一种新型自动上下楼轮椅的力学分析
2022-09-08 08:12李哲伍世英许昌
机械工程师 2022年9期
李哲,伍世英,许昌
(1.广州铁路职业技术学院 机电工程学院,广州 510430;2.武汉理工大学 艺术与设计学院,武汉 430070)
0 引言
随着人均寿命的增加,人口老龄化形势严峻,许多发展中国家的老龄人口已占到其总人口的10%,欧美日本等发达国家的老龄人口占比更高。我国老年人占比将近14%,老年人因机体功能降低、疾病等原因造成行走能力减低或丧失的非常多,而腿脚不便的残疾人士也超过8千万人[1]。这是一个庞大特殊的群体,需要社会的关爱,也需要多种适合他们心理和生理特征的辅助工具。轮椅是目前老年人和腿脚不便人士使用得最多也最方便的工具。借助于轮椅,使得老年人和腿脚不便的人士具有了一定的行动能力,他们可以自理生活、料理家务,甚至能胜任适当的工作。
由于结构上的缺陷,普通轮椅面对台阶和楼梯等障碍物时只能望而却步,即使有专业看护人员陪同,想要翻越这些障碍物也十分困难[2]。这种缺陷给轮椅使用者的生活带来了极大的不便,很多依靠轮椅行走的人员平时只能够呆在家里,缺少户外活动不利于人的身心健康,且给家人也带来了麻烦。由于条件的限制,不可能在所有的地方都设置无障碍设施[3-4]。因此,解决老年人与残疾人士出行难最好的方法就是设计一种既能够像普通轮椅适应平地行走又能够翻越障碍、上下楼梯的轮椅。
可上下楼梯的轮椅装置最先由美国的Bray在100多年前开始研究。近半个世纪以来欧美各发达国家均开始关注可自动上下楼梯轮椅及装置的研究,有一些产品已经投入市场使用。目前已有的上下楼梯轮椅按其工作原理分为履带式、轮组式和步行式3种。履带式轮椅在上下楼梯过程中行走连续性强,操作者不需要额外的操作即可完成上下楼,轮椅的重心一直沿着楼梯的倾角线直线运动,平稳安全。履带式轮椅最大的不足是体积、自重较大,平地行驶缓慢,上下楼梯时易造成楼梯边沿的破损[5-6]。轮组式轮椅虽能实现自动上下楼梯,但其体积过大且自身质量大,空间小的地方无法使用,平地上适用性差[7-9]。步行式轮椅上下楼梯时平稳可靠,能适应多种不同尺寸的台阶,但它对控制的要求高,操作复杂,老年人使用比较困难,且对楼梯质量要求较高,上下楼梯速度较慢[10-12]。
目前对于可上楼轮椅的研究已有一定基础,针对前期设计中存在的问题,本文设计了一款适用于老年人或腿脚不便的人员且能够帮助使用者安全轻松地上下楼的新型轮椅,现对其平地行走和上下楼过程进行力学计算和动力分析,为其动力系统的选定提供数据支撑;同时也对其结构进行强度和刚度的校核并针对上下楼过程开展运动分析,以验证其安全性。
1 轮椅主体结构及运动过程
1.1 主体结构
该新型轮椅的主体由前后轮、把手、扶手、控制器、后轮、前轮(爬楼)、踏板、前轮(平地)、前轮调节杆、轮转动杆导轨固定架、轮转杆转动轴架、扶手调节杆、轮转杆转动轴、后轮调节杆、电池箱、储物箱、轮转动杆导轨固定架等组成,轮椅主体结构如图1所示。
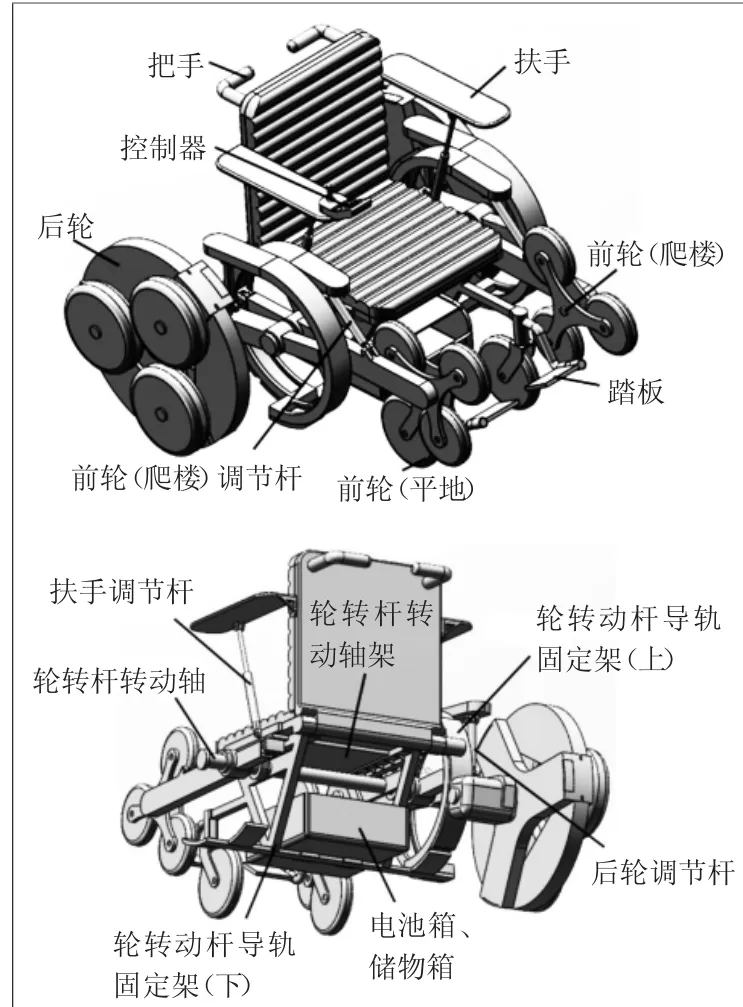
图1 轮椅主体结构示意图
该轮椅在传统轮椅的结构基础上进行了相关改进。首先,该设计摈弃了传统轮子的固定形态结构,采用三角轮结合弹簧机构组合成可变形结构,使轮子能够在平地行驶状态和上下楼状态之间快速切换。考虑到轮椅上楼时重心后倾的问题,在后轮部位增加了伸缩杠以保证轮椅上楼时的重心平稳。
当轮椅上楼时,前轮向上行驶,后轮沿驱动杆伸展,控制轮椅的重心,防止轮椅后倾,极大地提升了轮椅的安全系数和平稳性。
1.2 上楼过程
轮椅乘坐者在上楼前发出指令,后轮向后运动,将转动杆的缩入的部件全部伸出并锁死,前轮调节杆伸长,使前轮下降。
上楼梯时由前轮先爬上第一级楼梯,然后锁死。随后后轮逆时针转动,使后轮向前运动,后轮调节杆伸长,转动杆开始转动,轮椅开始抬升直到座椅主体水平。
前、后轮均允许转动,后轮开始逆时针转动,推动轮椅向前移动。由前轮先爬上第二级楼梯,然后锁死。随后后轮逆时针转动,使后轮向前运动,后轮调节杆伸长,后轮转动杆开始转动,轮椅开始抬升直到座椅主体水平,如图2、图3所示。
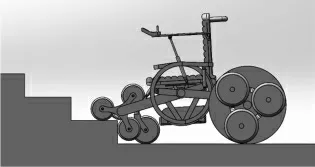
图2 前轮准备上第一级楼梯
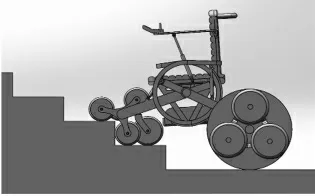
图3 前轮上第二级楼梯
前轮允许转动,后轮允许转动,后轮开始逆时针转动,推动轮椅向前移动。由前轮先爬上第三级楼梯,前轮锁死,后轮开始逆时针转动,使后轮向前运动,后轮调节杆伸长,后轮转动杆开始转动,轮椅开始抬升直到座椅主体水平。后轮继续前进,当后轮开始爬上楼梯时,接触楼梯棱角的轮面回缩,与地面接触三角轮一角的后轮支撑杆伸长,帮助后轮爬上楼梯。
当轮椅整体位于楼梯斜面上,即前后轮均处于楼梯层间时,后轮允许转动,后轮逆时针转动,将轮椅整体推动向上,并由后轮支撑杆协助使轮椅不断上爬,如图4、图5所示。
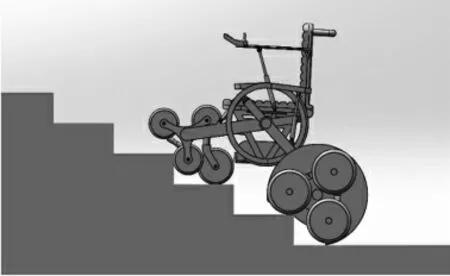
图4 后轮前进,调节杆伸长使座椅整体水平
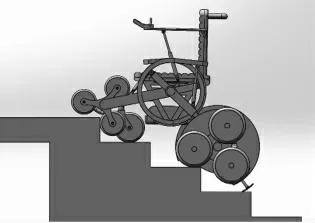
图5 当后轮前进时,后轮支撑杆伸长,使后轮抬升,并防止倾翻
当轮椅前轮完成上一段楼梯到达平地层时,前轮继续向前,当后轮爬上一级台阶后,前轮锁死,后轮调节杆收缩,转动轴开始转动,轮椅开始下降直到座椅主体水平,如图6、图7所示。
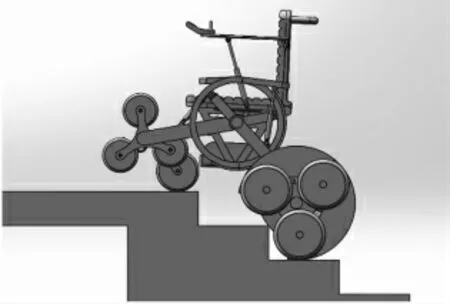
图6 前后轮前进使轮椅前轮到达楼梯平面
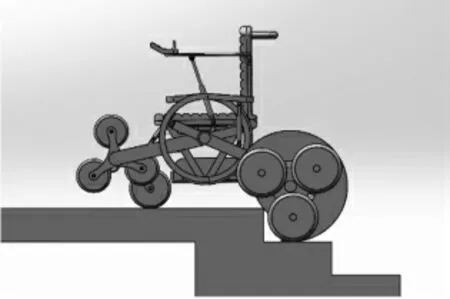
图7 前后轮前进使轮椅继续前进,同时后轮调节杆,收缩使后轮倾角减小
重复上述过程直到轮椅整体到达水平面,完成上楼的全部工序过程,如图8所示。
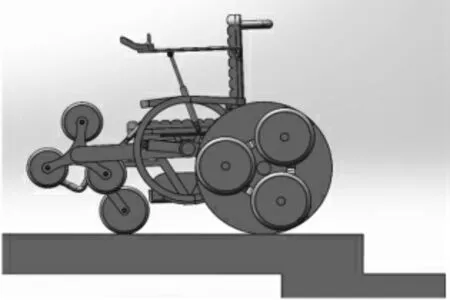
图8 前后轮前进使轮椅继续前进,轮椅整体到达水平面
2 轮椅受力分析
分别选取轮椅平地行驶和完全处于楼梯层间时的两种工况作为受力分析对象,取后轮中心为A点,前轮中心为B点。其工况示意简图如图9所示。
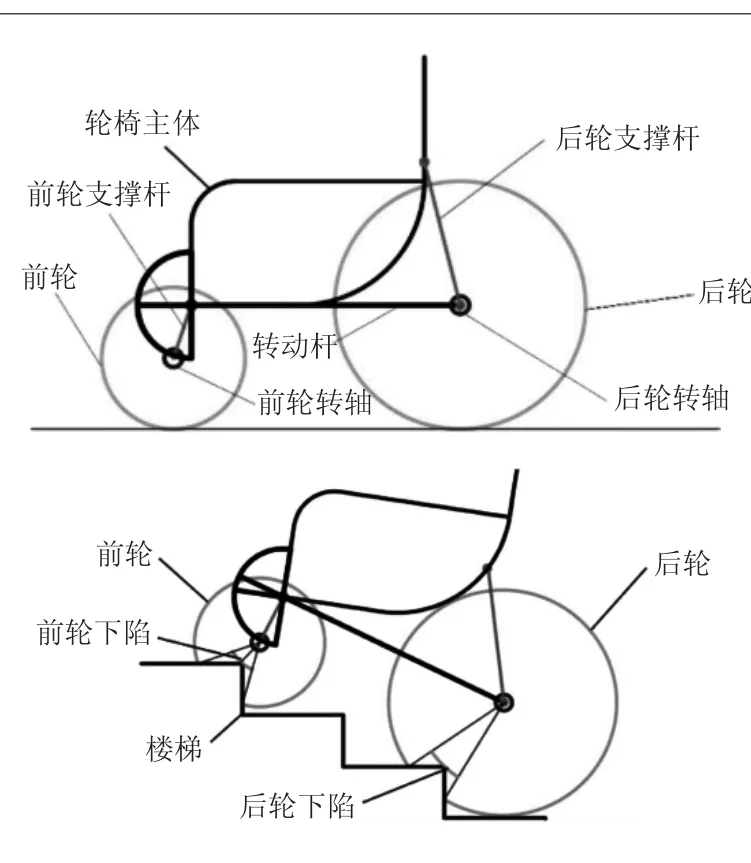
图9 轮椅平地、上楼工况示意图
假设乘坐者的体重为65 kg,上半身的质量为37.7 kg,大腿的质量为16 kg,小腿+脚的质量为7.8 kg,手臂的质量为6.5 kg。轮椅总质量为25 kg,前半部分的质量为10 kg,后半部分的质量为15 kg,重力加速度g=9.8 m/s2。按轮椅乘坐者人员姿态将其分为以下3个重力单元:小腿+脚的重力G1=7.8×9.8=76.44 N;大腿+手臂的重力G2=(13+6.5)×9.8 =191.1 N;上半身的重力G3=37.7×9.8=358.15 N。
按轮椅结构将其分为2个重力单元:前半部分的重力F1=10×9.8=98 N,后半部分的重力F2=15 ×9.8 =147 N。FN1、FN2分别为前轮后轮中心支撑力,设置F3为轮椅连杆铰接点的受力,假设受力方向竖直向上。按轮椅结构尺寸绘制出轮椅在平地行驶时受力图,如图10所示。
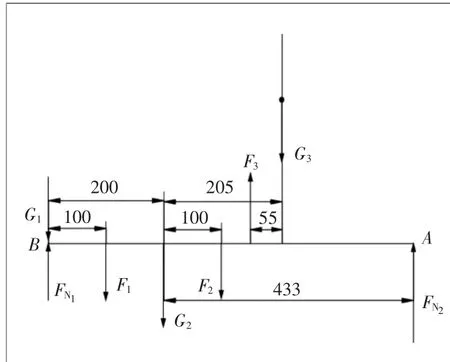
图10 轮椅平地受力图
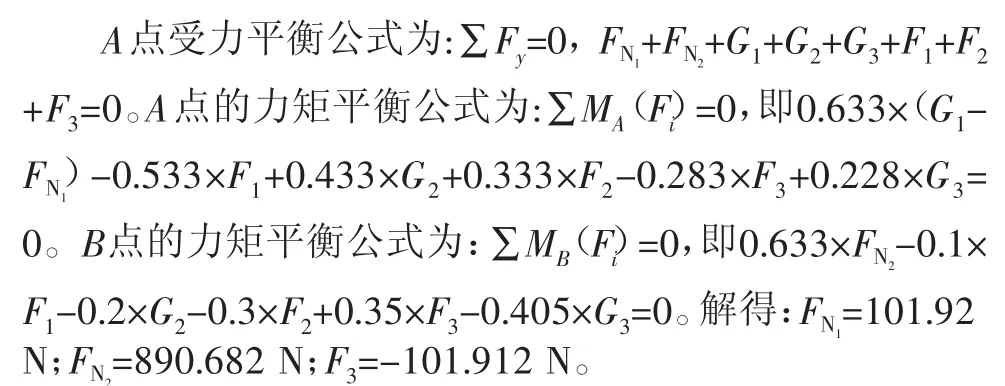
前后轮中心FN1、FN2为正值,轮椅连杆铰接点的受力F3为负值,即真实受力方向为竖直向下,说明轮椅在平地行驶稳定。
轮椅前后轮均处于楼梯层间时,取传动杆与竖直轴夹角为28°,绘制出轮椅在上楼时的受力图,如图11所示。
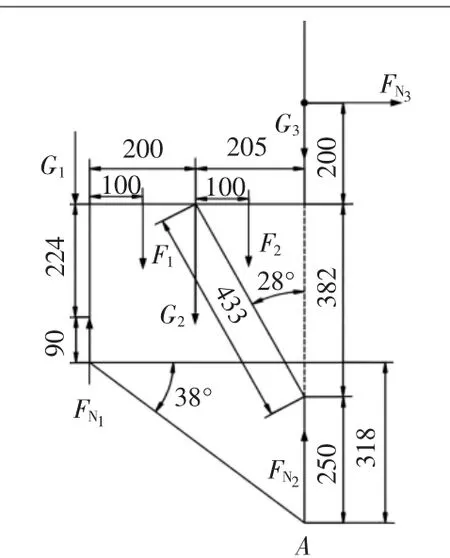
图11 轮椅上楼时受力图
A点的受力平衡公式为:∑Fy=0,即FN1+FN2+G1+G2+G3+F1+F2=0。A点的力矩∑MA=0.405×G1+0.305×F1+0.205×G2+0.105×F2-0.832×FN3=0.405×76.44+0.305×98+0.205×191.1+0.105×147-0.832×49=74.6907>0。
由计算结果得知,轮椅力矩为正值,故在上楼过程中不会发生倾翻的情况。
3 强度校核
选取受力最大的构件——后轮转动杆进行强度刚度校核,按其结构特点分为3段:BC、BE、AE,其截面形状及尺寸及受力情况如图12 所示,已知后轮转动杆的材料为铝合金6070,其屈服强度σs=276 MPa,弹性模量E=70 GPa。
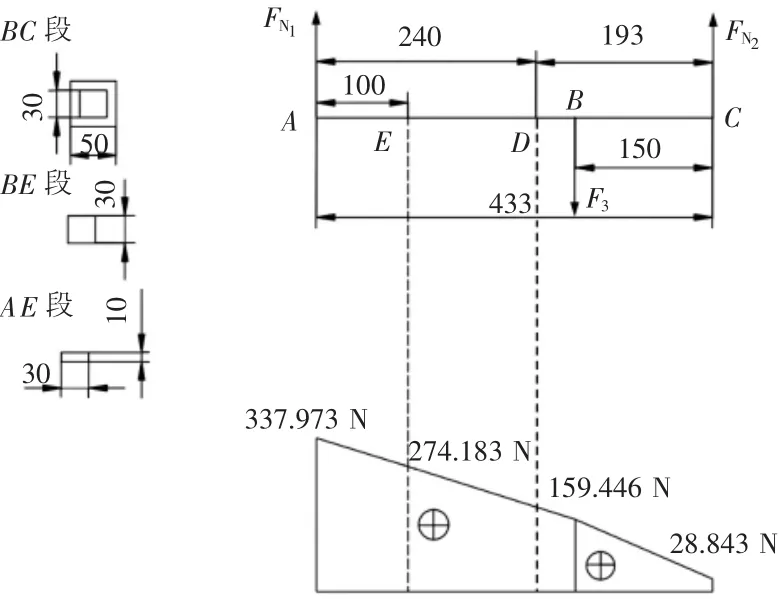
图12 后轮传动杆截面形状及尺寸、受力图
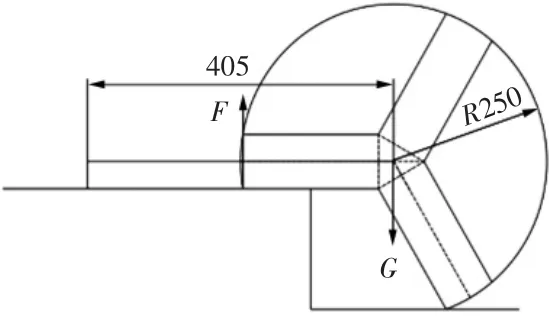
图13 后轮受力示意图
BC 段计算如下:对Z轴(垂直于轮面的轴线)的惯性矩为IZ1=(H4-h4)/12=(0.054-0.034)÷12=4.53×10-7m4;最大弯曲正应力σmax1=MBy/IZ1=185.415×0.025÷(4.53×10-7)=10.233 MPa<[σ]。
ED段计算如下:对Z轴的惯性矩IZ2=h4/12=0.034÷12=6.75×10-8m4;最大弯曲正应力:σmax2=MEy/IZ2=274.138×0.015÷(6.75×10-8)=60.93 MPa<[σ]。
AE段计算如下:对Z轴的惯性矩 IZ3=(bH3-bh3)/12=[0.03×0.133-0.03×0.13]÷12=2.992×10-6m4;最大弯曲正应力σmax3=MAy/IZ3=337.973×0.065÷(2.992×10-6)=7.341 MPa<[σ]。
计算结果显示后轮传动杆满足强度要求。
4 动力分析
所选电动机转矩M=9550×(P/n)=9550×(0.25÷6)=397.62 N·m;其所能提供的驱动力F=M×80%÷0.25=1272.384 N;总力矩∑M=0.255×F-0.405×G=91.097 N·m。
总力矩大于0,可以完成爬楼过程。
5 结语
对一款新型可上楼轮椅进行了平地行驶和上楼过程的受力分析,结果显示其平地行驶及上楼过程中受力良好,且上楼时不会发生倾覆;对轮椅中受力最大的部件后轮转动杆进行强度校核,其强度满足要求,所用材料及其截面尺寸选择合理;所选的电动机能提供足够的动力驱动轮椅上楼。经过计算分析,该轮椅的功能可以满足设计要求,人员安全性可以得到保障。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
黄河之声(2021年6期)2021-06-18
小学生学习指导·爆笑校园(2019年6期)2019-09-10
商周刊(2018年26期)2018-12-29
当代工人(2018年21期)2018-03-06
文学港(2018年1期)2018-01-25
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
小说月刊(2014年5期)2014-04-19
意林(2013年1期)2013-05-14