
基于混合特征和CFOA-GRNN的行星齿轮箱故障诊断研究
2022-09-16 13:05许家才吕亮陆崇山代劲
机床与液压 2022年6期
许家才,吕亮,陆崇山,代劲
(1.国能云南新能源有限公司,云南昆明 650200;2.武汉大学动力与机械学院,湖北武汉 430072)
0 前言
行星齿轮箱是机械传动的关键部件,广泛应用于车辆、船舶、风力发电等领域。由于恶劣的工作环境,随着运转时间的增长,齿轮箱中的齿轮会产生故障,进而造成损失。因此,实现齿轮箱故障诊断,及时识别出设备异常状况,降低维护成本,减少损失,具有较大的工程意义。
目前,许多学者都对齿轮箱故障诊断进行了相关研究。张鑫等人利用离散小波变换获取信号特征矩阵,并利用鲸鱼算法优化的支持向量机实现齿轮箱混合故障诊断。李文耀和杨文刚提出了一种多点峭度和自适应模态分解的特征提取方法,用于齿轮箱复合故障诊断。吴康福和李耀贵将齿轮箱信号奇异值特征、样本熵特征和时域特征进行融合,利用堆栈稀疏自编码器实现特征优化和故障识别。王斌和崔宝珍将集合经验模态分解和多尺度排列熵相结合,用于齿轮箱故障特征提取,并利用极限学习机进行故障识别。张阳阳等采用概率神经网络进行车辆齿轮箱典型故障的识别,相比BP神经网络,该方法能达到更高的准确率。汤宝平等对振动信号进行共振稀疏分解,得到高、低共振分量,构建多共振分量融合卷积神经网络,进行了行星齿轮箱故障诊断。崔彦平等利用分段三次Hermit插值法改进LMD,提高了信号分解的精度,并与切片双谱相结合,有效实现了齿轮箱复合故障特征的提取。程加堂等提出一种基于混沌量子粒子群优化BP神经网络的故障诊断方法,用于风电机组齿轮箱故障的识别。从以上研究可以看出,齿轮箱故障诊断的研究重点主要集中在信号特征提取和故障识别算法两个方面,目前应用较为广泛的方法主要有小波变换、经验模态分解、支持向量机、极限学习机以及神经网络等。
本文作者提出一种基于信号混合特征的CFOA-GRNN行星齿轮箱故障诊断方法。首先,获取信号时域特征和频域能量特征,输入广义回归神经网络;利用混沌扰动改进的果蝇优化算法对网络参数进行寻优,建立最优模型进行故障诊断,并通过行星齿轮箱实验台采集的振动信号进行应用测试。结果表明:该方法能达到比较理想的诊断效果,且相比其他故障诊断模型具有参数简单、寻优速度快等优势。
1 CFOA-GRNN算法概述
1.1 广义回归神经网络
广义回归神经网络(Generalized Regression Neural Network,GRNN),是1991年由SPECHT提出的一种基于非线性回归理论的前馈式神经网络模型,其结构如图1所示,由输入层、模式层、求和层和输出层构成。
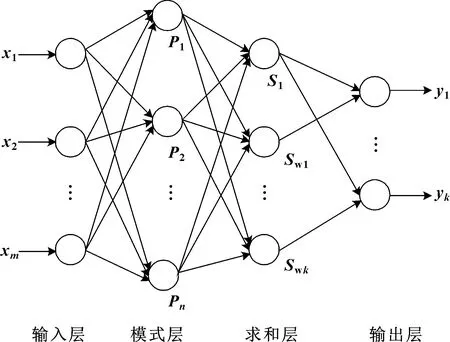
图1 GRNN网络结构
GRNN输入层神经元个数等于输入向量的维数,输入层负责将输入数据传递给中间层。模式层是径向基层,激活函数一般为高斯函数,其神经元个数等于训练样本个数,每个神经元对应不同的训练样本。求和层分为两种不同的神经元,一种是对模式层各神经元进行代数求和,另一种是对模式层各神经元进行加权求和。输出层神经元个数等于输出向量维数,将求和层中两种神经元的输出相除,得到网络输出值。与应用较广泛的BP神经网络相比,GRNN具有单程训练不需要迭代、计算量小、收敛速度快等优点,而且网络训练过程需要人为调节的参数只有光滑因子spread,一定程度上降低了主观因素对训练结果的影响。
1.2 混沌果蝇优化算法
果蝇优化算法(Fruit Fly Optimization Algorithm,FOA)是由潘文超提出的一种基于果蝇种群觅食行为的全局寻优仿生算法。该算法与粒子群算法、蚁群算法等相比,具有设置参数少、收敛速度快、精度高、结构简单等优势。但果蝇优化算法受初值选取的影响,仍然存在易陷入局部最优解,导致收敛精度降低、收敛速度变慢的问题。
混沌扰动算法是一种全局优化方法,其原理是将待优化变量通过混沌映射规则映射到混沌变量空间的取值区间内,利用混沌变量的随机性、遍历性、规律性和初值敏感性迭代寻优搜索,将获得的优化解反向映射转化到优化空间,寻求最优解。混沌扰动通常采用Logistic映射,其方程为
(+1)=()[1-()]
(1)
式中:为迭代次数;()∈[0,1]为混沌变量;为控制参数,当=4时,系统处于混沌状态。与待优化变量∈[,]可由下式进行往返映射;
=(-)(-)
(2)
′=+(-)
(3)
式中:′为经迭代后的混沌变量从混沌区间转化为待优化变量区间而获得的值。
混沌果蝇优化算法(Chaos Fruit Fly Optimization Algorithm,CFOA),即在果蝇优化算法迭代寻优过程中得到的每一代最优位置增加混沌扰动,进行二次寻优,能够使种群跳出局部最优解,实现全局搜索。
1.3 CFOA-GRNN算法流程
GRNN隐含层神经元个数和网络连接权值基于训练数据,训练过程中需要设置的参数为光滑因子spread值,spread值越大,网络逼近过程越平滑,但误差也越大,诊断能力降低;spread值越小,网络逼近能力越强,但逼近过程就越不平滑,易出现过拟合,降低了网络的泛化能力。因此,spread值的确定成为建立诊断效果优良的GRNN模型的首要任务。利用CFOA对GRNN迭代寻优,能够在短时间内找到最优的spread值,避免主观取值的盲目性。CFOA-GRNN算法流程如下:
(1)设置果蝇优化算法最大迭代次数Maxgen、种群规模、混沌遍历次数,并赋予果蝇群体随机初始位置(,);
(2)随机赋予果蝇个体飞行方向和距离;
()=+2-
(4)
()=+2-
(5)
式中:表示飞行步长;表示(0,1)之间的随机数;=1,2…,;
(3)计算果蝇个体位置与原点的距离()和对应的味道浓度判定值();

(6)
()=1()
(7)
(4)依次把所有果蝇个体对应的()作为光滑因子,利用训练样本建立GRNN诊断模型,把测试样本数据输入网络进行诊断,把网络的实际输出与理想值的RMSE作为味道浓度函数,则最小值对应的坐标即为该代种群的最优个体位置:
[,]=min
(8)
若为第1代种群,则其他个体全部飞往该位置,更新种群坐标:
=
(9)
=
(10)
=
(11)
若为第2代及以后的种群,则将得到的与上一代比较,若<,则按照上式更新种群坐标;
(5)对得到的最优坐标增加混沌扰动,按照式(1)—式(3)的方法得到混沌优化后的坐标(′,′),再执行步骤(3)、(4)得到对应的味道浓度函数值′,并与比较,若′<,则更新种群最优坐标:
=′
(12)
=′
(13)
=′
(14)
混沌迭代遍历次;
(6)得到新的果蝇种群坐标后,进行下一代寻优,重复执行步骤(2)—(5),直到达到最大迭代次数Maxgen,寻优结束,得到的最优坐标对应的味道浓度判定值即为GRNN模型的最优光滑因子。
2 特征提取
2.1 时域统计特征
从齿轮箱采集到的通常为时域振动信号,因此通过时域分析得到信号的时域统计特征较为直接简便。时域统计特征分为有量纲特征和无量纲特征。有量纲特征包括峰值、均值、均方根值和方差等;无量纲特征包括峭度指标、波形指标、峰值指标、裕度指标和脉冲指标等。无量纲特征相比前者具有一定通用性,针对不同的设备,适用于同一个无量纲参数值。为保证特征参数的适用性,选用5个无量纲参数作为信号时域特征,对于离散振动信号序列,,,…,,其特征参数公式为
峭度指标:

(15)
波形指标:
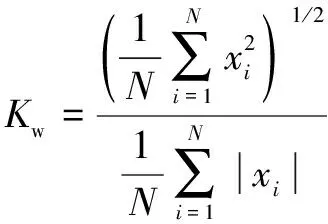
(16)
峰值指标:
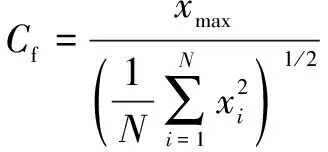
(17)
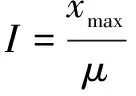
裕度指标:

(18)
脉冲指标:
(19)
式中:表示信号的峰值;表示信号的均值;表示信号的标准差。
2.2 频域能量特征
小波包变换(Wavelet Packet Transform,WPT)是在小波变换基础上发展和改进而来的一种信号时频域分析方法,将小波变换中没有细分的高频段也进行分解,有效解决小波变换中高频段分辨率较差的问题。齿轮箱正常信号和故障信号经小波包分解后,各频带的能量分布会有不同,因此可以选择各频带的能量作为信号频域特征。
对信号做层小波包分解,对最末层的小波系数进行重构,得到重构信号(=0,1,…,2-1),对应的频带能量为

(20)
式中:(=1,2,…,)表示离散值。
2.3 特征量选取
时域统计特征和频域能量特征分别从不同角度反映了齿轮箱振动状态。为充分利用从信号中获取的信息,提高故障诊断的效率,将两种特征量相结合,得到振动信号的时-频域混合特征向量=[,,,,,0,1,…,(2-1)],将作为神经网络的输入。
3 应用与结果分析
3.1 振动信号采集
文中的振动信号来源于本文作者所在研究团队搭建的电封闭行星齿轮箱故障诊断实验台,如图2所示。通过向控制柜输入命令可以设定电动机输入转速和发电机负载扭矩,实现齿轮箱在不同工况下的运转。齿轮箱外壳安装有加速度传感器,采样频率为8 192 Hz,可以采集实验台运转时齿轮箱的振动信号。
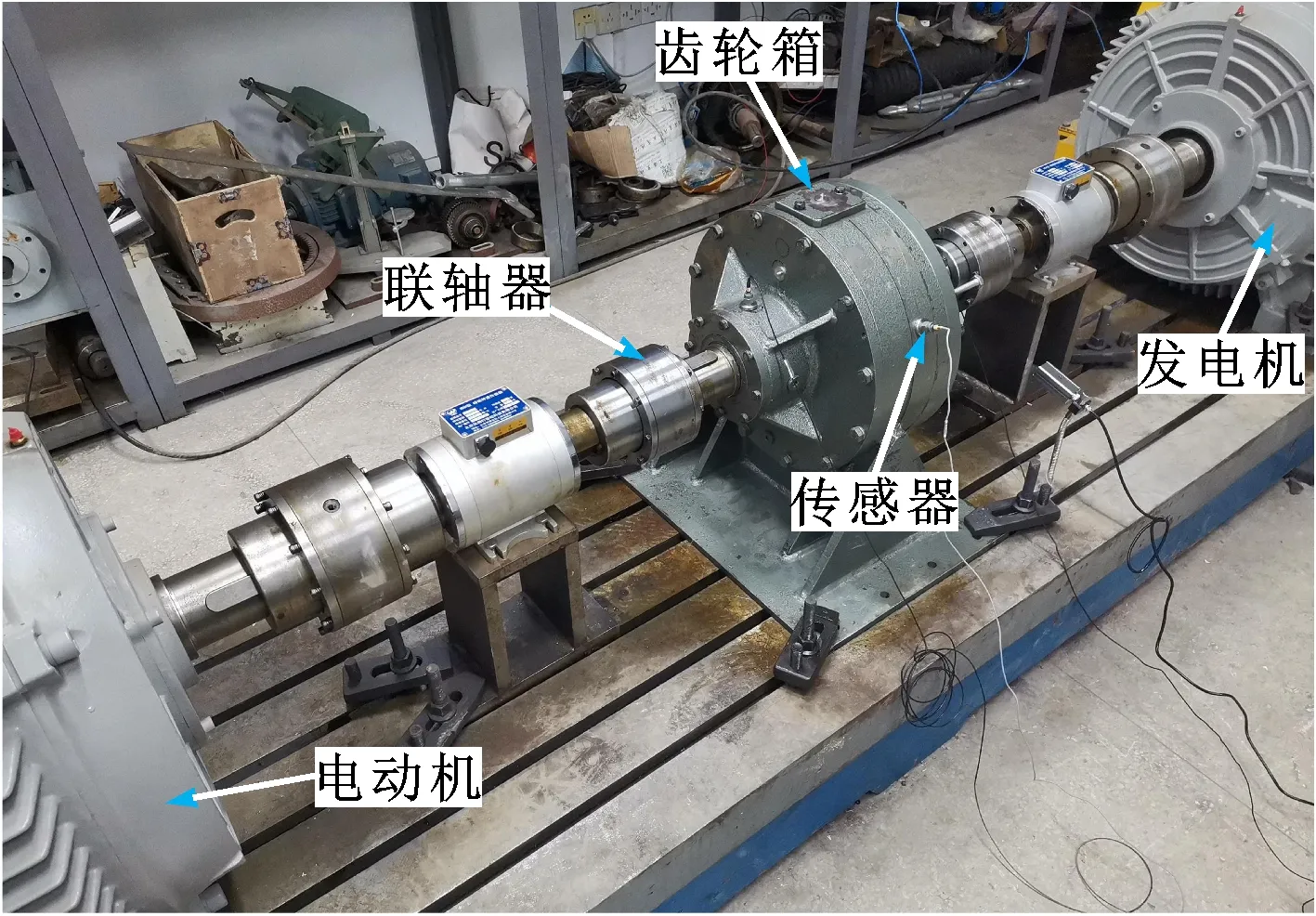
图2 齿轮箱故障诊断实验台
齿轮箱内部为2K-H行星齿轮传动系统,行星轮分为正常、断齿故障和点蚀故障3种类型,如图3所示。通过更换不同类型行星轮进行信号采集,可获取齿轮箱不同状态下的振动信号。

图3 3种故障类型行星轮
3.2 建立CFOA-GRNN诊断模型
3.2.1 数据预处理
利用实验台对齿轮箱正常、断齿故障、点蚀故障3种状态各采集80组振动信号。为提高故障诊断模型对齿轮箱不同工况的适应性,每种状态均采集了150、200 r/min两种输入转速和100、200 N·m两种负载扭矩对应的4种工况组合下的信号。
由于传感器采集信号时会受到干扰,需要进行降噪处理,本文作者采用小波阈值降噪法处理信号。小波阈值降噪法首先对信号进行小波分解,因噪声信号一般包含在高频细节信号中,对分解后的高频系数进行阈值量化处理,再利用低频系数和量化处理后的高频系数进行信号重构。利用MATLAB软件wden函数可以实现信号的阈值降噪处理,经多次测试,选用sym8小波进行4层分解能够达到较好的降噪效果。图4所示为输入转速150 r/min、负载扭矩100 N·m工况下的断齿故障信号降噪处理前后的时域波形。可以看出:经降噪处理后,信号中干扰成分明显减少,有效波形更加明显。

图4 断齿故障信号降噪前后对比
经降噪处理后进行信号特征量的计算。在频域能量特征的计算中选择sym6小波进行3层小波包分解,获得信号8个频带的能量分布特征。图5所示为3种状态各一组数据经小波包分解后的能量占比对比,可以看出:齿轮箱不同状态下各频段能量分布有比较明显的差异。
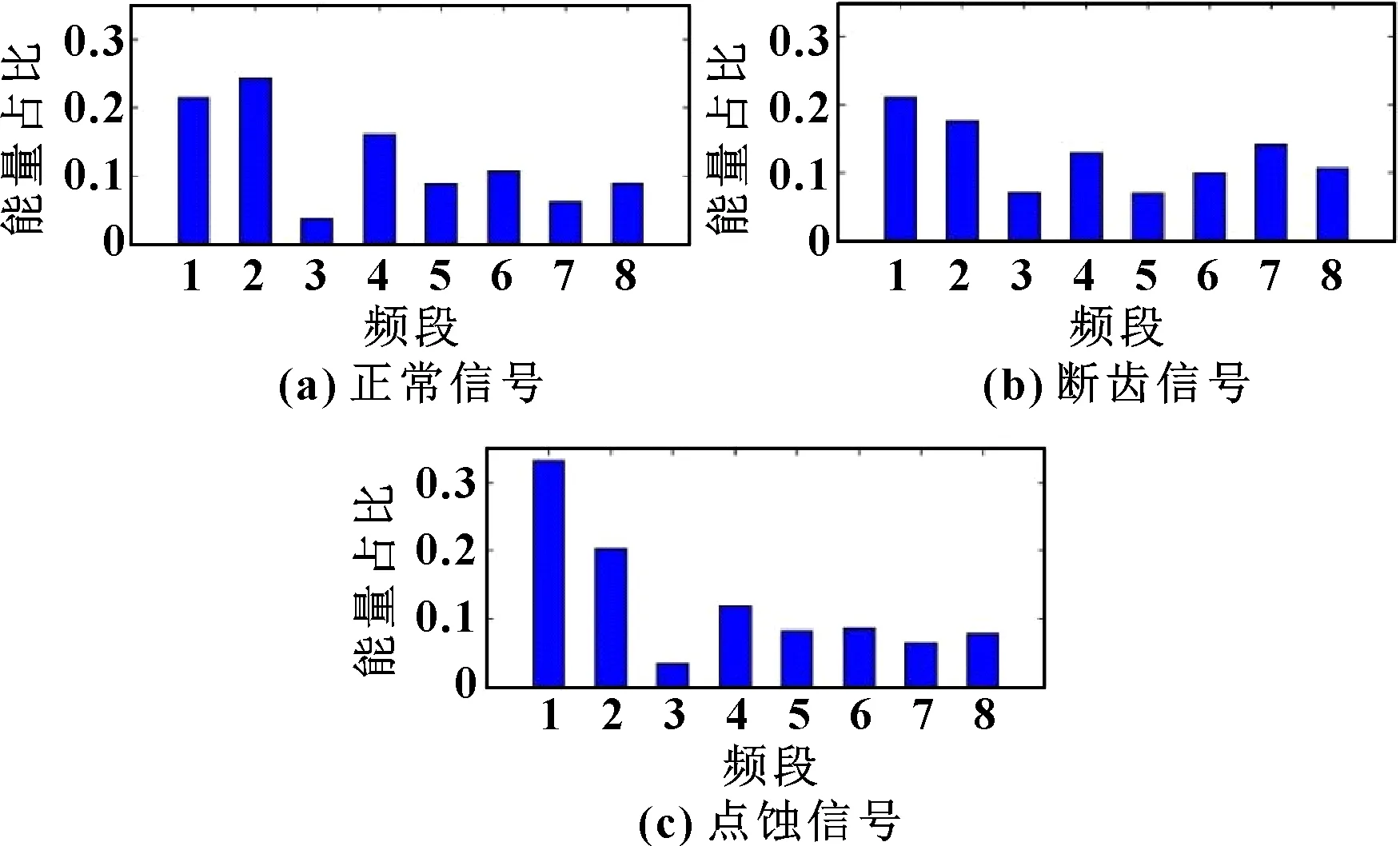
图5 3种信号频段能量占比
得到信号混合特征向量后,由于不同特征量具有不同的量纲,在数值上也会有较大差异,不利于神经网络的训练。因此,需要对特征向量进行归一化处理,转化为[0,1]区间内的数。数据归一化按下式进行:
(21)
式中:′表示归一化处理后的第个特征量;表示原始数据第个特征量;表示特征量中的最小值;表示特征量中的最大值。
3.2.2 诊断模型测试
利用交叉验证的思想,依次从3种状态的特征向量中随机取20组数据作为网络训练样本,其余60组作为测试样本;利用MATLAB编写程序,建立CFOA-GRNN故障诊断模型,进行多次样本测试,结果如表1所示。经计算可知测试组1~4的平均诊断成功率分别为95%、97.78%、96.11%、93.33%,最优Spread值分别为0.100 6、0.076 2、0.096 0、0.099 2。
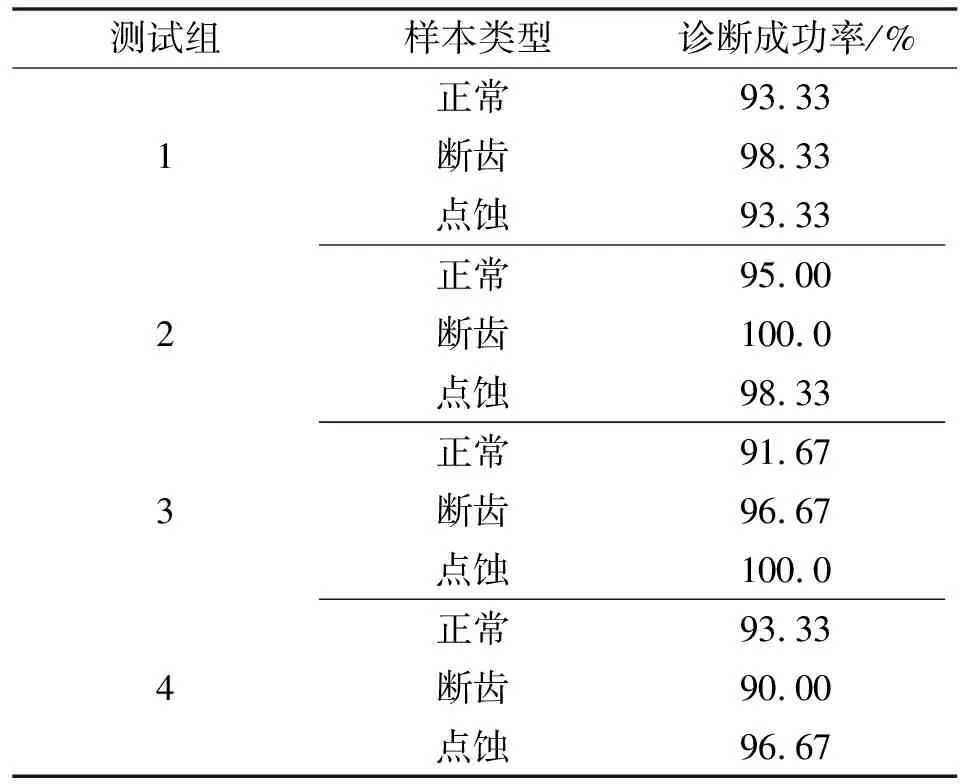
表1 诊断测试结果
表1中测试组4的网络输出如图6所示,3个输出值分别对应正常(0)、断齿(1)、点蚀(2)3种状态。从表1和图6可以看出:利用所建立的CFOA-GRNN故障诊断模型对不同样本进行诊断,成功率均达到90%以上,能够达到较好的诊断效果。
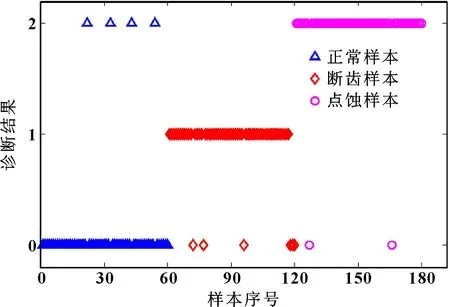
图6 测试组4的网络输出
3.3 模型对比
将所提模型与未引入混沌扰动的FOA-GRNN模型进行对比。两种模型最大迭代次数为40,果蝇种群个数设为10,步长为0.4,二者训练过程中诊断误差RMSE的变化趋势如图7所示。可以看出:FOA-GRNN经25次迭代达到最小误差,而CFOA-GRNN在第5次迭代就可达到最小误差,收敛速度更快。经对比可知,加入混沌扰动后的CFOA的寻优效果比传统的FOA好。
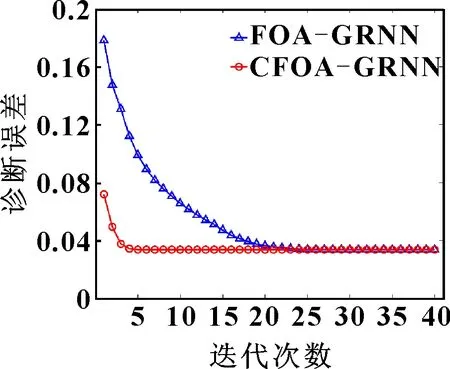
图7 两种模型训练误差对比
为进一步验证CFOA-GRNN模型的性能,将它与BPNN、GRNN进行对比。BPNN模型隐层节点数设为10,GRNN模型预设光滑因子值为0.15。3种模型均进行4次不同样本的测试,结果如表2所示。可以看出:3种模型中,CFOA-GRNN平均诊断成功率最高、诊断性能最好。事实上,BPNN需要人为预设的隐层神经元个数、学习率、激活函数、训练函数等网络参数过多,受主观因素和初始设置影响较大,难以调试出适应不同样本的模型;GRNN只需设置一个参数光滑因子,但预设值具有一定盲目性,也难以确定最优参数。CFOA-GRNN有效解决了前两种模型存在的问题,能够在短时间内建立性能优良的故障诊断模型。

表2 不同模型诊断性能对比
4 总结
本文作者提出了一种基于行星齿轮箱振动信号时域统计特征和频域能量特征的混合特征提取方法和利用混沌果蝇优化算法寻最优参数的CFOA-GRNN故障诊断算法。通过行星齿轮箱实验台测得多种工况数据,对提出的方法进行应用测试,达到了比较理想的故障诊断效果。经对比不同模型发现,所提出的模型相比BPNN、GRNN、FOA-GRNN模型,具有参数设置简便、主观影响小、寻优速度快、诊断正确率高等优势,在行星齿轮箱典型故障诊断中具有较好的实用性。
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
学苑创造·A版(2022年3期)2022-03-29
今日自动化(2022年1期)2022-03-07
科学与生活(2021年6期)2021-09-10
科学家(2021年24期)2021-04-25
花火彩版B(2020年5期)2020-09-10
福建基础教育研究(2019年2期)2019-09-10
学苑创造·A版(2019年6期)2019-07-11
福建基础教育研究(2019年2期)2019-05-28
电脑知识与技术(2016年13期)2016-06-29
