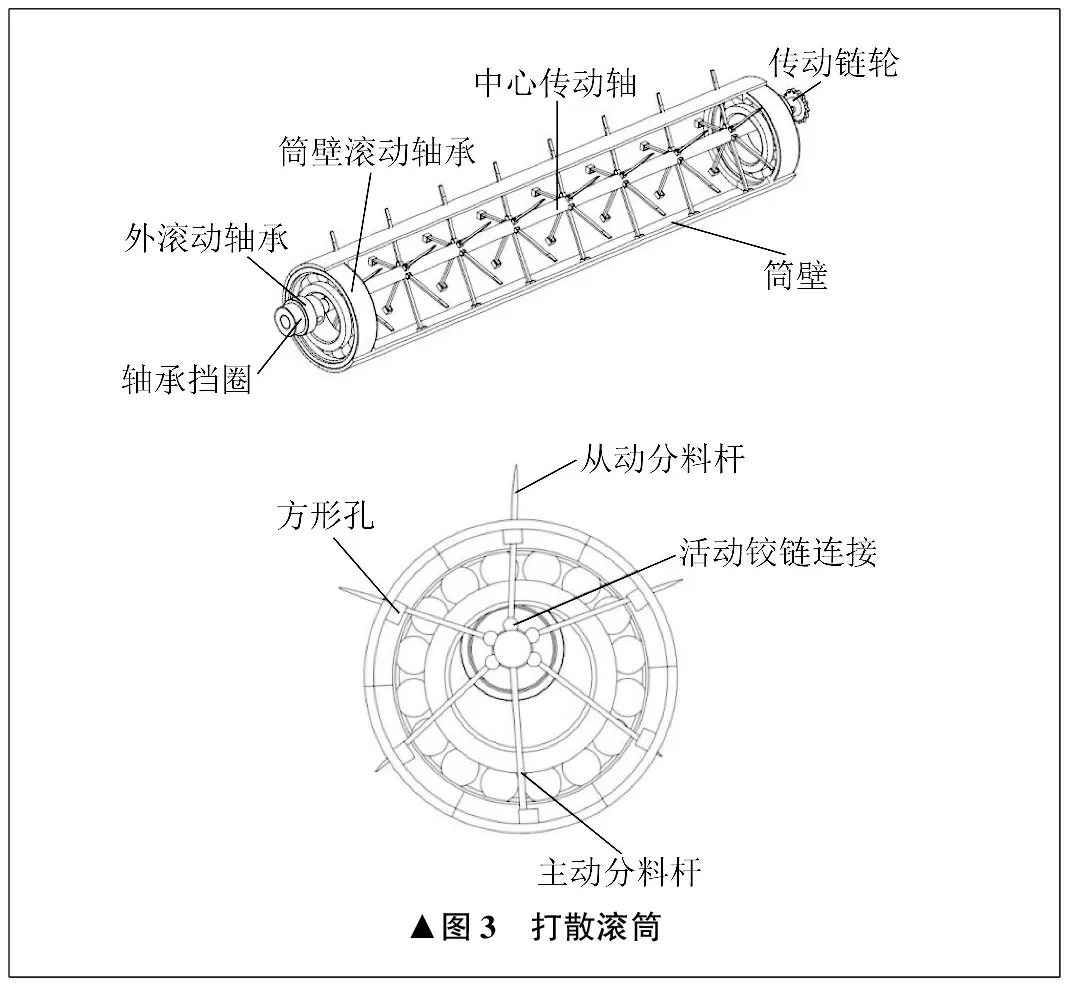
中心传动轴与主动分料杆固定连接,与从动分料杆采用活动铰链连接,从动分料杆可以绕铰链自由摆动。筒壁沿壁周均分为六个部分,每个部分筒壁的中心线上等间隔设置方形孔,分料杆以可通过筒壁上的方形孔伸出筒外。筒壁首尾设有挡块,与滚动轴承相接触,防止筒壁左右滑动。传动链轮为中心传动轴提供动力,轴承挡圈用于防止外滚动轴承左右滑动,起限位作用。
当传动链轮驱动中心传动轴进行转动时,与中心传动轴固定连接的主动分料杆带动筒壁沿外滚动轴承外圈圆周运动。筒壁转动时,筒壁上的方形孔与从动分料杆的接触点处传力,活动铰链随中心传动轴做圆周运动,从而带动其余五根从动分料杆共同运动。由打散滚筒结构不难发现,在打散滚筒动作过程中,筒壁上的方形孔与中心传动轴轴心距离越小,分料杆伸出筒壁的部分越长。伸出部分可以实现对稻草原料的分离、刮落。当筒壁上的方形孔与中心传动轴轴心距离最大时,分料杆完全缩回筒内,完成稻草的分离、刮落处理。
4.2 布草摆板
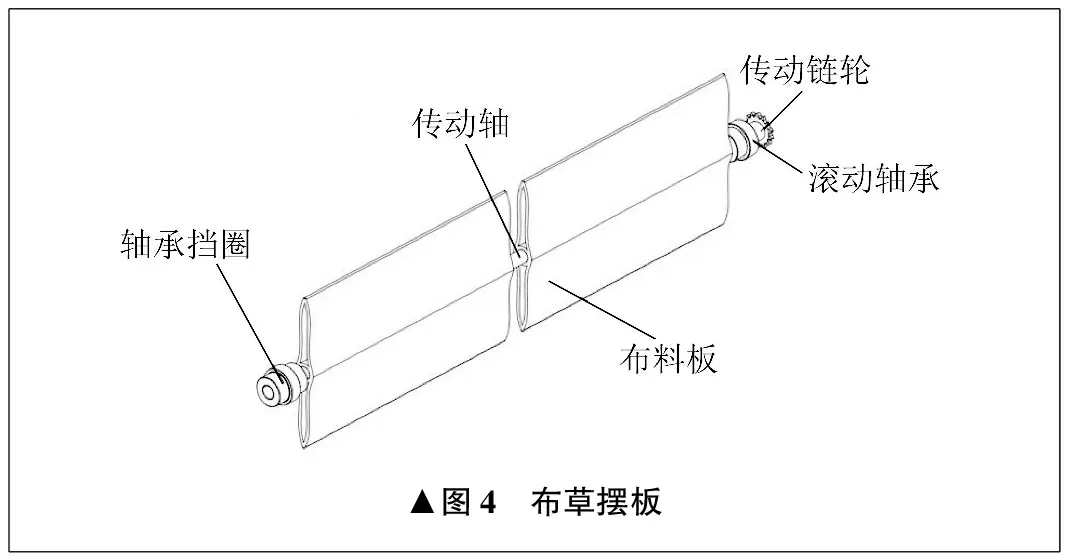
布草摆板由传动轴、布料板、滚动轴承、轴承挡圈、传动链轮组成,如图4所示。传动轴与两块布料板的中心孔固定连接,首尾设有滚动轴承,便于与外界支承和连接。轴承挡圈用于防止传动轴上的滚动轴承左右滑动,起限位作用。
四组布草摆板并排横置于储料仓体底部,当稻草原料经打散滚筒打散、分离,掉落至布草摆板周围时,布草摆板传动链轮驱动传动轴来回转动,转动角度范围为50°~60°,布料板随传动轴左右摆动,加速周围稻草原料掉落,防止稻草原料相互缠绕。
5 输送机构
输送机构如图5所示,主要由六条带拨料齿的同步转运输送带并排组成,同步转运输送带间有两两重合和两两分离的距离设置装置。输送机构前后分别设有主动传动轴和从动传动轴,传动轴穿插于同步转运输送带带轮的中心孔。主动传动轴通过联轴器与电机驱动装置连接,实现传动。在输送机构尾部同步转运输送带之间设有分料隔板。主动传动轴和从动传动轴首尾设有支撑座,用于支撑同步转运输送带。传动轴上设有滚动轴承和轴承挡圈,用于传动轴的支承连接和限位。
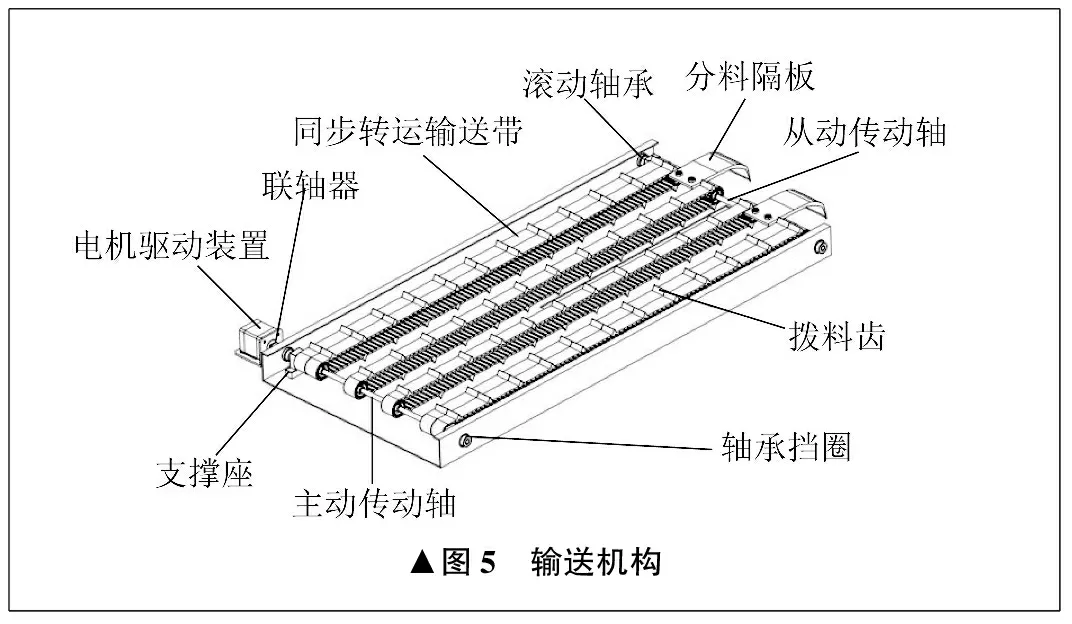
稻草原料经由打散分离机构处理后,撒布于同步转运输送带的前部。同步转运输送带的拨料齿将稻草原料拨出一层,将拨出的稻草原料运输至同步转运输送带的尾部,从而实现稻草原料的拨料和转运。分料隔板可将同步转运输送带上未利用的稻草原料分离转运至机构外,防止多余的稻草原料堆积及稻草原料与机构相互缠绕。
6 压草机构
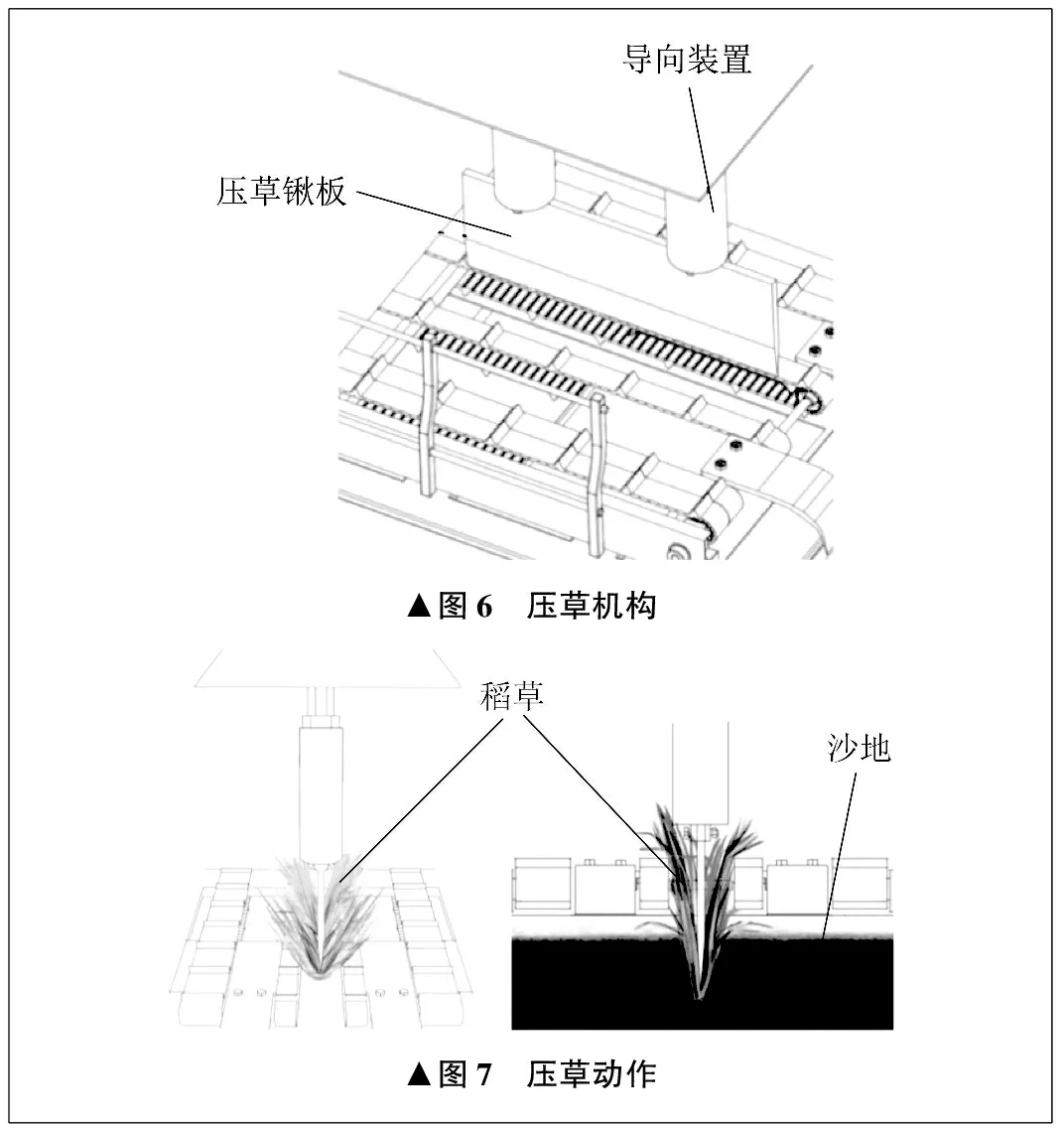
压草机构的设计思路来自于敦煌治沙工人铁锹压草制作草方格的工艺过程[9]。压草机构如图6所示,由压草锹板和导向装置组成,导向装置与储料仓体固定连接。
当输送机构将拨出的稻草原料运输至压草机构下方时,压草锹板通过导向装置向下压住稻草原料中部,进一步将稻草原料从同步转运输送带间直接下压,插入沙土中,并达到一定深度,完成插草作业。压草机构压草动作如图7所示。
7 步行机构
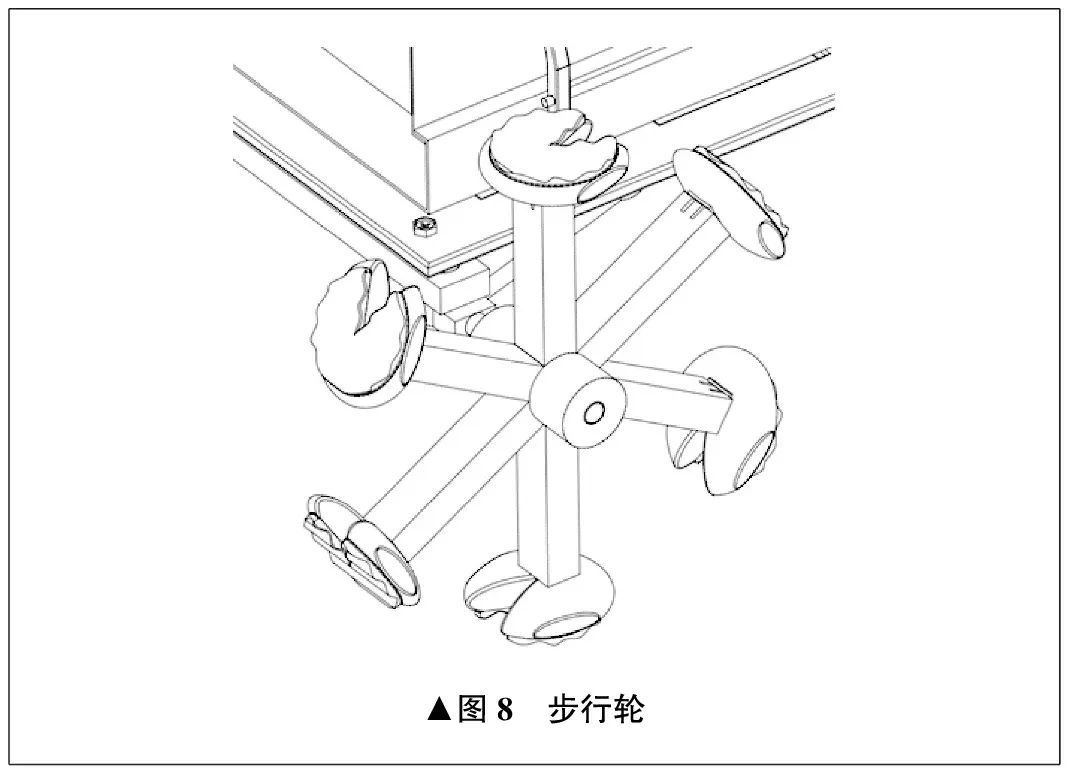
在沙漠中,地形环境复杂,传统的轮行式或履带式机动性有限[10],难以适应复杂沙漠地形的行走,并且会在行走时破坏已铺设好的草方格。
散放稻草草方格铺设机器人的步行机构采用四个特殊形状的步行轮,每个步行轮有六个轮足,轮足底部由特殊形状仿生设计得到[11],可以增大沙地接地面积,更好地适应沙地行走。步行轮如图8所示。四个步行轮通过传动轴与机架相连,每个步行轮独立驱动,步行轮每转一个步距,对应1/6圆周,压草机构压草一次。
8 结束语
笔者设计了具有创新性的散放稻草草方格铺设机器人,介绍了散放稻草草方格铺设机器人的总体结构和各机构设计。
这一散放稻草草方格铺设机器人可以直接使用散放稻草原料铺设草方格,解决稻草缠绕等问题,处理稻草方便高效,实用性强。这一散放稻草草方格铺设机器人整机体积较小,作业时不会破坏已铺设好的草方格,适用于沙漠环境,应用后能够解决人工铺设草方格治沙劳动强度大、效率低等问题。
猜你喜欢
西华大学学报(自然科学版)(2022年3期)2022-05-13
科海故事博览·下旬刊(2022年4期)2022-05-07
起重运输机械(2022年2期)2022-03-04
数学小灵通(1-2年级)(2021年12期)2021-12-30
数学小灵通(1-2年级)(2020年12期)2021-01-14
客车技术与研究(2020年3期)2020-06-23
汽车实用技术(2019年22期)2019-11-29
小学生导刊(2018年16期)2018-11-30
小学生导刊(2018年1期)2018-03-15
汽车实用技术(2014年7期)2014-02-20
