
水泥混凝土整平机自动升降液压系统仿真研究
2022-09-22 01:35马丽英徐建伟杨隧中曹源文董琴琴
机床与液压 2022年3期
马丽英,徐建伟,杨隧中,曹源文,董琴琴
(1.重庆交通大学机电与车辆学院,重庆 400074;2.河南郑州路桥建设投资集团有限公司,河南郑州 475000)
0 前言
水泥混凝土整平机用于水泥混凝土路面,以发射器发射的激光为基准平面,通过水泥混凝土整平机自动升降液压系统实时控制整平达到规定整平标准[1]。自动升降液压控制技术对于降低人工作业操作误差、提高平整作业精度和质量非常关键[2]。

但尚未发现针对其自动升降系统进行专门的系统模型建立和液压系统仿真试验。据此,本文作者对水泥混凝土整平机整平板和激光接收器系统进行模型建立及对液压控制系统进行仿真试验和仿真结果的分析,论证了整平机自动升降控制液压系统的可行性,对水泥混凝土路面平整度优化以及整平机运动动力特性研究提供必要的参考[8]。
1 整平板和激光接收器系统模型建立
1.1 激光接收器与整平板升降驱动参数的设置
通过ADAMS软件先对激光接收器和整平-振动整平板进行建模,然后根据水泥混凝土整平机作业顺序,设置激光接收器上下驱动,待激光接收器到达一定高度停止后,整平板开始实施升降功能[9]。升降驱动的设置分别如图1、图2所示。

图1 激光接收器升降驱动设置

图2 整平板驱动参数设置
1.2 整平板振动参数设置
由于路面整平通过整平板的周期性振动完成,所以还需对整平板进行振动仿真分析。整平板振动参数设置如图3所示。

图3 整平板振动参数设置
1.3 整平板和激光接收器系统模型的仿真试验
完成整平板与激光接收器升降驱动与整平板的振动参数设置完成后,设定仿真时间与步数,进行仿真[10]。
仿真过后进入后处理模式,查看仿真结果。激光接收器在竖直方向上的位移变化与整平板在竖直方向上的位移变化分别如图4和图5所示。

图4 激光接收器在竖直 图5 整平板在竖直方方向上的位移图 向上的位移图
图4显示:仿真设定其初始位置为离地500 mm的高度处,0~1 s内曲线表示当接收水平高度低于初始位置时,激光接收器实现下降,仿真速度约为20 mm/s;1~2 s内曲线表示以离地480 mm为初始位置时,激光接收器实现上升,仿真速度约为30 mm/s。两种状态仿真结果表明能够在1~2 s内达到预定高度。待激光接收器达到预定高度后,能够保持其高度不变,保证了水泥混凝土整平机整平作业过程中的水平精度。
由图5可以看出:以整平板最高位置处为基准,设置整平板初始位置在-70 mm,在接收到高度信号后,整平板在1 s内识别输入信息后开始下降,3 s后达到预定高度,仿真过程中设定下降高度为75 mm,第4 s时整平板达到预定高度,并在到达预定高度后保持当前状态开始作业。由此表明:仿真模型可实现激光接收器与整平板的自动升降功能。
2 自动升降液压系统仿真
根据整平板和激光接收器系统能够实现自动升降功能,针对自动升降液压控制系统进行了以下仿真。
2.1 激光调平系统工作原理
水泥混凝土整平机是通过刮板将高出的水泥混凝土带走并初步刮平,达到设计要求的标高。调平是由整平机上的激光测控系统实时控制,根据激光扫描自动调平。激光发射器发出的激光束围绕着激光轴线方向进行扫描,形成一个扫描平面。激光接收器接收到发射器所发射的激光束后,将信号传输至液压控制阀,自动调整高度与之对准,从而达到找平的目的[11-12]。激光发射接收模块如图6所示。

图6 激光发射接收模块
整平机机身升降分为4个过程:机身的上升分为支腿着地、机身自动调平、水平上升和位置保持4个过程;下降则分为检查支腿是否充分着地、自动调平、水平下降和位置保持4个过程[13]。整平机机身自动调平升降系统组成如图7所示。

图7 整平机机身自动调平升降系统组成
2.2 激光接收器自动升降控制仿真
激光接收系统定位升降控制主要依靠电磁阀实现。电磁阀通过接收电动机的指令,完成相应的升降功能。当电磁阀接收到正转指令时,电磁阀左位接入,进出口方式为P—B、A—T,电动机正转;当电磁阀接收到反转指令时,电磁阀右位接入,进出口方式为P—A、B—T,电动机反转[14]。
激光接收器自动升降液压系统原理如图8所示。此系统通过角位移传感器6采集激光信号,将采集的信号与重合水平位置进行比较,得出角度差;然后激光信号转换为液压信号后传至电磁换向阀3,控制电动机的转速与转向,从而控制激光接收器实现升降功能;达到发射器提供的高度后,电机1停止运行,完成激光接收器对应高度指令。
在仿真时,仿真时间设置为10 s,设置求解器误差值为10-7,最大时间步长为30 s。

图8 激光接收器自动升降液压系统
根据工作原理在AMESim软件中对液压控制系统进行仿真设置,启动仿真后得到液压控制阀进出口流量及压力值,该值表明在仿真过程中,系统运行的稳定性和准确性。得到激光接收器自动升降系统中液压控制阀仿真计算结果如表1所示。

表1 电液换向阀仿真计算结果
如表1所示:P口流量与A口流量相对应,均为-40.469 L/min,T口流量与B口流量相对应,均为40.469 L/min,流量保持稳定不变,系统运行稳定;在载荷变化时能保持阀内进出口的压差为定值150×105Pa。由此可以看出:在液压系统运行过程中,执行元件的运动速度非常稳定。
2.3 整平板-振动升降液压控制仿真
整平板自动升降液压系统原理如图9所示。此系统中液压泵为系统供能,它以恒定的压力向系统供油,溢流阀2决定液压泵的压力,液压动力装置由三位四通电磁阀3和液压缸5组成。位移传感器6实时检测路面位移,通过恒定信号源将信号传输至电磁阀3,将机械信号转换为液压信号输出;PID伺服控制系统对整个控制系统进行偏差调节,使被控液压推杆位移与实际输入位移指令一致[15]。液压缸5作为执行装置,通过通压力油和回油控制整平板的升降。
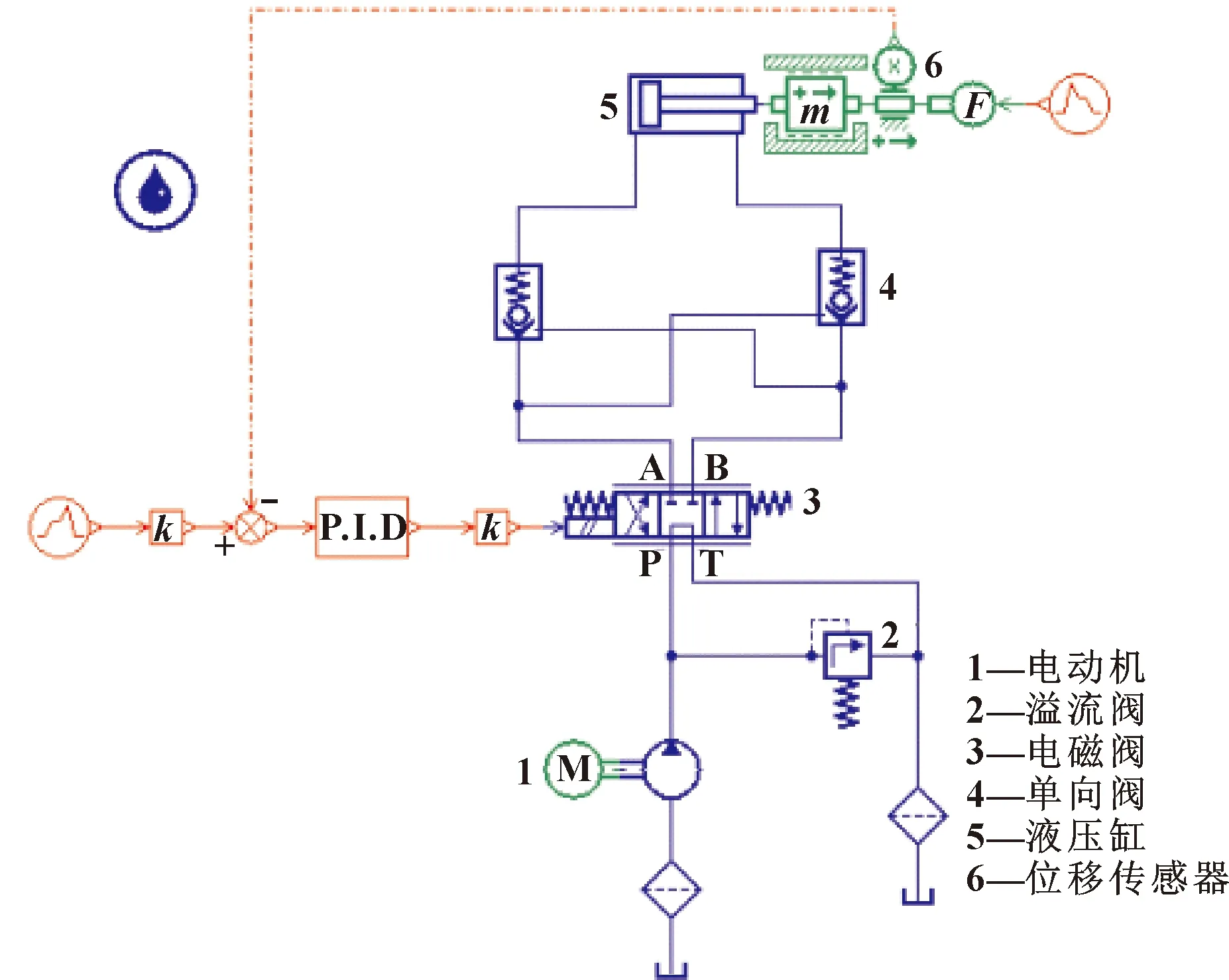
图9 整平板升降液压系统原理图
仿真时间设置及求解器设置同上,得到整平板自动升降液压系统中液压控制阀仿真计算结果如表2所示。

表2 液压控制阀仿真计算结果
如表2所示:液压控制阀右位接通,P口与A口压力差值和T口与B口压力差值接近,液压杆推动整平板下降,保证整平板降落过程中的稳定性。
3 液压控制系统仿真试验对比
3.1 激光接收器自动升降仿真试验对比
对于激光接收器的自动升降液压系统设计,设置角位移传感器所接收到的角度分别为1 000°、1 500°和2 000°。角位移传感器输入值如图10所示,电磁阀工作后得到马达输出角度如图11所示。

图10 角位移传感器输入数据 图11 马达输出角度
可知,角位移传感器在t=3 s输入数据,并将角度位置信息输入至电磁阀中,在AMESim工作环境中启动液压仿真后,电动机从第3 s开始进行角度的对准,大概在第6 s时转动1 000°,在第8 s时转动1 500°,大概在第10 s时转动2 000°,有效地实现了激光接收器与发射器的对准。
从仿真结果可以看出:当位移传感器接收到角度信号之后,通过该液压系统,电动机转动角度与输入值完全相等,即激光接收器能够自动与激光发射器对准并达到同一水平,电动机会根据输入角度转动相应角度,从而使得激光接收装置实现与激光平面的对应,完成其自动升降。
3.2 整平板自动升降仿真试验对比
对于整平板的自动升降液压系统设计,设置位移传感器输入位移分别为0.1、0.2、0.3 m,位移传感器输入位移如图12所示,液压缸输出位移如图13所示。
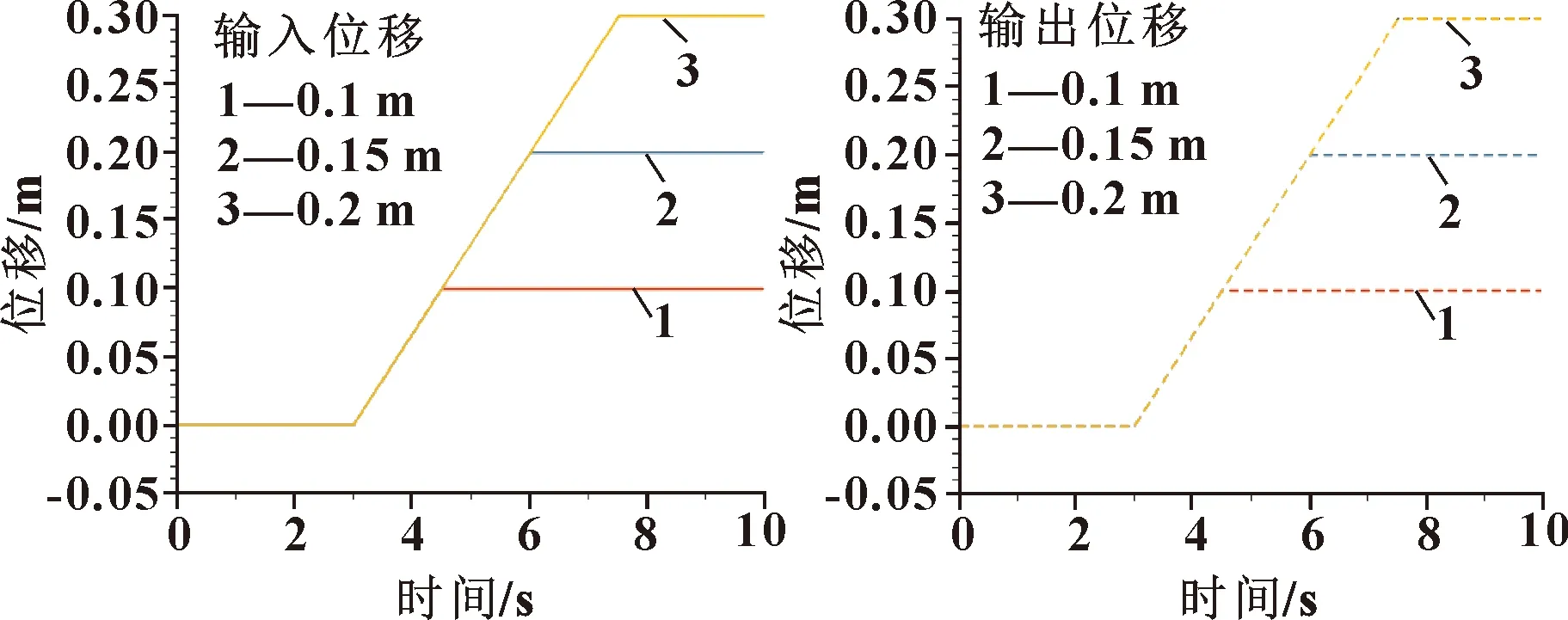
图12 位移传感器输入数据 图13 液压缸输出位移
对比位移传感器输入位移以及液压缸输出位移曲线可知:设定整平板分别需要移动0.1、0.2、0.3 m,如图12所示,位移传感器t=3 s输入数据,并将高度位置信息输入至电磁阀中。图13显示:液压缸推杆从第3 s开始进行运动来完成整平板的升降,在4~5 s内到达0.1 m处位置,在第6 s时到达0.2 m处位置,在第7~8 s时到达0.3 m处位置。通过两条曲线的一一对应可以看出:位移传感器输入位移值与液压缸输出位移值一致,说明液压缸能够准确到达位移传感器所输入的位移位置处,表明该液压系统能够使得整平板实现其自动升降功能。
4 结论
通过ADAMS软件建立激光整平机整平板和激光接收器系统模型,然后通过AMESim软件进行了整平板激光接收装置和整平板自动升降液压控制系统仿真试验,得出以下结论:
(1)通过ADAMS软件对激光整平机整平板和激光接收器系统模型的建立及验证,得出仿真模型可以很好地实现激光接收器与整平板的自动升降功能。
(2)利用角位移传感器输入、数据转换和电磁换向阀方向的控制,分别实现了激光接收装置的自动升降功能和电磁阀控制液压缸推杆的运动方向,实现了整平板的自动升降功能。
(3)根据输入输出数据进行仿真对比分析后得出:电动机根据输入角度自动转动相应角度,完成激光接收装置和激光发射器自动升降;同时整平板升降高度能够一一对应移传感器输入数据,最后通过液压升降系统准确完成自动升降功能。
(4)通过自动升降系统动力学模型的建立和液压控制系统的仿真分析,论证了该系统的可行性,为进一步提高平整作业的精度和质量、开展运动特性和动力特性研究提供了参考。
猜你喜欢
鞍钢技术(2022年3期)2022-06-12
中国金属通报(2021年17期)2021-12-23
科学与信息化(2020年20期)2020-10-12
珠江水运(2020年11期)2020-06-25
四川建材(2020年12期)2020-01-01
珠江水运(2019年12期)2019-07-16
珠江水运(2018年11期)2018-07-12
红蜻蜓·低年级(2017年6期)2017-10-30
支点(2016年11期)2016-12-22
专用汽车(2014年1期)2014-12-10
