面向海洋节能边缘计算的任务卸载研究*
2022-09-21 08:36蒋欣秀杨志军丁洪伟
计算机工程与科学 2022年9期
蒋欣秀,常 俊,李 波,杨志军,丁洪伟
(云南大学信息学院,云南 昆明 650500)
1 引言
随着全球智能化的发展,大量智能设备已经广泛应用于各个领域,深刻推动了智能产业的发展[1],这有助于智能物联网从陆地扩展到海洋区域。海洋通信网络是未来海洋信息智慧网络的重要组成部分,海洋信息传输以及海上综合业务的开展产生了大量需要传输和处理的数据,对海洋通信网络提出了低时延、高可靠的服务需求。而新一代移动边缘计算MEC(Mobile Edge Computing)技术将数据处理中心下沉至网络边缘,提供就近的数据处理和存储服务,实现了高效的海上通信[2]。但是,爆炸式增长的网络流量及能量消耗使MEC的局限性也日益凸显。如何利用有限的通信资源和计算资源实现低成本、低时延和高可靠的海上网络通信成为一种挑战。
为了应对上述挑战,国内外研究人员进行了大量的研究。在任务卸载策略方面,文献[3]引入了一种面向海上的移动协同边缘计算卸载方案,采用改进的协同算法来提高卸载效率,克服海洋环境复杂和通信成本高的困难,但是该计算卸载方案只考虑了计算资源的状态,没有考虑通信资源的约束;Yang等[4]研究了具有能耗-延迟权衡的海上通信网络动态卸载问题,提出了一种两阶段联合最优卸载方案,第一阶段船舶用户VU(Vessel User)根据自身计算资源的大小及任务紧急程度决定是否将任务卸载至边缘云,第二阶段提出边缘云与中心云的卸载策略,实现计算资源的有效分配,而该任务卸载方案在2个阶段进行传输,使得任务重复传输,造成资源浪费;文献[5]基于正交频分复用技术的无线传感器网络,建立了基于各子载波发射功率和各船舶卸载时间的联合优化框架,指挥船作为边缘服务器接收船舶卸载的任务,但随着船舶数量的增加,能耗和时延明显增加。在模型建立方面,Yang等[6]考虑了海上MEC网络的计算任务卸载,使得船舶和码头的能耗和任务完成时间的加权和最小,为了减少设备的执行时延和能耗,提出了一种基于改进的匈牙利算法的海上网络多船计算卸载方法,用于实现多船、多通道和多边缘服务器之间的最佳匹配,然而在为船舶与MEC服务器的通信建模时,没有考虑任务的回传会受到海洋复杂环境的影响;文献[7]提出了移动边缘通信、计算和缓存技术,通过缓存策略避免任务的重复传输,减少流量的冗余,但引入无人机作为移动数据中心,使得移动云在计算资源、通信资源和能源资源方面受限,不能准确反映海域的复杂情况;文献[8]提出一种空间综合网络体系结构,基于深度强化学习解决联合通信和计算资源的卸载决策问题,提高了通信效率和计算效率,但深度强化学习需要强大的算力支撑,而海洋场景的资源是受限的。
以上研究虽然一定程度上实现了海上网络通信方案的计算资源和通信资源优化配置,但仍然存在2个问题:(1)文献[3-5]虽然围绕着时延和能耗对海上网络进行卸载优化,但在减少全局延迟和能耗方面存在重复传输、缺少约束等问题,造成了资源浪费。(2)文献[5-8]只考虑了计算资源和通信资源的优化配置,在模型构建方面没考虑海洋场景通信环境的恶劣以及在能量消耗方面没考虑利用可再生能源弥补。
针对上述问题,考虑到能耗和时延要求,本文提出了一种基于混合能量供应的移动边缘计算卸载方案。在该方案中,MEC服务器集成了混合电源和混合接入点HAP(Hybrid Access Point),混合电源从电网和可再生能源中获取电能保证边缘计算系统能够可靠运行,混合接入点能够实现向所有船舶用户广播射频RF(Radio Frequency)信号和接收船舶用户卸载任务的功能。整个方案联合能量收集方法对时延和能耗进行优化,将任务卸载问题分解为用户执行任务和MEC服务器执行任务的时延和能耗最小化问题。最后通过降维优化和改进的鲸鱼优化算法来解决该优化问题。仿真结果表明,本文方案与基本海上通信网络优化的方案相比有更低的执行总代价,进一步证明了所提方案的有效性。
2 系统模型
2.1 总体模型
混合能量供应的移动边缘计算模型如图1所示。该模型包括1个可获得可再生能源和电网能源的混合电源、1个MEC服务器、1个单天线混合接入点HAP和N个单天线的船舶用户VU。其中,MEC服务器集成了混合电源和HAP,混合电源为整个系统提供能量,HAP向所有VUs广播射频信号,每个VU集成了RF转换器和1个可充电电池,VUs可以使用转换模块将射频信号转化为电能,为本地计算或卸载传输提供能量,MEC服务器通过HAP接收VUs卸载任务,完成任务计算后,将计算结果返回给VUs。
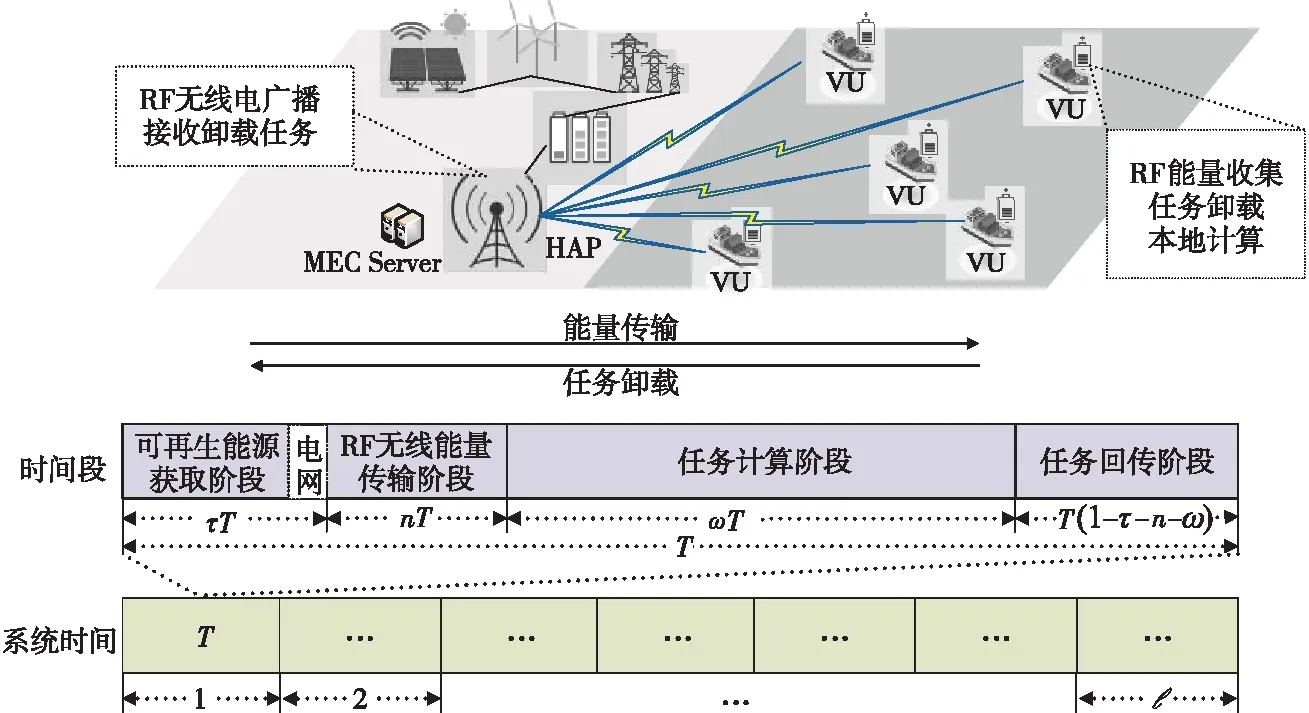
Figure 1 Mobile edge computing model with hybrid energy supply图1 混合能量供应的移动边缘计算模型
如图1所示,本文考虑了无线能量传输和无线信息传输,采用在每个时间段T中先获取能量后处理任务的方式以延长设备寿命,整个系统时间内有l个时间段(时长为T),在每个时间段均由可再生能源获取阶段(时长为τT)、RF无限能量传输阶段(时长为nT)、任务计算阶段(时长为ωT)和任务回传阶段(时长为qT)组成,其中,τ,n,ω,q∈[0,1],且τ+n+ω+q=1。因此,混合电源在τT时间段内先收集可再生能源,但由于可再生能源的可变性,本文将电力电网作为互补能源,以保证服务的连续性;当MEC服务器获得能源之后在nT时间段内开始广播射频信号;VUs接收到射频信号并转化为能量之后,进入任务计算阶段,在时间段ωT内执行任务计算操作,采用τi=(Di,αi)表示VUi∈{VU1,VU2,…,VUK}的计算任务且假设任务可分割,其中,K表示船舶用户数量,Di表示计算任务τi的输入计算数据大小(单位为bit),αi表示平均计算密度(单位为cycles/bit)。VUi可以在本地完成计算任务也可以卸载至MEC服务器完成计算任务,若任务卸载至MEC服务器,采用μi=(μ1,μ2,…,μK)表示本地计算数据量与其待处理的数据总量之比,任务完成之后,通过HAP将结果返回至VUs。
2.2 计算模型
2.2.1 本地执行模型
若VUi决定在本地执行计算任务τi,计算过程只与VUi的CPU计算能力有关,VUi的设备不同,其计算能力也不同,但VUi的设备可以采用动态频率电压调节技术[9]调节设备的CPU最佳频率,使得本地能耗降至最低。VUi本地执行计算任务所需时间如式(1)所示:
(1)

VUi在本地执行计算任务所消耗的能量如式(2)所示:
(2)

2.2.2 卸载执行模型

(3)
(4)

(5)
(6)
MEC服务器处理VUi卸载数据所需的时延和能耗分别如式(7)和式(8)所示:
(7)
(8)


(9)
(10)
2.2.3 执行代价模型
根据前文所述,本文以时延和能耗最小化为目标建立代价函数。由于船舶用户的任务可以同时在本地设备和边缘服务器上处理,VUi执行总时延为本地执行部分总时延与卸载执行部分总时延中的最大值,如式(11)所示:
(11)
VUi执行任务的能耗如式(12)所示:
(12)
因此,将执行代价定义为式(13)所示:
(13)
其中,m为VUi任务对时延和能耗的偏好系数。
2.3 能量收集模型
2.3.1 可再生能量收集
本文提出了一种可再生能源驱动的边缘计算方案,旨在最大限度地减少碳排放,但可再生能源的可变性和间歇性给能源管理带来了挑战[10],因此需要使用公用电网为其提供有效的电力保障,形成能源供应微电网,微电网可确保MEC服务器在无线能量传输阶段开始时电力存储量为Emax。MEC服务器将收集的可再生能源存储于电池中,若在每个时间段的能量收集阶段电量小于Emax时,将触发电力电网系统作为其补充能量。本文考虑的可再生能源由风能和太阳能构成。
(1)太阳能能源。

(14)
(2)风能能源。

Ewind(t)=PwindτT
(15)
(16)

Bcecn(t+1)=Eharvest(t)+Esup(t)-E(t)
(17)

2.3.2 射频能量收集
MEC服务器获取能量之后通过HAP广播RF信号,VUi在时间段T开始时获得RF无线能量[13],根据Friis公式,将其表示为式(18)所示:
(18)


(19)
当任务处理完后,VUi的电池状态量更新如式(20)所示:
(20)
因此,本文模型由可再生能源供应的MEC服务器和由无线传输能量供应的VUs组成,其动态能量供应算法如算法1所示:
算法1动态能量供应算法

输出:Eharvest(t),Elocal,i(t)。
1. 初始化时间段数量l;
2.fort=1 to ldo
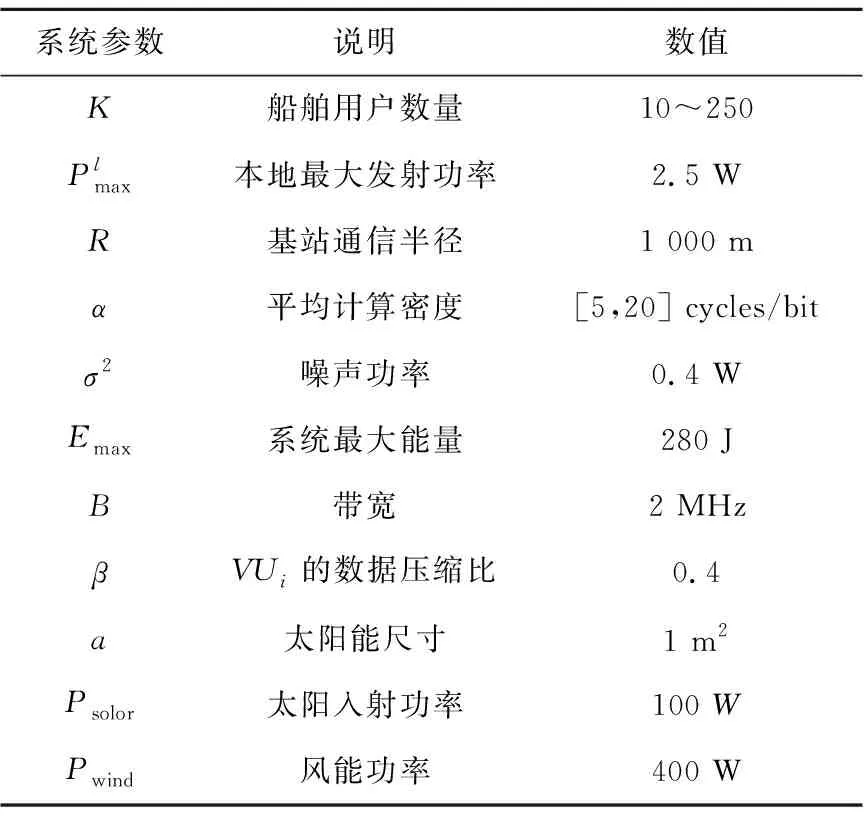
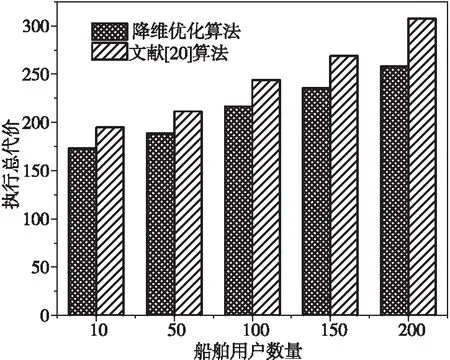
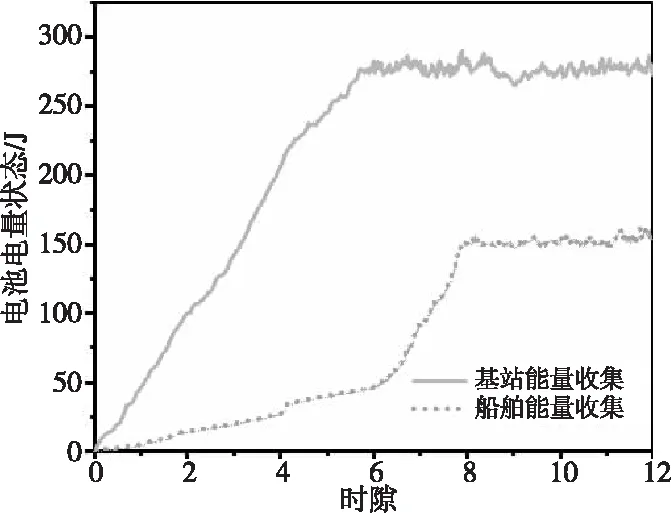
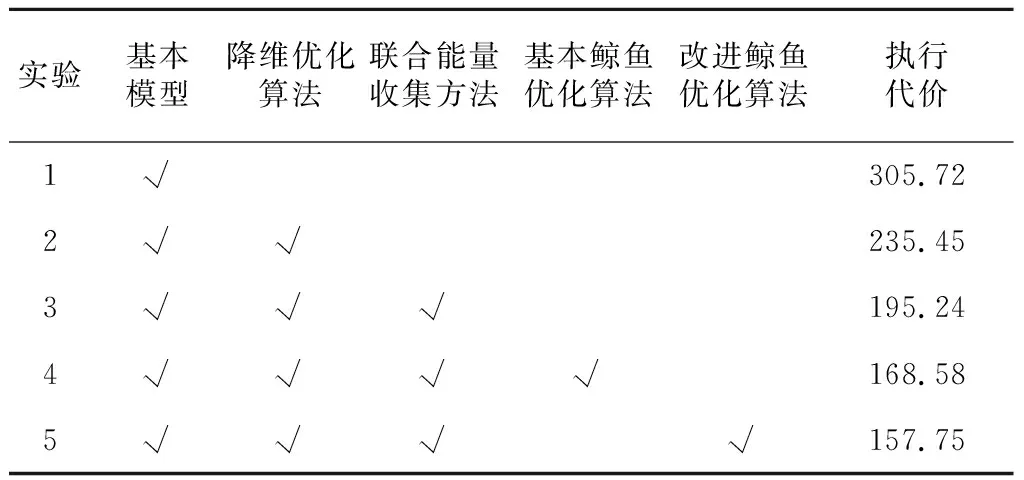
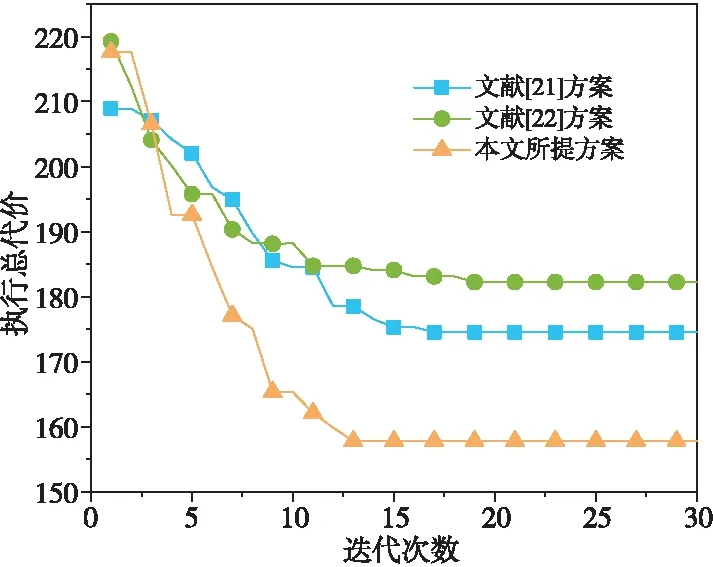
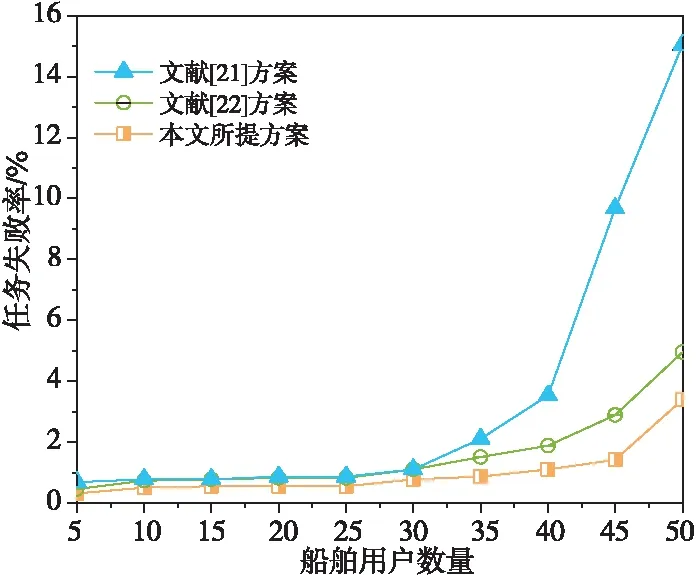
4.ifEharvest(t) 5.Eharvest(t)=Eharvest(t)+Esup(t); 6.else 7.Eharvest(t)=Emax; 8.endif 9. 利用式(17)更新MEC服务器的电池状态; 13. 利用式(20)更新VUs的电池状态; 14.endif 15.endfor 根据优化部分变量引理[14]可知先优化一部分变量再优化另一部分变量可以达到优化函数的目的,因此本文将原始执行代价问题转化为一维优化问题进行求解。 引理1 (21) 利用引理1可将原始执行代价最小化分解为能量最小化问题和时延最小化问题,以时延和能量最小化为目标依次优化本地计算频率、本地发射功率和数据卸载比例,使得系统能效最大化。 为了延长电池寿命,且所收集的能量可以充分利用,在保证VUi执行时延的同时最小化整体能耗,则能量最小化问题可形式化表示为式(22)所示: C4:0≤μi≤1 (22) 针对复杂的海上通信条件及敏感的时延要求,本文通过使用有限的能量资源尽可能优化执行任务的时延。该时延最小化问题可形式化表示如式(23)所示: C4,C5,C6 (23) (24) 4.2.1 可行域优化 (25) 由C1可得出式(26): (26) 根据C3和C5可有式(27): (27) 当: (28) 时,可得出: (29) 将式(24)和式(29)代入P1,将三维问题P1简化为如式(30)所示的二维问题P3: C10:μmin≤μi≤μmax C2,C5 (30) (31) 4.2.2 发射功率求解 (32) (33) □ 由于式(32)存在唯一极值,因此可将约束集合的极值与式(32)的极值进行比较,获得最佳功率。然而关于发射功率的约束下限值由C1、C3和C5联合决定,首先,根据C3和C5获得如式(34)所示的其中一个约束的下限值: (34) 再根据约束C1求解另一个约束极值,如式(35)所示: (35) 由于约束存在耦合关系,可利用条件缩放方法得出式(36): (36) 则有式(37): (37) 可将式(35)重写为式(38): (38) 则可以得到约束上限值,如式(39)所示: (39) 根据式(32)、式(34)、式(39)和C5可得出最佳发射功率闭合表达式,如式(40)所示: (40) 根据式(40),P3可化简为式(41)所示: P4: minE(μi) s.t.C10:μmin≤μi≤μmax (41) 其中,E(μi)如式(42)所示: (42) P4为一维约束优化问题,以能耗和时延最小化为目标,则执行代价函数如式(43)所示: s.t.C10:μmin≤μi≤μmax C11:T(μi)≤ωT C12:E(μi)≤Emax (43) 为了获得最优的数据卸载比,根据式(43)需要对卸载数据比在多约束条件下进行寻优,本文引入一种改进的鲸鱼优化算法对执行代价函数进行迭代。 4.3.1 基本鲸鱼优化算法 鲸鱼优化算法WOA(Whale Optimization Algorithm)是一种智能仿生算法[15],该算法基于座头鲸的捕猎行为,将目标问题规划为包围猎物、搜索猎物和螺旋气泡网捕食3个过程。每只座头鲸位置代表一个可行解,通过在解空间中不断更新鲸鱼的位置,最终可以获得全局最优解。算法的参数映射如表1所示。 Table 1 Parameter mapping (1)搜索猎物。 依据鲸鱼的游走机制,算法在搜索猎物阶段采用鱼群随机性位置更新的方法,使随机搜索具有全局寻优的能力,当|A|>1时,从当前种群中随机选择鲸的位置向量Xrand进行更新,面向全局搜索合适的猎物,其位置更新公式如式(44)和式(45)所示: D=C·Xrand-X(z) (44) X(z+1)=Xrand-A·D (45) A=2a·r1-a (46) C=2·r2 (47) 其中,z代表当前迭代次数,X(z)是当前迭代的位置向量,X(z+1)为下次迭代的位置向量,A和C是向量系数,r1和r2为由[0,1]的随机数构成的向量。随着迭代次数的增加,a呈线性递减,A随之减小,当|A|≤1时,算法由搜索阶段进入到包围猎物阶段。 (2)包围猎物。 该阶段A为由[-1,1]的随机数构成的向量,假设当前的鱼群中适应度值最优的解是目标猎物位置,座头鲸在迭代过程中向最佳解的位置进行更新,通过逐步包围收缩,接近目标猎物,该行为可表示为式(48)和式(49)所示: D=C·X*(z)-X(z) (48) X(z+1)=X*(z)-A·D (49) (3)螺旋气泡网。 鲸鱼在捕食时通常边吐气泡边螺旋式上升游动,将猎物逼近海洋表面再进行捕猎,该行为可表示为式(50)和式(51)所示: D′=X*(z)-X(z) (50) X(z+1)=D′·ebl′·cos(2πl′)+X*(z) (51) 其中,b用于定义对数螺旋的形状,l′∈[-1,1]为随机数,D′是当前鲸的位置向量与目标猎物之间的位置向量之间的向量差。为了模拟鲸鱼同时进行螺旋气泡和包围收缩的狩猎行为,假设鲸鱼执行任意一个行为的概率为50%,则鲸鱼位置更新公式如式(52)所示: (52) 其中,p是[0,1]的随机数。 4.3.2 改进的鲸鱼优化算法 基本WOA中,向量系数A对群体寻优有重要影响,利用WOA迭代计算最优数据卸载比例时,包围阈值恒定为1,因此,在迭代后期座头鲸没有根据式(45)进行寻优,容易陷入局部最优。针对这一问题,本文提出一种包围阈值自适应的改进鲸鱼优化算法ATWOA(Adaptive Threshold Whale Optimization Algorithm),包围阈值的计算公式如式(53)所示: (53) 其中,h(z)表示第z次迭代对应的包围阈值,记f(z)为第z次迭代时本文所提计算卸载方案的适应度值,若第z次迭代执行代价不比第z-1次的更优,则减小该座头鲸的包围阈值,扩大座头鲸位置选择范围,使得座头鲸有偏好地进行位置更新。本文所提优化数据卸载比的算法描述如算法2所示。 算法2数据卸载比的优化算法 输入:鲸鱼种群Xi(i=1,2,…,n),最大迭代次数Tmax。 输出:最佳搜索位置X*。 1. 计算每头座头鲸的执行代价(式(53)); 2.Whilez 3.for鲸鱼个体 4. 更新每个搜索变量的a,A,C,l′,p; 5.ifp<0.5 6.if|A|>h(t) 7. 随机选择一个搜索变量Xrand; 8. 通过式(45)更新当前搜索变量的位置; 9.elseif|A|≤h(t) 10. 通过式(49)更新当前搜索变量的位置; 11.endif 12.elseifp≥0.5 13.通过式(51)更新当前搜索变量的位置; 14.endif 15.endfor 16. 检查是否有搜索变量超出了搜索范围; 17. 计算所有座头鲸的执行代价(式(33)); 18. 更新X*的值; 19.z=z+1; 20.endwhile 为了验证本文提出的计算卸载方案的有效性和优越性,本文使用边缘计算模拟器EdgeCloudSim[16]进行实验仿真,EdgeCloudSim是一款针对特定边缘计算场景进行仿真的开源工具,提供了一个模块化的体系结构,主要由5个自定义模块组成,分别是移动模块、负载生成器模块、网络模块、边缘协调器模块和核心仿真模块。本文将混合能量供应的移动边缘计算模型载入核心仿真模块中,并将优化算法载入边缘协调模块中进行仿真。 仿真中设置一个船舶网络、一个边缘云设备并模拟20 min的真实场景。对于仿真场景参数参考文献[17]将每个船舶用户的处理速度设置为50 MIPS,将边缘云设备模拟为数据中心,其由4台虚拟主机组成,处理速度为1 000 MIPS,在初始化阶段,负载生成器模块根据泊松分布为每个船舶用户创建一组大小为1 000 KB的任务,此外,在仿真平台中,参考文献[18-20]定义不同的参数,如表2所示。 5.2.1 优化算法的比较 为了验证本文提出的降维优化算法的优越性,本节评估了在不同船舶用户数量的场景下,本文提 Table 2 Parameters setting 出的降维优化算法与文献[20]算法的性能,结果如图2所示。可以看出,随着VUs数量的增加,总执行代价呈增大的趋势,文献[20]算法执行代价变化较大,是由于该方案引入变量的理想化使得本地计算能力和发射功率没有达到最优值,而本文的降维优化算法在测试范围内均有较低的执行代价,说明了算法的可行性。 Figure 2 Total execution cost of different ship users图2 不同船舶用户数量的执行总代价 5.2.2 能量收集方法验证 为了验证本文提出的能量收集方法的有效性,在核心仿真模块中模拟了1 200个时隙中MEC服务器电池能量的状态和VUs存储能量的状态,结果如图3所示。在当前参数下,可以看出MEC服务器电池能量的状态稳定在第600个时隙附近,表明可再生能源在每个时间段开始时进行收集,在第600个时隙到达Emax,VUs的电池能量状态在第800个时隙达到稳定,表明在MEC服务器获得能量之后向VUs广播射频信号,VUs在第800个时隙达到了能量平衡。 Figure 3 Relationship between battery energy and time slot图3 电池能量与时隙的关系 5.2.3 改进算法比较 为了优化卸载数据比,本文改进了鲸鱼优化算法来对适应度函数进行寻优,如图4所示,随着种群数量的增加任务执行成本逐渐减小并趋于收敛,当ATWOA种群数量达到40以上时,执行总代价收敛于同一数值,比基本的WOA种群数量达到60个以上收敛更快,说明了改进算法寻优性能的提升。由于种群数量为40时,在迭代21次附近收敛,因此选取40个种群数量进行以下实验仿真。 Figure 4 Total execution costs of different population numbers图4 不同种群数量时的执行总代价 5.2.4 消融实验 本节在参数一定的情况下进行消融实验,实验结果取各实验仿真10次的平均值,结果如表3所示。实验1为基于EdgeCloudSim搭建的计算卸载基础框架,采用全部任务卸载方法对任务进行卸载。在实验1的基础上,实验2以能耗-时延权衡优化为目标,通过降维优化算法获得最优本地计算能力和发射功率,使得执行总代价有效降低22.9%。实验3在实验2的基础上联合能量收集方法进行优化,最终执行总代价降低17%。实验4基于实验3并采用基本鲸鱼优化算法获得任务卸载比例,最终执行总代价降低13.7%。实验5采用本文所提模型,通过改进鲸鱼优化算法使执行总代价降低了6.5%。 Table 3 Comparison of ablation results 5.2.5 不同方案的对比实验 为评估本文提出的计算卸载方案的性能,本节评估具有能量收集的资源分配方案WP-MEC(Wireless Powered Mobile Edge Computing)[21]和海上通信网络优化的方案ORMCN(Optimization Research of Maritime Communication Network)[22]与本文方案之间的差异,结果如图5所示。由图5可以看出,相较于其他方案,本文提出的计算卸载方案有较低的执行成本,随迭代次数的增加,其收敛到一定值,达到能耗-时延平衡,本文提出的计算卸载方案较之WP-MEC和ORMCN,执行成本分别降低13.4%和9.6%,这是由于本文采用了优化卸载比例的策略,提高了数据处理效率,同时联合可再生能源收集方法使得系统对能量的使用效率提高。 Figure 5 Total execution costs of different schemes图5 不同方案的执行总代价 图6给出了船舶用户数量对平均任务失败率的影响,当系统负载较轻时,计算任务的性能相似,本文提出的计算卸载方案在负载增加的时候表现出更好的性能,因其围绕着时延和能耗对任务卸载进行优化,能更好地平衡计算资源和通信资源。而ORMCN对海上通信资源的评估考虑不周,因其通信的不稳定,导致任务失败率较高,WP-MEC没有考虑到可再生资源存在不稳定性,导致任务在卸载过程中因为能量不足而出现丢失。 Figure 6 Task failure rates of different schemes图6 不同方案的任务失败率 考虑到MEC服务器和船舶用户的场景不同,本文提出了一种混合能量供应的边缘计算卸载模型,利用可再生能源为MEC服务器供应能量,采用电力电网为其补充能源,保证系统工作的连续性,VUs则考虑用无线RF传输提供能量。本文提出的计算卸载方案以能耗-时延权衡为目标,通过降维优化算法,将目标函数简化为关于卸载数据比的一维多约束问题,并通过优化鲸鱼算法得到模型的执行总代价。仿真结果表明,本文提出的计算卸载方案较之WP-MEC、ORMCN执行成本降低了13.4%和9.6%。在未来工作中,将会进一步考虑对电网能量供应进行计价,实现电网和MEC服务系统双方收益最大化。
3 问题形式化


3.1 能量最小化问题


3.2 时延最小化问题


4 问题求解
4.1 最佳本地计算频率
4.2 降维优化算法




4.3 卸载比例优化


5 实验仿真与结果分析
5.1 仿真实验环境
5.2 实验结果分析

6 结束语
猜你喜欢
幼儿100(2022年41期)2022-11-24数学大王·趣味逻辑(2020年9期)2020-09-06通信电源技术(2020年8期)2020-07-21小天使·二年级语数英综合(2019年4期)2019-10-06电子制作(2019年23期)2019-02-23动漫星空(2018年4期)2018-10-26海峡姐妹(2017年12期)2018-01-31语文世界(初中版)(2017年5期)2017-06-22作文与考试·初中版(2017年12期)2017-04-19现代防御技术(2016年1期)2016-06-01