电化学水处理水下机器人研究现状与展望
2022-09-23 11:49董伯勇黄寿强
江苏理工学院学报 2022年4期
董伯勇,丁 力,黄寿强
(1.江苏理工学院 机械工程学院,江苏 常州 213001;2.江苏理工学院 资源与环境工程学院,江苏 常州 213001)
随着经济的发展和工业化进程的推进,含氯废水正逐渐成为水处理领域重点关注的一类废水。含氯废水的主要来源为生活废水和工业废水,其中的氯离子作为一种广泛存在的非金属元素,化学性质较为活泼,容易与废水中的有机物结合生成氯仿、三氯甲烷等致癌物[1],对生物和环境造成巨大的伤害,需要对其进行有针对性的处理。传统的脱氯手法[2]主要有离子交换、蒸发、电渗析等,但这些方法都具有一定的缺陷,如:离子交换膜技术对膜的要求较高;蒸发结晶技术对温度的要求较高;电渗析技术需要大电压从而造成电力的浪费;等等。传统工业废水脱氯处理一般包含三个流程:(1)对原水预处理并调节PH值;(2)采用电渗析或高温结晶技术去除水中氯离子、氨氮等污染物;(3)对达标废水后处理并收集。20世纪90年代末,兴起了一项新的脱盐技术,即CDI(Capacitive Deionization)技术,该技术是利用电荷吸附的作用,通过外部施加电压实现废水的脱氯过程[3],并且可控制电流回路,实现电极的自主再生完成循环利用。相较于传统的水脱盐设备,CDI技术在吸附和脱附过程中,无需添加药剂,不会出现二次污染等问题。在处理过程中,CDI技术对水的回收率高,并且所消耗的能源比电渗析技术要低[4]。但传统设备存在不够智能、占地面积大、消耗资源多等缺点[5],且与CDI技术耦合低,故需要一种更加智能的设备以改善此类问题。
利用现代化技术对水处理作业进行升级改造,将信息化与智能化融入水处理作业中,对提升水处理效率和质量具有重要意义。作为机器人技术在水下环境的特殊应用,水下机器人是机械、信息、材料、计算机、智能控制等多学科前沿技术的结合体[6-7]。水下机器人最早应用于水处理作业中的水体检测环节,它将多个水质传感器集成在水下机器人上,在其自主移动的同时,传感器收集水质情况并反馈给用户,完成对水质的实时监测。相较于目前的水处理设备,结合机器人技术开发的电化学水处理水下机器人具有以下特点:(1)机动性强,可以灵活地移动作业;(2)占地面积小,节约空间;(3)可以很好地和电容去离子技术耦合,发挥两者各自的优势。这些特点使水下机器人在水处理工作中具有很好的应用前景,如Jacobi等人[8]在水下机器人上搭载了电导率、溶解氧等传感器,并设计了规划及导航系统,实现了大范围的水质监测。
相较于检测任务,水体治理则更具挑战性。电化学水处理水下机器人在水下非结构环境自主作业过程中,由于所处环境复杂,出现了一些技术难点:(1)在废水恶劣环境中工作,要考虑自身多变量耦合、非线性以及所在废水环境水动力的时变特性,建立系统动力学模型困难;(2)在水处理作业过程中,机器人对预定轨迹进行跟踪,并要求其位置、姿态、速度等满足水处理作业需求,而满足这些要求的控制器设计困难;(3)在水处理作业中,需要考虑水处理模块的最优工作参数,使得于单一水质检测水下机器人协调规划困难。上述问题的存在,使电化学水处理水下机器人开发难度提高。为了便于开展下一步工作,本文将对近年来国内外关于电化学水处理水下机器人涉及的关键技术进行综述,并对其中系统平台搭建、动力学建模、运动控制以及规划等相关技术进行分析和展望。
1 电化学水处理水下机器人系统平台
本文提出的电化学水处理水下机器人包括航行控制模块、通讯模块、动力模块、水处理模块及电源模块。如图1所示为废水处理的工作流程。当原水进入时,水下机器人接收信号开始循迹工作,同时给水处理模块供电。在处理过程中定时间隔采样,并对采样结果与出水标准进行比对,若废水电导率不再变化时,就进入二次判断阶段,即判断电导率不再变化的原因是水处理工作完成还是电极吸附容量达到峰值。若是因为水处理完成,则将废水排放进合格储液罐;若是因为电极吸附量达到最大,则对电极两端电压进行反接进入电极清洗阶段,以便继续工作。

图1 电化学水处理机器人工作流程
2 电化学水处理水下机器人系统模型
水下机器人在进行废水处理作业时,不仅受到水流影响,同时还受到自身重力、浮力和信号传输延时的影响。这些影响再加上水下机器人自身多变量、欠驱动的特点,以及水动力的不确定性,使得系统精确模型的建立更加困难。Mahesh等人[9]为了模拟水下机器人的运动,利用Lagrange方法建立了运动方程。徐钻等人[10]利用Kane方法建立了水下自重构机器人的动力学模型,并对其可控性和可靠性进行了分析、仿真。
2.1 电化学水处理水下机器人运动学分析
为了详细描述水下机器人的位置、姿态等信息,需要对其建立合适的坐标系。根据国家水池会议(ITTC)和造船与轮机学会(SNAME)标准[11-12],建立如下坐标系:惯性坐标系E-ςζη(简称“定系”);机体坐标系O-xyz(简称“动系”)。如图2所示,为电化学水处理水下机器人结构示意图。
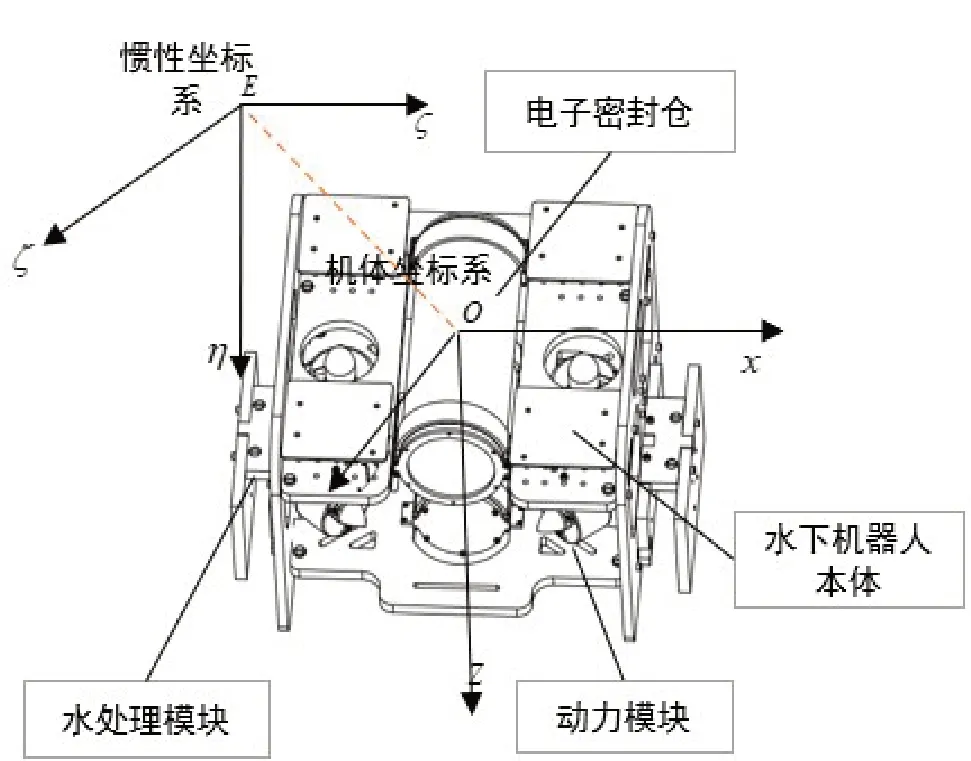
图2 水下机器人结构示意图
2.2 电化学水处理水下机器人动力学分析
对于水处理水下机器人建模而言,需要分析废水池中水环境的影响。为了便于分析,常把水下机器人作为单刚体进行处理。常用的单刚体动力学建模方法有Kane方法、Lagrange方法和Newton-Euler方法。Kane方法直接表示了动力学模型与外界环境力之间的关系,可以清晰地表达出外力对系统的动态响应;Lagrange方法基于能量守恒原理,规避了一些关于力、速度等矢量的复杂运算,但需要对方程进行繁杂的偏导计算;Newton-Euler方法将各个状态量进行清晰展示,简单直观,但是计算繁琐。在实际建模过程中,可通过历史数据和离线信息首先建立水处理环境的名义模型,此后,依据实际采集的数据或状态估计再对模型进行在线修正。
Capocci等人[13]根据Newton-Euler法建立水下机器人的动力学方程:

其中:M=MA+MRB,MA为质量矩阵,MRB为附加质量矩阵;C=CA+CRB,C为科里奥向心矩阵,来源于物体质量和附加质量的惯性力;D为阻尼矩阵;g是静力项;J为机体坐标转为惯性坐标的旋转矩阵。
水下机器人除了受到推力、重力和浮力的影响,还受到在水域中运动时周围水流作用在其上的力。水动力一般分为黏性水动力和惯性水动力[14-15],黏性水动力与水下机器人的速度有关,而惯性水动力与水下机器人的加速度有关。水动力参数具有时变性和非线性,很难获得精确的参数值,一般采用系统辨识的方法解决这一问题。具体而言,有经验法、试验法以及计算流体力学三种方法,如表1所示为三种方法的特点和适用对象。

表1 参数辨识方法
经验法[16-17]建立在大量数据的基础上,这些数据来源需要投入大量的资本,故这种方法经济效益不高;同时,经验法又多依据和舰艇、鱼雷相类似的流线型结构,不太适用于开架式水下机器人。
试验法[18-20]是在已有系统动力学模型基础上,通过施加外部激励轨迹,基于输入输出数据来确定速度和加速度相关参数,结果依赖于输入输出数据的精度。Enevoldsen等人[21]采用六种试验法以获得精确的动力学模型,根据较低转速下可以忽略由推进器不对称所引起误差的假设,利用相关数据搭建实际样机,验证了实验结果的准确性。Avila等人[22]采用平面运动机构(PMM)对水动力参数进行辨识,并用莫里森公式和最小二乘法对试验得出的数据进行拟合处理。
相较于试验法,计算流体力学(Computational fluid dynamics)方法是伴随计算机技术和软件开发技术而诞生的,其原理是借助数值计算方法对流体力学中的非线性项进行逼近,求解其中参数,依赖模型仿真数据。Kaya等人[23]采用CFD软件来分析水下自治航行器的操作参数,对关键参数如附加质量、惯性矩阵等进行估算,评估水下机器人的运动状态,从而获得最佳的运动参数。Binugroho等人[24]利用CFD软件对水下机器人进行设计,详细介绍了Fluent软件的分析步骤,并将软件分析所得数据应用于样机,以观察样机运行的实际效果。
3 电化学水处理水下机器人运动控制
水下机器人作为一个多输入多输出、非线性、各自由度变量之间存在耦合以及时变特性的欠驱动系统[25],由于受到浮力、附加质量、阻力和升力以及外加扰动(水流、水浪)等影响,导致关键参数获取复杂,系统控制模型建立困难;因此,需要采用对模型依赖小的控制算法设计控制器。中外学者先后进行探索,提出了一系列传统控制算法,如PID、滑模、自适应方法等[26-27],并结合动力学补偿或观测器的控制策略解决问题;同时,伴随人工智能技术的发展,还有一些学者尝试将该技术应用于自动控制领域,构建基于数据的控制策略,以解决水下机器人非线性系统控制问题。
Rua等人[28]针对ROV设计了控制器,并探讨重力补偿对PID算法稳定性的影响,得出结论:相比于无重力补偿项的PID算法,有重力补偿项的ROV在运动稳定性的表现上更佳,证明了控制算法的合理性。Dong等人[29]在针对核电站检测ROV设计中,采用模糊PID与动力学补偿控制方法设计控制器,并采用CFD软件辨识参数,对深度进行精确控制。Chu等人[30]针对水下机器人深度进行跟踪控制,利用神经网络辨识参数,设计了滑模控制器,通过数据仿真验证了控制算法的有效性。Wang等人[31]采用自适应滑模控制器加线性状态观测器对水下机器人进行轨迹跟踪控制,将仿真数据与实际样机结合,验证了其稳定性和可控性。
相较于上述方法,融合人工智能技术的控制算法能够将控制问题转化为优化问题[32-33],根据输入输出历史数据让机器自我训练,完成参数的整定,从而降低了控制器设计过程中的建模、调参难度。Carlucho等人[34]基于深度强化学习方法,实现AUV底层控制,由AUV搭载DVL(多普勒计程仪)和IMU(惯性测量单元)传感器采集数据作为输入状态变量,通过深度强化学习训练输出。Guo等人[35]采用神经网络方法进行参数识别,并结合滑模控制对没有速度测量模块的水下机器人进行控制器设计,最后得出结论:在同种水动力学参数未知的情况下,基于神经网络参数识别控制器的鲁棒性要优于PID与改进的滑模变结构控制器。上述方案验证了人工智能技术在水下机器人运动控制方面的可行性[36],为水下机器人的控制策略研究提供了新的思路。
4 电化学水处理水下机器人航迹规划
为了实现水下机器人的自主作业功能,需要赋予水下机器人自主规划能力,实现该功能的首要前提是获取准确的工作路径,这依赖于航迹规划技术和导航技术。航迹规划技术主要解决水下机器人在特定目标点之间最优路径生成的问题,从而使水下机器人在工作环境下实现路径最短及功耗最少的功能。航迹规划算法[37-39]包括几何模型搜索算法、人工势场法以及人工智能法。
几何模型搜索算法建立在高精度地图的基础上,地图的精度决定了算法搜索的效率和质量。环境建模方法有可视图法、Voronoi图法[40]。几何模型搜索算法有Dijkstra’s算法[41]、A*算法[42]等。Dijkstra’s是指采用贪婪策略,利用BFS(宽度优先搜索)来解决有向图或者无向图的单源最短路径问题。A*算法原理是在Dijkstra’s算法的基础上加入估值函数,将函数作为启发算式来解决水下机器人的航迹规划问题。Pi等人[43]在基于任务优先级的规划思想下设计了基于A*搜索算法的运动规划算法,将其运用到ROVs上,并探讨了高纬度自由度的ROVs系统对机器人运动的干扰和影响。A*算法是Dijkstra’s算法的改进版本,用来解决Dijkstra’s算法遍历节点多、效率低的问题。
人工势场法是在虚拟立场环境下,通过函数模拟引力场和斥力场来达到模拟障碍物的目的。Khalaji等人[44]设计了一款基于李雅普诺夫函数的非线性控制器,采用人工势场法来解决水下机器人避障问题。采用人工势场法规划的航迹一般较为平滑,其算法原理简单,但是容易陷入局部最优,使系统震荡。
人工智能算法是指模仿动物的行为对实际工作系统进行优化,目前主流的算法有灰狼算法、神经网络算法、粒子群算法以及遗传算法等。Zhang等人[45]提出将遗传算法用于多AUV的路径规划,生成了低功耗、无碰撞的最优规划路径,验证了方法的可行性和有效性。人工智能算法相较于几何模型搜索算法和人工势场法,具有不依赖环境模型、搜索能力强、可以得到全局最优解的特点。
5 总结和展望
综上,针对电化学水处理水下机器人系统建模、运动控制和航迹规划等技术,阐述了近些年相关学者在该技术领域的贡献。在现有的水处理作业中,存在劳动量大、危险性高、占用大量土地资源等问题,需要进行产业结构改良,而水下智能化环保设备的开发结合了电化学水处理技术与机器人技术,具有很好的应用前景。
但是,后期要实现电化学水处理水下机器人从实验室研究到投入实际工程应用,还需解决以下三方面问题:(1)水下机器人与周围环境交互能力弱。在水下复杂环境,现有的监测手法较为单一,且可靠性差。未来要研究基于物联网以及多个无人设备的联合感知,利用空间三维网络联合监测,采用卫星、遥感等多手段测量,增加监测的手法,增强监测结果的可信度,为水处理作业提升效率。(2)控制模型与控制方法不够精确。在水下复杂环境,当检测到污染源时,需要水下机器人快速到达目标点,进行精确的水处理作业,故需要提高水下机器人的响应速度。未来将发展高可靠性、稳定性以及抗干扰能力强的运动控制系统,以便适应水处理作业的要求。(3)成本相对较高。水下机器人进行水处理作业时是将电能转化成化学能,虽然相较传统水处理设备降低了能耗,但是依然会增加经济成本。未来将进一步研究如太阳能一类的清洁能源,以及利用人工智能的方法对电力进行合理配置,从而降低成本,增加经济效益。
猜你喜欢
中学生数理化(高中版.高考理化)(2021年4期)2021-07-19
中学生数理化(高中版.高考理化)(2020年10期)2020-10-27
表面工程与再制造(2019年6期)2019-08-24
资源节约与环保(2018年1期)2018-02-08
故事大王(2016年7期)2016-09-22
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
儿童故事画报(2013年3期)2013-06-24
小哥白尼·军事科学画报(2009年9期)2009-09-14