基于归一化水体指数及其阈值自适应算法的水体遥感反演效果分析
2022-09-06 11:58刘宏洁宋文龙刘昌军卢奕竹桂荣洁
中国水利水电科学研究院学报 2022年3期
刘宏洁,宋文龙,刘昌军,卢奕竹,曲 伟,唐 锐,桂荣洁,3
(1.中国水利水电科学研究院,北京 100038;2.陕西航天技术应用研究院,陕西 西安 710000;3.首都师范大学 资源环境与旅游学院,北京 100871)
1 研究背景
基于光学卫星影像的主要水体提取方法有单波段阈值法、多光谱波段法、水体指数法、光谱匹配法等[1-7]。水体指数法是利用卫星多光谱遥感影像提取水体信息的一种重要方法,以其应用简便、精度较高等优点而被广泛应用[8-11]。利用NDWI提取水体信息,其阈值确定与修正对于其在不同水质条件下的适用性至关重要[11-12]。
水体指数法以归一化水体指数(NDWI)与改进的归一化水体指数(MNDWI)应用较多[8-11],然而考虑到许多高分辨率卫星影像不具备短波红外,因此在高分辨率的水体提取中NDWI仍为第一选择[13]。由于水体在红外波段的反射率比可见光波段的反射率更低[3-6,11],水体的NDWI值大于零,而植被、裸露土地、建设用地等地物的NDWI值小于零,因此通常以0为阈值对NDWI进行二值化分割[14]。云雾冰雪由于散射严重导致各个波段辐射率较高,在卫星影像的各个波段都呈亮白色,计算得到的NDWI值虽较植被、裸地要高,与液态水体较为接近,但是总体仍然低于液态水体,并且通常小于0[14-15],因此以0为阈值可以排除绝大部分将云雾误分为水体的情况;然而,泥沙含量较高的水体,对可见光的反射率明显提高[16],并且受泥沙含量和泥沙的粒径影响;当水体富营养化时会减少对红外波段的吸收[17],最终导致NDWI对水体的区分度减弱。因此简单以0为阈值对存在云雾、泥沙和富营养化等水体的提取误差较高,需要根据云雾、水质等实际情况对阈值做出自适应调整,才能提高NDWI方法的适用性[18-19]。最大类间方差算法(OTSU算法)具有简单快速的优点[20-21],袁欣智等[22]对NDWI使用OTSU阈值确定方法进行了局部自适应阈值水体提取,相对于全局阈值一定程度上改善了地形阴影与建筑物等的影响,但自定义阈值的确定与局部范围的大小和水体非水体的比例等有直接关系;Li等[23]采用了OTSU与均匀度测量结合的方法进行分割,增强了传统OTSU抗噪声性能,认为改进的OTSU方法提高了水体提取的精度、降低了错误率,但由于分割背景较大、目标较小,因此存在虚假分割问题;Jiali Shao等[24]基于FY-4a影像使用OTSU算法结合线性光谱分解法自动提取南亚洪水信息,认为可以得到可靠的水体信息。水体像元与非水体像元的占比不均衡,会造成OTSU自适应阈值偏大,不适用于具有明显丰水期和枯水期的水体。YANG P等[25]基于均值漂移算法(Mean-Shift)提取水面漂浮物,认为该方法有效可行但存在视觉误差,JIA Hu等[26]使用Mean-Shift算法结合NDVI的边缘监测信息提取了东洞庭湖的湿地信息,认为比单独使用Mean-Shift算法取得更好的效果;BENGOUFA S等[27]基于Mean-Shift分割算法对海岸线进行监测与提取,并给出最佳参数设置,但提取精度不及多分辨率分割(MRS)方法。Mean-Shift算法是一种广泛使用的图像算法[28],但其在水体信息提取方面的应用研究相对较少。
本文基于Landsat-8与高分一号(GF-1)光学多光谱影像,使用归一化水体指数(NDWI)常用阈值0(TH0)、OTSU自适应阈值(THotsu)以及Mean-Shift自适应阈值(THMS)对正常水体、云雾覆盖水体、高含泥沙水体及富营养化典型水体进行水体信息提取、精度对比与方法适用性分析,为复杂条件下的水体信息遥感反演提供方法参考。
2 研究方法与数据源
2.1 研究方法
(1)归一化水体指数(NDWI)。归一化水体指数(NDWI)由Gao于1996年提出[29],计算公式如下:

式中B2与B4为光学多光谱影像中的绿光波段和近红外波段的反射率。NDWI指数可以最大程度地抑制植被信息进而突出水体特征。
(2)最大类间方差算法(OTSU)。最大类间方差算法(OTSU)最早由日本学者NOBUYUKI OTSU提出[20],是一种自适应阈值确定方法。
假设存在阈值TH将图像所有像素分为两类C1(小于TH)和C2(大于TH),则这两类像素各自的均值为m1、m2,图像全局均值为mG,同时像素被分为C1和C2类的概率分别为p1、p2,则有:

根据方差的概念,则类间方差为:

将式(2)代入式(4)进行简化得:
采用遍历的方法使得σ2最大化的灰度级K即为OTSU阈值。
(3)均值漂移聚类算法(Mean-Shift)。均值漂移聚类算法(Mean-Shift)最初由Fukunaga等人提出[30],直到1995年Cheng等人发表的文献定义了核函数和权值系数[31],才使Mean-shift算法得到了广泛应用[32-33]。Mean-Shift算法的基本思想如下:
在直方图横轴上均匀设置一定数量的初始聚类中心;按照给定的聚类半径按照均值漂移的方法移动这些聚类中心,并记录每个距离中心的移动方向;当聚类中心稳定后,移向某聚类中心的初始聚类中心之间的值都划归本类别。
其形式化定义为:

式中:xi为待聚类的样本点;yk为点的当前位置;yk+1为点的下一个位置;h为带宽。
2.2 数据源 所用遥感数据为Landsat-8 OLI光学多光谱影像与GF-1WFV光学多光谱影像。其中,Landsat-8是NASA与美国地质调查局(USGS)合作开发,携带陆地成像仪(Operational Land Imager,OLI)和热红外传感器(Thermal Infrared Sensor,TIRS),影像空间分辨率为30 m。GF-1是高分辨率对地观测系统国家科技重大专项的首发星,配置了2台2 m空间分辨率全色/8 m空间分辨率多光谱相机,4台16 m空间分辨率多光谱宽幅相机。需要指出的是,在有厚重云雾覆盖的情况下,如果没有特殊的技术手段与其他信息辅助的话,水体信息提取的准确度难以保证,因此本文选择云雾覆盖影像时主要选取薄雾覆盖影像。所选影像具体信息如表1。

表1 选用的遥感影像信息
3 结果分析
基于Landsat-8与GF-1光学多光谱影像,使用归一化水体指数法阈值0(TH0)、最大类间方差法(OTSU)自适应阈值(THotsu)与均值漂移聚类算法(Mean-Shift)自适应阈值(THMS)对典型正常水体、云雾覆盖水体、富营养化水体、高含泥沙水体进行水体遥感提取与效果分析。
3.1 正常水体提取效果分析
(1)提取结果。基于Landsat-8与GF-1多光谱影像提取的密云水库正常水体的NDWI分别如图1(a)与图1(b)所示,其影像无云雾覆盖、无结冰、含泥沙与微生物较少,可看到水体部分呈亮白色,非水体部分呈暗色。基于Landsat-8影像,使用TH0、THotsu、THMS的水体提取结果分别如图1(c)、图1(e)和图1(g)所示。由图可知,TH0与THMS均能较好提取出水体区域,边界清晰连贯;而THotsu所提取的水体区域不完整,在西南侧有缺失,边界破碎不连贯。基于GF-1影像,使用TH0、THotsu、THMS的水体提取结果分别如图1(d)、图1(f)和图1(h)所示。由图可知,TH0、THotsu、THMS均能较好的提取出水体范围,边界较连贯,且无明显水体缺失。

图1 密云水库正常水体NDWI值及水体信息提取结果图
(2)精度分析。基于Landsat-8与GF-1多光谱影像,对水体指数法TH0、THotsu以及THMS遥感反演提取的密云水库正常水体信息结果进行混淆矩阵精度分析,如表2所示。基于Landsat-8影像,TH0提取精度最高,总精度为95%,Kappa系数为0.89;THMS提取结果也较为理想,总精度为89%,Kappa系数为0.78;而THotsu提取精度最低,为82%,Kappa系数为0.62,主要原因是水体与非水体像元占比不均衡导致OTSU自适应阈值THotsu偏高,水体西南侧NDWI值较低,因此西南侧水体像元错分现象较为严重。基于GF-1影像,TH0、THotsu与THMS提取精度均较为理想,分别为94.32%、91.12%和93.11%,Kappa系数分别为0.88、0.82与0.86。由表2可知,对于正常水体,Landsat-8或者GF-1多光谱影像对于提取结果无明显影响。

表2 正常水体在不同数据源与阈值下提取结果的混淆矩阵
3.2 云雾覆盖水体提取效果分析
(1)提取结果。基于Landsat-8与GF-1多光谱影像提取的云雾覆盖下黄河中游某段水体的NDWI分别如图2(a)与图2(b)所示。基于 Landsat-8影像,使用TH0、THotsu、THMS的水体提取结果分别如图2(c)、图2(e)和图2(g)所示。由图可知,尽管TH0没有将云雾错分为水体,但在有云雾遮盖的地方,即使云雾覆盖量较低,也无法将水体信息有效提取出来;THotsu对于水体信息的提取有更多的遗漏;与TH0、THotsu提取效果相比,THMS对少量云雾覆盖下的水体信息有较好的提取效果。基于GF-1影像,使用TH0、THotsu、THMS的水体提取结果分别如图 2(d)、图 2(f)和图 2(h)所示。由图可知,TH0提取效果同Landsat-8数据源效果一致,在有薄雾覆盖的地方,无法有效提取水体信息;THotsu水体提取范围更破碎且边界更加不连贯;THMS水体提取效果优于TH0、THotsu,在可目视判断出水体的位置基本有效提取出水体信息,而在云雾覆盖稍厚的位置(如图2(b)左侧位置)也较难有效提取出水体信息。

图2 云雾覆盖下黄河中游某段水体NDWI值及水体信息提取结果图
(2)精度分析。基于Landsat-8与GF-1多光谱影像,对水体指数法TH0、THotsu以及THMS遥感反演提取的云雾覆盖下黄河中游某段水体信息结果进行混淆矩阵精度分析,如表3所示。基于Landsat-8影像,THMS提取精度最高,总精度为97%,Kappa系数为0.94,此方法对少量的云雾覆盖水体仍具有较高的提取精度;TH0提取结果总精度为85%,Kappa系数为0.53;THotsu提取精度最低,总精度为79%,Kappa系数为0.31。基于GF-1影像,THMS提取精度最高,总精度为89.13%,Kappa系数为0.72;TH0与THotsu提取结果总精度分别为75.44%与73.05%,Kappa系数仅为0.17与0.06。由表3可知,THMS对少量云雾覆盖水体仍具有相对乐观的提取精度;而对于TH0,水体非水体像元错分现象较为严重,主要集中在云雾覆盖处,说明即使是少量云雾覆盖也对此阈值有较大影响;而由于云雾覆盖以及水体像元与非水体像元占比不均衡原因,导致THotsu提取效果最差;对于少量云雾覆盖下的水体,Landsat-8较GF-1多光谱影像具有更高的提取精度。

表3 云雾覆盖水体在不同数据源与阈值下提取结果的混淆矩阵
3.3 富营养化水体提取效果分析
(1)提取结果。选取的洱海水体富营养化较为严重[34],基于Landsat-8与GF-1多光谱影像提取的NDWI分别如图3(a)与图3(e)所示。基于Landsat8影像,使用TH0、THotsu以及THMS的水体提取结果分别如图3(b)、图3(c)和图3(d)所示,三种方法均能将水体边界识别出,但THotsu对于藻类微生物较多处难以进行有效的水体提取,在图3(a)中也可看出洱海中部水体藻类微生物较多处NDWI值偏低。基于 GF-1影像,使用 TH0、THotsu、THMS的水体提取结果分别如图 3(f)、图 3(g)和图 3(h)所示,由图3(e)可知,此幅影像无较为严重的水藻聚集,而TH0、THotsu、THMS均可较好的提取出水体信息,边界连贯,水体无破碎。

图3 富营养化洱海水体NDWI值及水体信息提取结果图
(2)精度分析。基于Landsat-8与GF-1多光谱影像,对水体指数法TH0、THotsu以及THMS遥感反演提取的富营养化洱海水体结果进行混淆矩阵精度分析,如表4所示。基于Landsat-8影像,THMS提取精度最高,总体精度为97%,Kappa系数为0.93;TH0提取结果精度也较理想,总体精度为96%,Kappa系数为0.91;THotsu提取精度最低,总体精度仅为66%,Kappa系数仅为0.35,水体像元错分为非水体像元的情况主要集中在富营养化较严重的水体处。基于GF-1影像,TH0与THMS提取总精度均较高,分别为93.19%与93.28%,Kappa系数分别为0.87与0.86;而THotsu提取总精度为80.11%,Kappa系数为0.60。由表4可知,对于富营养化水体,TH0与THMS提取精度均较高,且数据源对提取精度的影响表现出一致性,即Landsat-8较GF-1多光谱影像具有更高的水体提取精度;而基于GF-1的THotsu提取精度更低,因为该高分影像富营养化较严重处NDWI值较低,因此导致错分现象较为严重。

表4 富营养化水体在不同数据源与阈值下提取结果的混淆矩阵
3.4 富含泥沙水体提取效果分析
(1)提取结果。选取的黄河下游某段水体的含泥沙量较高,基于Landsat8与GF-1多光谱影像提取的NDWI分别如图4(a)与图4(e)所示。基于Landsat-8影像,使用TH0、THotsu以及THMS的水体提取结果分别如图4(b)、图4(c)和图4(d)所示。TH0和THMS水体提取效果都比较理想,均好于THotsu提取效果。基于GF-1影像,使用TH0、THotsu以及THMS的水体提取结果分别如图4(f)、图4(g)和图4(h)所示,THMS可较好的提取出水体范围,TH0基本提取出水体范围,但潜水区出现水体破碎,而THotsu提取效果较差,水体破碎不连续情况较为严重。

图4 高含泥沙黄河下游某段水体NDWI值及水体信息提取结果图
(2)精度分析。基于Landsat-8与GF-1多光谱影像,对水体指数法TH0、THotsu以及THMS遥感反演提取的高含泥沙黄河下游某段水体结果进行混淆矩阵精度分析,如表5所示。基于Landsat 8影像:THMS提取精度最高,总体精度为94%,Kappa系数为0.88;TH0提取结果总体精度为93%,Kappa系数为0.87;THotsu提取精度最低,总体精度为75%,Kappa系数为0.52。基于GF-1影像:THMS提取总精度最高,为91.54%,Kappa系数为0.83;而TH0和THotsu提取效果一般,水体像元错分为非水体像元情况较为严重,其中TH0总精度稍高,为72.64%,Kappa系数为0.44,THotsu总精度为65.67%,Kappa系数仅为0.30。由表5可知,对于THotsu和THMS,基于Landsat-8多光谱影像的水体提取总精度更高;TH0总精度差距较大,这可能是由于数据源问题导致影像NDWI值整体偏低,THotsu和THMS作为自适应阈值可对阈值大小自动做出调整,而TH0为固定阈值。
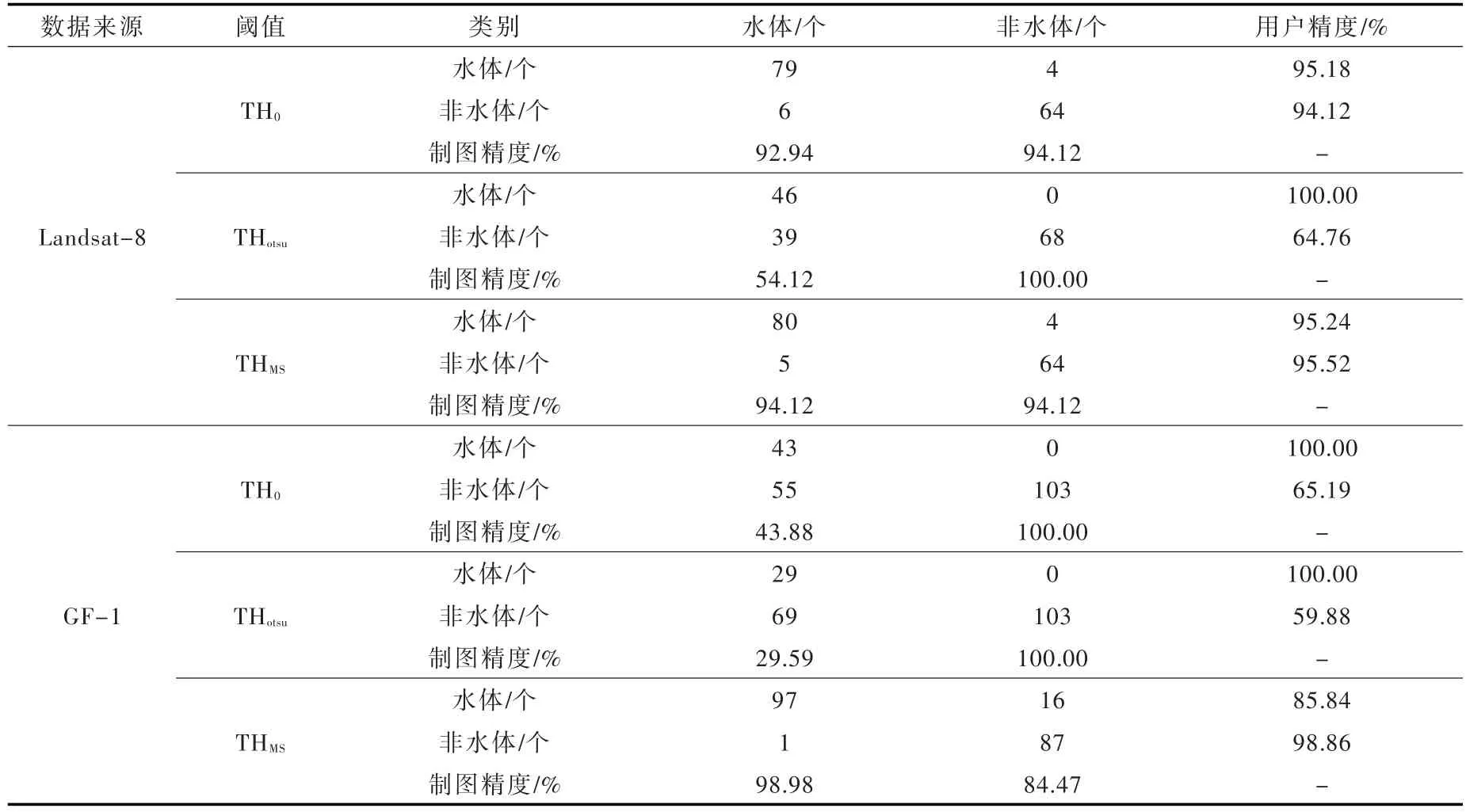
表5 高含泥沙水体在不同数据源与阈值下提取结果的混淆矩阵
4 结论
针对光学多光谱卫星影像提取水体信息中归一化水体指数(NDWI)法阈值选取与自适应修正问题,基于Landsat-8和GF-1数据源,使用归一化水体指数法阈值0(TH0)、最大类间方差法(OTSU)自适应阈值(THotsu)与均值漂移聚类算法(Mean-Shift)自适应阈值(THMS)分别对典型正常水体、云雾覆盖水体、富营养化水体、高含泥沙水体开展了水体遥感提取与适用性效果分析研究,得到如下主要结论:
(1)对于正常水体,Landsat-8和GF-1多光谱影像表现出相同的规律,TH0提取精度最高,THMS次之,THotsu最低,THotsu提取效果受影像范围内水体与非水体像元占比影响。
(2)对于云雾覆盖的水体,少量云雾覆盖下THMS仍然具有较高的水体提取精度,TH0提取精度次之,THotsu提取精度最低,且Landsat-8多光谱影像较GF-1多光谱影像具有更高的水体提取精度。
(3)对于富营养化水体,THMS与TH0均表现出较高的提取精度,且Landsat-8多光谱影像较GF-1多光谱影像具有更高的水体提取精度;而THotsu表现出差异,这可能由两幅影像的水体部分富营养化程度不同导致,且可看出富营养化更严重的区域水体提取精度更低。
(4)对于高含泥沙水体,THMS提取精度最高,THotsu提取精度较低,Landsat-8多光谱影像较GF-1多光谱影像具有更高的水体提取精度;而基于GF-1多光谱影像TH0的提取精度较低,可能与传感器等数据源问题导致影像整体NDWI偏低有关。
通常情况下应用归一化水体指数法阈值0(TH0)即可对光学多光谱卫星影像提取出较高精度的水体信息,均值漂移聚类算法(Mean-Shift)自适应阈值(THMS)适应于复杂条件尤其是少量云雾覆盖下的水体信息提取,对于不同条件下的水体可通过调整聚类半径来实现水体的高精度提取,建议聚类半径为1~13,当水体与非水体像元NDWI值差异较大时减小聚类半径会取得更好的提取效果,反之则增大聚类半径。
猜你喜欢
音乐天地(音乐创作版)(2022年6期)2022-10-14
北京航空航天大学学报(2022年8期)2022-08-31
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
黑龙江大学自然科学学报(2022年1期)2022-03-29
作文·小学低年级(2021年2期)2021-11-02
空间科学学报(2021年1期)2021-05-22
作文小学中年级(2021年2期)2021-03-15
皮革制作与环保科技(2020年14期)2020-03-17
湖北农业科学(2016年20期)2017-02-15
科技视界(2016年13期)2016-06-13