
虚拟信息素在群体机器人目标搜索中的应用
2022-09-22 14:39郑超学
机械设计与制造 2022年9期
郑超学,雷 斌,韩 晓
(1.武汉科技大学机械自动化学院,湖北 武汉 430081;2.武汉科技大学机器人与智能系统研究院,湖北 武汉 430081)
1 引言
目标搜索和路径规划是指在已知或未知的环境中,移动机器人能自主地搜寻到目标位置,并找到从起点到终点的最短路径。在空间探测、恶劣环境搜救等场景中,使用单个移动机器人作业不仅存在工作效率有限、续航能力差等问题,还存在依赖单个机器人的性能、系统抗干扰能力差的问题。
相比于功能强大的复杂单机器人,群体机器人具有冗余性、同构性、简单性以及分布式的特点[1],硬件复杂度较低,设计相对简单,消除了单点故障,提升了系统的鲁棒性和灵活性,但同时增加了算法设计的复杂度。在目标搜索与路径规划领域,蚁群觅食行为给了相关研究者很好的启发。在仿生蚁群觅食行[2]的相关研究中,如何模拟蚁群信息素是一个难点,目前主要解决方案有气味或FRID 标签[3]等外部痕迹法、机器人通信渠道法[4]、布置的传感器网络法[5]、可展开的信标或机器人链[6]。文献[7]中将MSAPF算法与SRPSO 算法结合,通过仿真验证了算法在目标搜索与路径规划中的有效性。文献[8]通过采用最近邻搜索策略,结合两组蚂蚁相互协作的方式,提高了最优路径的搜索效率。文献[9]使用群体机器人分布式搜索算法结合FRID 标签在实现在未知环境中搜索目标物。文献[10]提出一种适用于移动机器人自组织网络的蚁群算法路由协议。文献[11]中对比了CPFA 和DDSA 两种蚁群机器人觅食算法在任务空间分布、有无障碍物和食物回报率三个方面的性能。此外,改进蚁群算法[12]在路径规划领域已有许多研究成果。
上述应用群体机器人在目标搜索和路径规划的算法中,相关研究大多处于理论推导和软件仿真阶段。在实际应用中,由于信息素痕迹难以实施和检测,通信通道会产生严重的自干扰,布置传感器网络具有很大的局限性,可展开的信标和机器人链当前实施难度很大。当前的主要问题是,如何模拟蚂蚁释放的信息素,给一群小型的简单机器人编程,使它们具备基本的运行功能和交互功能,进而可以用小型可编程的群体机器人作为实验载体,验证相关理论和算法的实用性与可靠性。
为解决此问题,在借鉴自然界中蚁群觅食的行为后,提出一种基于虚拟信息素的仿生蚁群目标搜索方案。首先,基于虚拟信息素,开发一种双向交互的红外线编码虚拟信息素系统,通过仿真和实验测试了虚拟信息素系统的可靠性;其次,设计制作出一种结构简单的双驱动轮式群体机器人来搭载上述虚拟信息素系统;最后,使用该群体机器人完成目标搜索和路径规划实验。实验结果表明,虚拟信息素系统能够模拟自然界的化学信息素,使仿生群体机器人经过协作搜索到目标物,群体机器人经过一定时间的运动之后,能够构建出一条从出发点到目标物的近似最短路径。
2 虚拟信息素系统开发
这里提出了一种用虚拟信息素系统来模拟自然界化学物质信息素的方案,虚拟信息素系统,如图1所示。
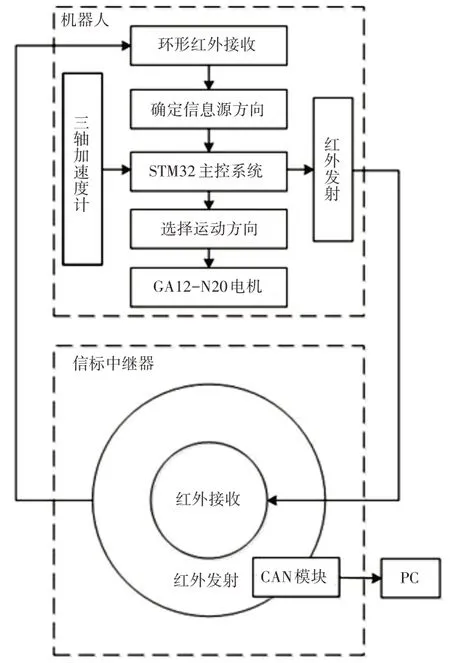
图1 虚拟信息素系统通讯示意图Fig.1 Communication Diagram of Virtual Pheromone System
该虚拟信息素系统由多个信标中继器、CAN模块和红外收发装置组成,各信标中继器能够独立模拟蚂蚁沉积的信息素,并将信息素传递给其他经过的蚂蚁,CAN模块用于采集所有信标中继器的数据,红外收发装置用于传递信息素。各信标中继器之间不能进行通信,将所有信标中继器的数据收集至PC端后,即可观察整个信息素系统的工作情况。
2.1 虚拟信息素
虚拟信息素是指机器人之间进行信息交互的一种介质,其本质是一种特定编码的红外线收发系统,实验过程中机器人通过该系统进行信息交互。与化学信息素不同,虚拟信息素将机器人转化为嵌入在环境中的分布式计算网格。该网格可以用来计算关于环境的非局部信息,例如最短路径和阻塞点,这些非局部信息对于每个机器人来说,在不同位置,不同时刻,从环境中获取的信息都是不一样的。将这种仿生技术应用于群体机器人中,并通过实验验证该技术可行性,进而可扩展到大型、异构的群体机器人。
2.2 目标搜索算法
模拟蚁群的觅食行为,设计了一种仿生群体智能搜索算法。蚂蚁在觅食过程中能够感知周围环境中的信息素浓度,并向信息素浓度高的方向移动,运动过程中蚂蚁只能沿正前方180°范围内的方向移动,并加强所经过路径上的信息素浓度,因此较多的蚂蚁会以更大概率选择信息素浓度高的路径运动,通过多次往返巢穴和食物,蚁群最终获得最短路径。
为使蚂蚁找到食物后能顺利返回巢穴,此处定义两种信息素,一种为从巢穴出发后释放的巢穴信息素,简称为H信息素,用于引导巢穴位置;另一种为找到食物后释放的食物信息素,以下简称为F信息素,用于引导食物位置。
为描述算法过程并简化模型,建立离散时间模型,各信标中继器可看做环境中的每一个信息素节点。设蚂蚁i在t时刻在环境中释放的信息素浓度τi(t) ∈(0,100),蚂蚁在远离巢穴的过程中,释放H信息素的浓度也会减小。
设蚂蚁每一步运动的距离相等,蚂蚁移动速度为v,设蚂蚁i运动步数为Si,蚂蚁每移动一步其释放信息素浓度减小σ,信息素节点j在t时刻的信息素浓度为τj(t),每间隔时间T就有一只蚂蚁从巢穴出发寻找食物,蚂蚁更新信息素的频率为f,环境中信息素挥发的速度为λ,E1表示蚂蚁的集合,E2表示信息素节点的集合,集合E1*表示信息素节点下一时刻可以选择传递信息素的蚂蚁集合,E2*表示蚂蚁下一时刻可以选择获取信息素浓度的节点的集合,则有E1*⊆E1,E2*⊆E2。蚂蚁的信息素更新方式为:

节点的信息素更新方式为:

蚂蚁在t时刻选择的下一步要前往的目标节点为:

在初始状态下,当第一只蚂蚁从巢穴出发寻找食物时,τ1(0)=100,τj(0)=0,j∈E。
τj(t+1)=0 时蚂蚁随机选择下一步的方向移动,在式(2)中,若{(τj(t) -λ/f),τj(t)},i∈E1*,j∈E2*中出现相等且最大元素,此时蚂蚁随机选择其中一个最大元素对应的节点方向移动。
仿生蚁群觅食的程序流程,如图2所示。蚂蚁在未知的环境中寻找食物,最初环境中没有任何信息素,第一只蚂蚁离开巢穴后随机游走寻找食物,并在游走过程中释放H信息素,随着蚂蚁远离巢穴,其释放的H信息素浓度也随之降低,环境中的节点能够记录信息素,经过的时间越长,节点记录的信息素浓度越低。经过时间T后,第二只蚂蚁离开巢穴寻找食物,首先蚂蚁搜索F信息素,然后再搜索H信息素,由于此时环境中没有F信息素,蚂蚁会朝着H信息素浓度较高的地方运动,同时第二只蚂蚁也会在环境中释放H信息素,第二只蚂蚁释放的H信息素会加强环境中被经过的节点信息素浓度。那么,对于距离越短的路径,经过的蚂蚁就会更多,信息素浓度也会高于其他路径,被其他蚂蚁选中的概率也越大,通过这种正反馈作用,蚁群在迭代中逐渐获得最短路径。
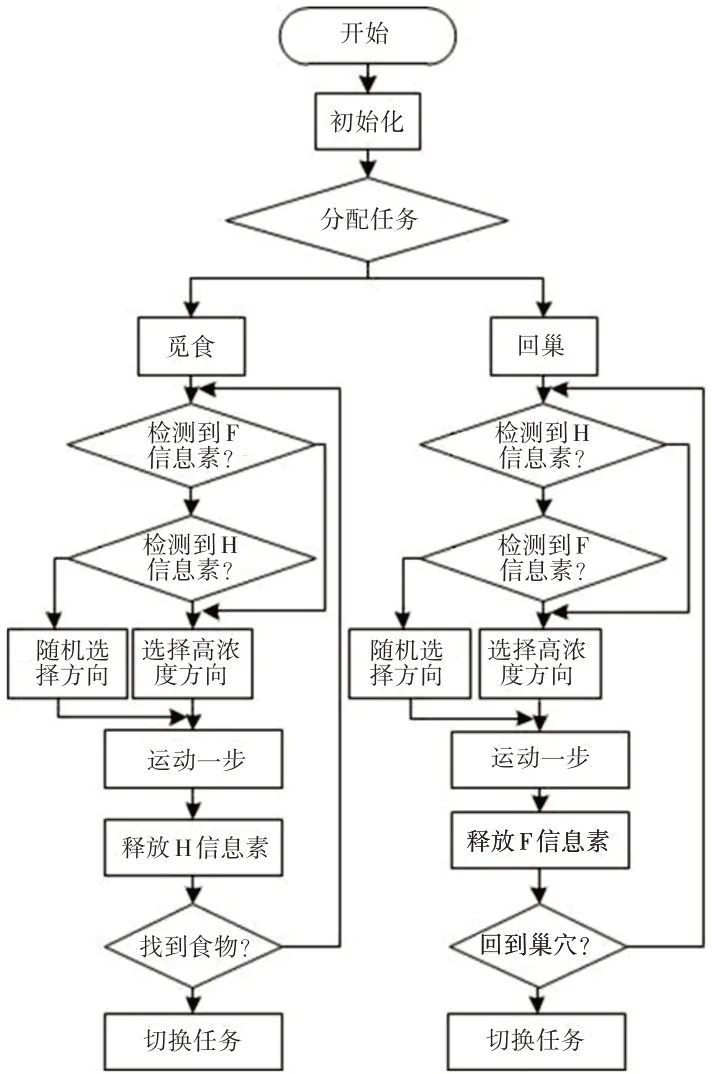
图2 觅食程序流程图Fig.2 Flow Chart of Foraging Procedure
3 仿生群体机器人实验平台设计
为了验证基于虚拟信息素的目标搜索算法的正确性和实用性,设计了一套实验平台,该实验平台主要由控制模块、虚拟信息素传递模块、数据收集模块和运动模块四个部分组成。
3.1 控制模块
控制模块采用的是100引脚的STM32F103VET6芯片,该芯片具有32 位Cortex-M3 内核,512K Flash,64K SRAM,并且该芯片还支持丰富的通讯方式,包括两个SPI,两个I2C,五个USART,一个USB,一个CAN,充分满足本设计中对于机器人通信的需求,并且还有利于制作调试和功能扩展。
3.2 虚拟信息素传递模块
机器人采用一种具备方向识别功能的红外收发模块来传递信息素,机器人和信标中继器都具备红外收发的功能,各接收和发射模块相互独立。机器人搭载均布八个红外接收管的红外接收装置,如图3(a)所示。机器人选择信息素浓度最大的方向运动。机器人底部搭载一个红外发射管,红外发射管在运动路径上释放信息素。这种虚拟信息素方案既能模拟自然界的信息素状况,又便于实施。
信标中继器采用一种双层圆锥结构的外壳,如图3(b)所示,内侧安装红外接收装置,接收机器人发射的虚拟信息素,外侧安装2个红外发射装置发射虚拟信息素,圆锥结构限制了虚拟信息素的收发范围,使机器人只能在以信标中继器中心为圆心、半径为310mm的范围内与信标中继器进行信息交互。
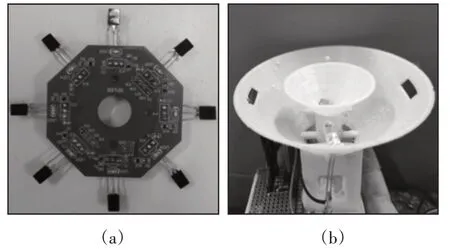
图3 信息素传递模块Fig.3 Pheromone Transfer Module
3.3 数据收集模块
每个中继器上串联CAN模块观测信息素系统的运行状况。CAN通讯协议可以挂载多个通讯节点,节点上的信号经过总线传输到PC端,可以通过中继器增强负载,因此使用CAN 模块收集虚拟信息素系统的数据满足设计要求。
3.4 运动模块
运动模块使用全钢精密微型齿轮的GA12-N20 减速马达,该减速马达使用铜质减速箱,尾部自带消火电容提高运动灵敏度。电机驱动采用L298N电机驱动芯片控制机器人减速马达,具备高压、大电流双全桥驱动,满足小型化、大电流的设计要求,运动模块其他部件通过3D打印制作。基于上述模块化设计的机器人外形呈圆柱形,直径约80mm,高度约70mm,如图4所示。
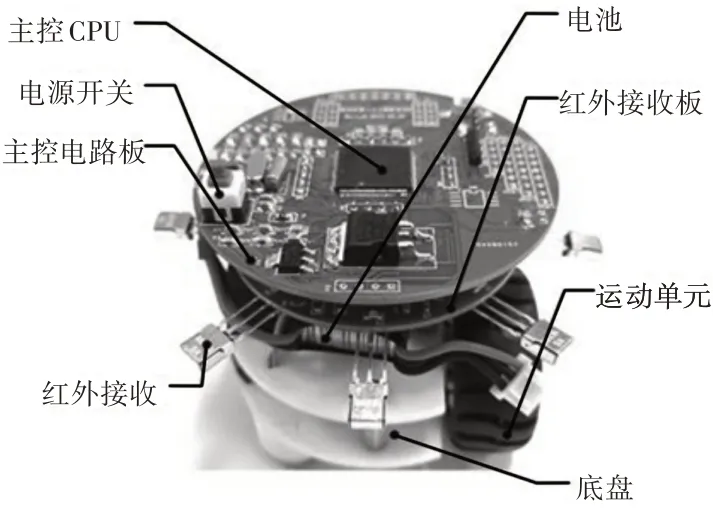
图4 机器人示意图Fig.4 Robot Schematic
4 仿生觅食与路径规划实验
实验环境由一块(1200×1200)mm 的钢化玻璃和16 个均匀分布的信标中继器组成,信标中继器粘贴在玻璃下表面,机器人在玻璃上表面运动。实验环境还包括群体机器人起点和目标物,假设机器人起点为蚁群的巢穴,目标物为需要搜索的食物。群体机器人的任务就是像蚂蚁寻找食物一样搜索目标,某个机器人在发现目标后,将目标位置通过虚拟信息素传递给其他机器人,如果经过一定时间后,从起点出发的机器人沿起点到目标之间的固定路线运动,那么群体机器人就完成了仿生蚁群的目标搜索与路径规划任务。
4.1 测试参数与指标
4.1.1 测试参数
完成实验环境构建后,此处确定几个相关测试参数。
(1)机器人密度:机器人的数量除以实验区域面积,得出机器人平均密度,在实验中使用3个机器人,因此机器人的平均密度为2.083个/m2;
(2)起点与目标之间距离:将起点与目标之间的距离无量纲化,定义距离等于起点与目标之间的长度距离除以测试区域平均边界距离。起点与目标分别位于正方形测试环境的对角点,因此起点与目标之间的距离为141.4%;
(3)运行时间:将机器人的运行时间无量纲化,定义运行时间等于机器人运动的步数。通过硬件编程设置机器人每一步都以相同速度运动一个自身尺寸的长度距离,在MATLAB仿真中,一个机器人穿越起点到目标之间25次后,可以遍历整个地图环境,机器人的直径为80mm,因此,机器人遍历整个地图环境需要530步;
(4)机器人通信半径:将机器人通信半径无量纲化,定义通信半径=虚拟信息素发射范围半径/机器人半径。在硬件设计中,群体机器人与信标中继器之间的通信半径直接影响机器人的搜索效率,在(1200×1200)mm的环境中均匀布置了16个信标中继器,信标中继器之间距离为300mm,为了使每个机器人在搜索过程中至少能同2个信标中继器进行虚拟信息素交互,在硬件编程中设置机器人通信半径为7.5。
4.1.2 测试指标
为了衡量基于虚拟信息素的目标搜索算法的性能,下面将使用两个测试指标:
(1)搜索到目标物的机器人数量:在经过530 步运行之后,整个群体中搜索到目标物机器人的数量及所占比例,即搜索成功率;
(2)虚拟信息素系统运行状况:虚拟信息素系统的运行状况反映了机器人构建路径的结果,通过上位机在PC端查看每个中继器的运行状况,即可得出整个群体机器人构建路径的可靠性和效率。
4.2 实验结果
在1200mm*1200mm 的测试环境中,使用三个机器人搜索目标,起点位于左下角,目标位于右上角,环境中无障碍物。在机器人找到目标或越过环境边界后,就将机器人放置在起点重新启动,每个机器人的总运动时间为530步长。
机器人运行的“步数-距离”关系,如图5所示。实验过程中机器人1重启了5次,机器人2和机器人3重启了3次。机器人1在搜索过程中的随机性最大,越过实验边界4次,并且搜索范围相对较小,这是由于在前期环境中没有任何信息素的情况下,搜索随机性很大,导致机器人在某个信标周围来回运动或越过边界,当环境中已经存在信息素后,机器人的搜索范围会进一步扩大,搜索速度加快。从图5可看出,在经过530步运行之后,机器人共出动11次,共有5次搜索到了目标,即有45%的机器人能够搜索到目标,并且,越到后期搜索的成功率越高。而在随机游走的实验中,出动相等数量的机器人只有1次能够搜索到目标,显然基于虚拟信息素的仿生觅食方案性能远远优于随机游走。
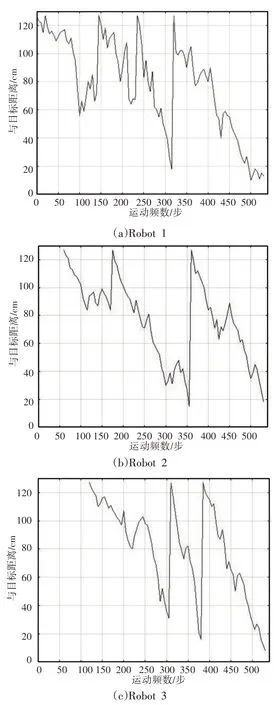
图5 机器人运行的“步数-距离”关系图Fig.5 “Step-Distance”Diagram of Robot Operation
群体机器人在10步、100步、300步和500步时的运行状态如图6所示。在搜索过程中,前期会存在一些随机性,机器人会以类似漫游的状态在环境中搜索目标,但是随着虚拟信息素系统迭代次数增加,在后期的搜索中机器人会表现出很强的目标性,机器人不会再运动到距离目标很远的位置了。经历530步之后,虚拟信息素系统工作状况,如表1所示。起点位于第一行第一列,目标位于第四行第四列,从系统运行状况来看,从左下角到右上角信息素呈现明显的递减趋势,而左上角和右下角几乎没有检测到相关信息素,这说明整个虚拟信息素系统经过迭代后,机器人的运行路径趋于稳定,最短路径的收敛状况良好。
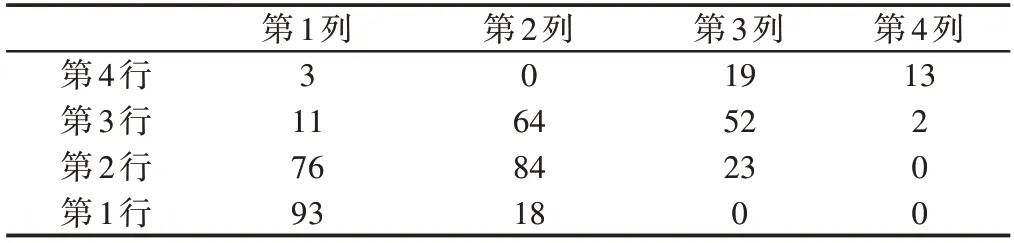
表1 虚拟信息素系统运行状况Tab.1 Virtual Pheromone System Operation
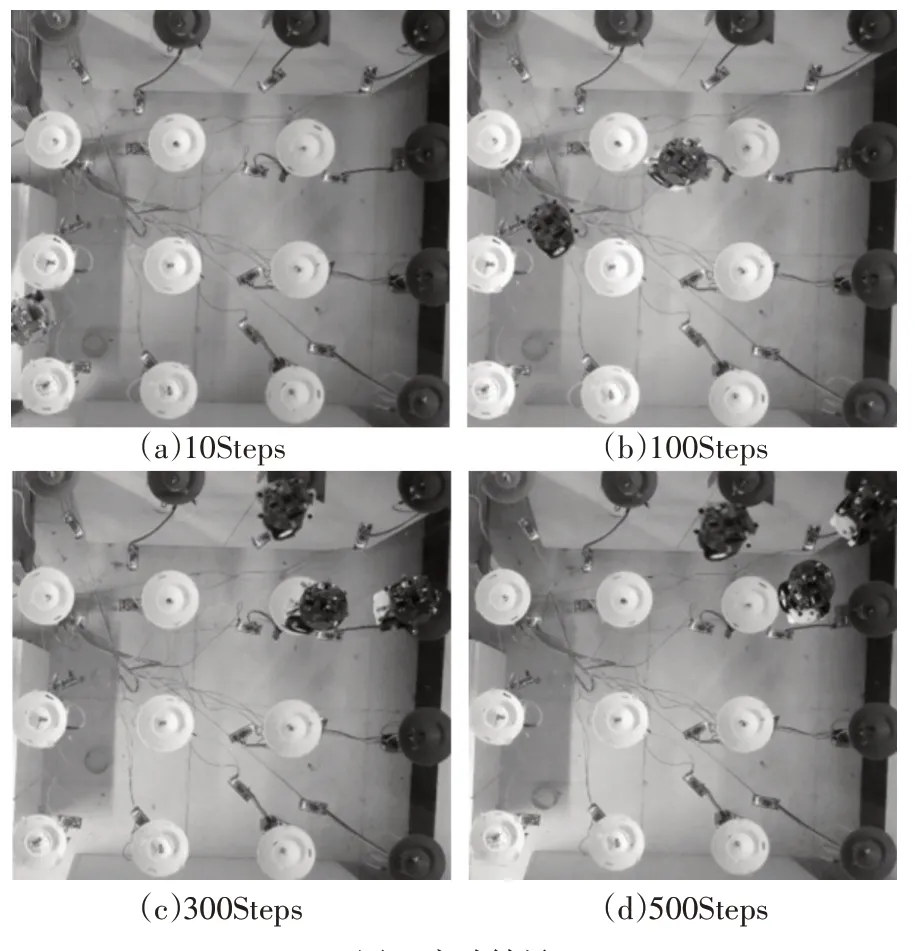
图6 实验结果Fig.6 Experimental Results
通过观察群体机器人最后的运行状况,以及表1所示的虚拟信息素系统,得出群体机器人系统构建的最短路径,如图7所示。经测量其长度为1382mm。而本实验中的最短路径即为从起点到终点的一条直线,其长度为1280mm,机器人从起点到目标的信息素浓度与图示的最短路径基本吻合,其长度差距在7.9%以内。经过530步运动之后,机器人所构建的最优路径与实际最短路径仍然存在差距,分析可知,这是由于实验中的机器人依赖信标中继器去获得路径,但是机器人在多个信标引导下依然存在犯错的概率,而且,由于最短路径是一条直线,而实验所得路径必然是由多段线组成,因此实验所得路径只会逼近最短路径。
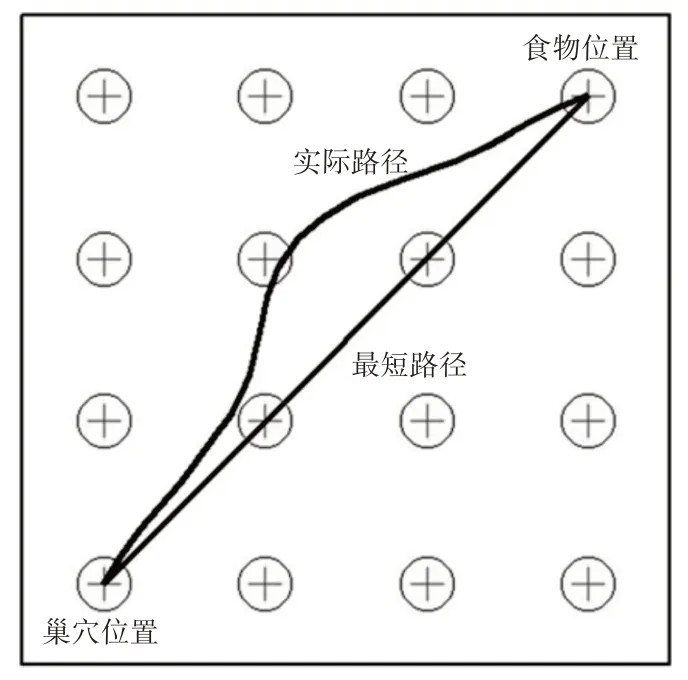
图7 群体机器人构建的最短路径Fig.7 The Shortest Path for Swarm Robot Construction
5 结语
基于蚁群觅食行为,提出了一种基于虚拟信息素的仿生蚁群目标搜索与路径规划方案,并将虚拟信息素应用于小型机器人之间通信交互。实验表明,虚拟信息素方案能够很好地模拟自然界中的蚁群信息素,为机器人提供通信渠道。然后,设计了一套独特的硬件系统,通过实验验证了这种仿生虚拟信息素的可行性。整个系统的的运行状况和最终结果证明了虚拟信息素在解决目标搜索与路径规划问题中的实用性与可行性。
猜你喜欢
广东通信技术(2022年3期)2022-04-25
科学导报(2019年38期)2019-09-03
少儿科学周刊·儿童版(2017年5期)2017-06-29
学苑创造·A版(2017年3期)2017-04-27
发明与创新(2016年17期)2016-12-22
发明与创新·大科技(2016年5期)2016-05-17
全球定位系统(2015年4期)2015-02-28
物联网技术(2014年7期)2014-09-24
学苑创造·A版(2014年6期)2014-08-04
科学时代·上半月(2013年2期)2013-04-15
