基于小波分解与融合的视频去雨技术研究
2022-09-28 14:50陈强
电子设计工程 2022年18期
陈强
(安康学院科研处,陕西安康 725000)
近年来,计算机视觉在智慧交通、遥感探测、医学仪器等领域都得到了广泛应用。其中机器视觉技术用于交通监管,例如在路口对车辆速度和驾驶行为进行监控,对违规车辆实现自动识别,节省了人力资源。但在雨雪天气下,采集到的图像不够清晰、对比度下降、细节丢失,在处理过程中容易出现误判或者延时过大的情况[1-3]。去雨技术可以清晰化被雨噪声污染的退化图像,有利于图像后续处理,提高相关技术的性能指标[4-6]。
雨滴在空间中的分布是随机的,且处于高速自由下落的运动状态,在图像中的检测和去除比较困难,图像去雨技术也成为当前的研究热点。Liu比较相邻各帧的RGB 颜色分量,得到差值图像,检测结果的准确率较高,但需要增加数据量,牺牲了实时性[7]。Santhaseelan 设计的视频去雨算法使用局部相位信息完成,去雨效果好,但同样实时性不强[8]。
视频去雨算法要想提高某一特性就要以牺牲其他性能为代价,存在计算量大、造成延时等问题[9]。该文根据雨线在频率域呈现高频的亮度特性,采用小波分解和融合的方法,从频域角度对视频各帧进行小波多层分解并计算出污染度,再根据污染度加权的重构规则对各帧进行小波重构,最后将各帧进行融合从而削弱图像中的大部分雨噪声。
1 雨滴特性
雨是日常生活中常遇到的天气现象,在雨天拍摄图片、视频时,由于雨滴在空间中的分布是随机的,且雨滴处于高速自由下落的运动状态,雨滴在视频成像时,会形成雨线,影响视频的质量。雨滴为半径0.05~1.75 mm 的近似球体,当雨滴较大时,近似为椭球体。在无风的情况下,雨滴降落受多个力学因素的共同影响,最终达到稳定速度,该速度与雨滴直径有关。雨滴的降落方向受风向影响,在同一图像中方向基本一致[10]。由于雨滴对光线的折射和反射,所以在图像中,雨滴对应的像素亮度明显高于背景像素。
另外,由于雨滴的下降速度影响,图像上会产生模糊的雨线,降低了图像的质量。雨滴的对应像素亮度同时受到雨滴和背景亮度的双重影响。其亮度变化具有时间上的对称性,并且雨滴像素的亮度值随时间的波动很小[11]。
RGB 3 个原色通道的视角范围远小于雨滴视角范围,所以通道值变化量可近似看成相等[12]。雨滴分布随机,近地面速度较快,同一雨滴不可能出现在相邻帧,任一像素也不会始终被雨滴遮挡。
2 图像的小波分解与融合
图像融合是将两幅或多幅图像的信息融合到一起,以获得对同一画面更为准确全面的图像描述。小波分解有明显的方向性和塔状结构,对不同频率的分量、方向、分解层,要用不同规则进行处理,利用冗余和互补信息来提高效果[13]。
对一幅图像进行N层小波分解,然后进行融合,步骤如下:
1)对原始图像(如图1(a))进行小波分解,分解为4 个图(图1(b)、(c)、(d)、(e)),分别对应低频近似系数、水平细节分量、垂直细节分量、对角细节分量。可根据实际需要,对低频近似系数分量重复上述过程,建立小波塔形分解,分解的层数越高,数据的尺寸越小,包含的细节信息越少。
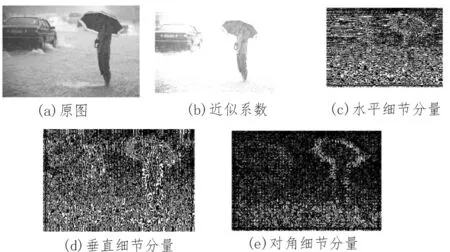
图1 有雨图像的小波分解
2)融合各分解层,使各层的低频近似系数、高频水平细节分量、高频垂直细节分量、高频对角细节分量等可以根据不同的要求,采用不同规则进行融合。
3)对金字塔进行图像重构,得到融合结果。图像融合过程如图2 所示。
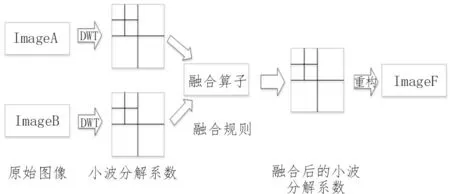
图2 图像融合过程
3 去雨算法
雨噪声的频率与景物信息有较为明显的区别,纹理细节频率最高,雨噪声的频率次之,颜色信息频率最低。经小波分解,雨噪声主要在低层高频系数中,因此应尽量提高分解层数;然后再确定细节信息、雨噪声等所在层[14]。
对退化图像进行小波融合,根据频率结构分别对背景与颜色、雨噪声、纹理边缘的细节三部分信息进行融合,并根据小波分解后的特点制定融合规则[15]。
融合雨噪声就是融合高频系数,融合规则的合理性是决定退化图像中雨噪声去除效果的关键。在视频中观察雨滴,其因移动而表现为明亮细线。雨滴呈透明液态,雨滴亮度均在200 尼特附近,比较一致[15]。
对含有雨噪声的图像进行小波处理时,鉴于雨的亮度比背景高得多,因此雨覆盖的部分与背景部分的灰度相差较大,可以用局部梯度来表示灰度变化的大小,局部梯度如式(1)所示:

其中,Δxf(i,j)和Δyf(i,j)分别表示点(i,j)在水平和垂直方向上的梯度;M、N表示局部区域边长。
雨的亮度一致,雨覆盖部分与背景能量值高且稳定,局部能量如式(2)所示:

其中,f(i,j)表示像素灰度值。
局部梯度G和局部能量E两个参数能表征出雨噪声具有高且一致的亮度。
雨噪声污染度S=G×E,表示图像被雨噪声污染的程度。
基于污染度的小波融合步骤如下:
1)小波分解:进行10 层小波分解,得到第2-4 层的高频系数(含大部分雨噪声)。
2)融合含噪高频系数:求解2-4 层高频系数矩阵及污染度S矩阵,对S矩阵归一化处理,然后和系数矩阵逆加权,得到大幅减噪的新系数矩阵。
3)融合不含噪系数:融合5-10 层系数及第1 层高频系数,其中包含了图像主要细节信息,进行均值处理后,可突出图像的颜色域和细节。
4)小波重构:重构融合后的系数,得到去雨图像。融合流程如图3 所示。
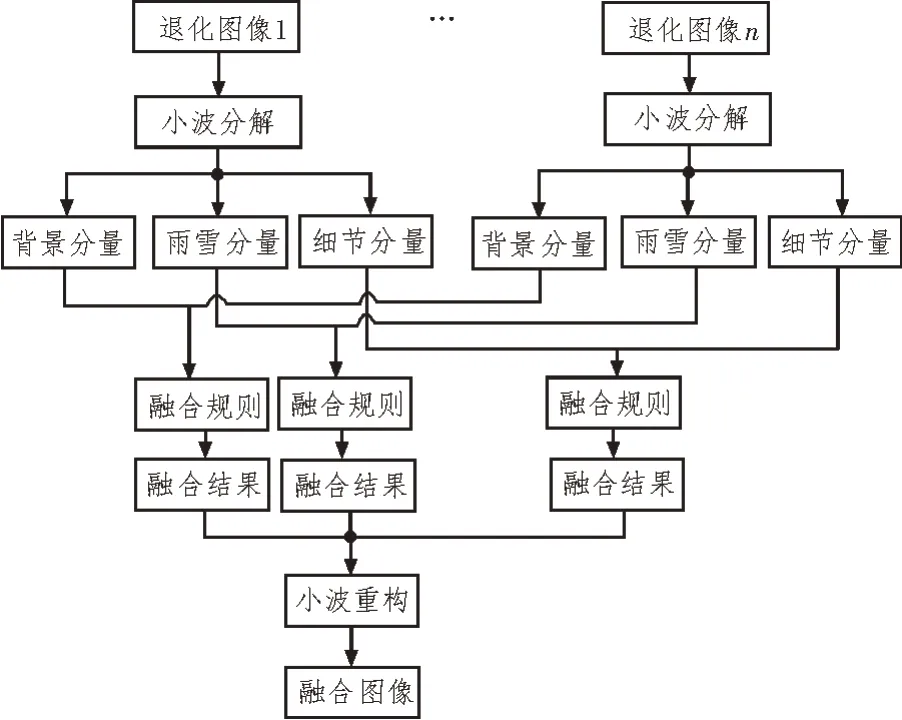
图3 融合流程
4 实验与验证
为了验证该文方法,使用Matlab 进行仿真试验,步骤如下:
第一步,将一段有雨视频分解成帧图像,在利用多幅退化帧图像进行融合的过程中,细节受损的多幅退化图像间可以相互弥补,突出细节信息。
第二步,对每个帧画面进行多层小波分解,随分解层数的提高,其中的细节信息降低,呈现塔状结构。图4 为多层小波分解的低频系数和分量,从上到下随分解层数的提高,图像中的像素块增大,整幅图像包含的细节信息减少,这一过程中雨噪声在层数较低时含量较多,尤其雨噪声在小波分解的第2-4层的含量最大,其他层多为背景信息,可以利用这个特性,制定融合规则,针对第2-4 层进行去除雨噪声处理,将其他层进行融合,突出背景信息。
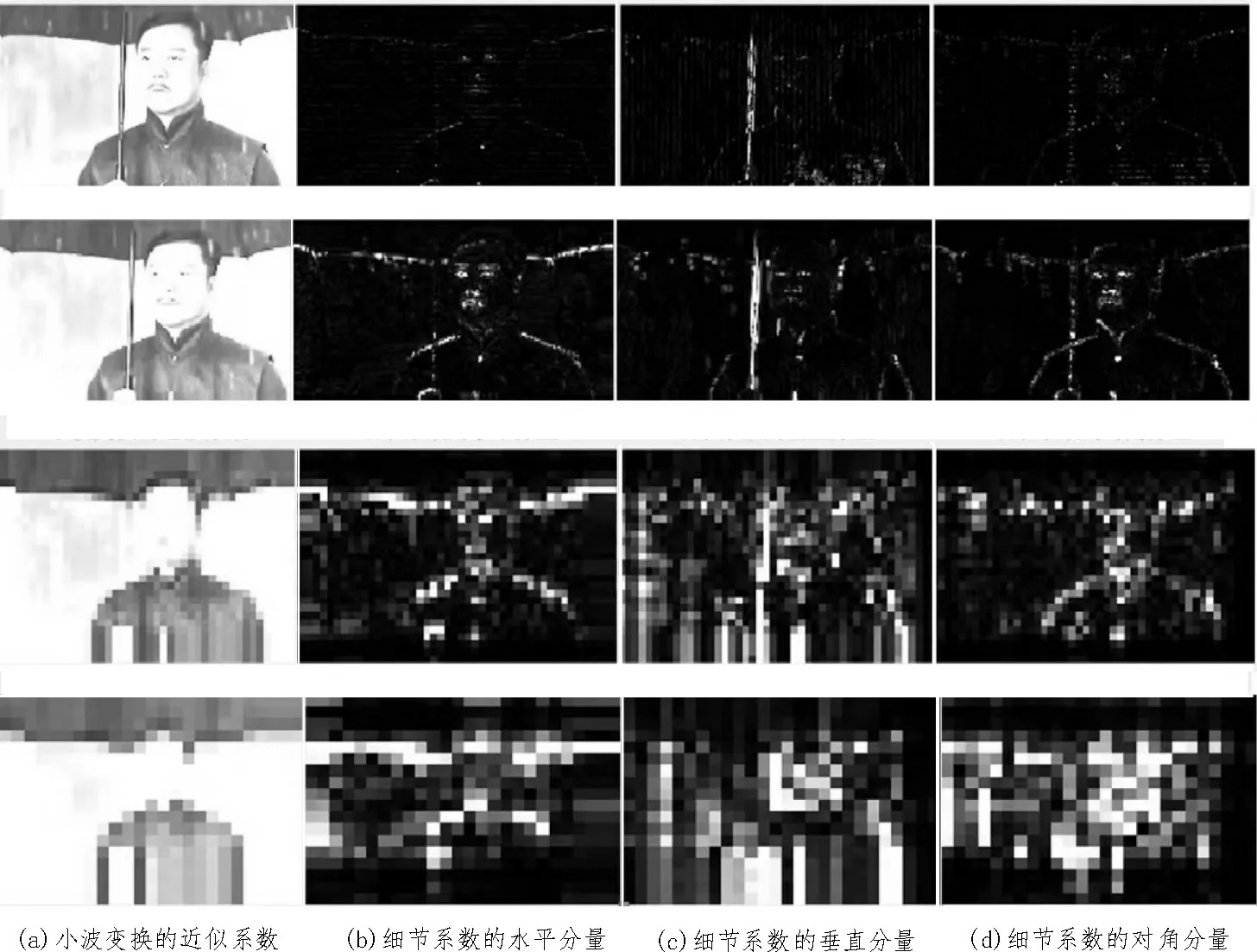
图4 多层小波分解的低频系数和分量
第三步,通过各帧根据污染度反向加权削减雨噪声后进行小波融合。
第一步将视频分解得到6 帧图像,第二步将每一帧进行10 层小波分解,雨噪声明显比周围像素亮度大,对其中第2-4 层以局部梯度来度量灰度变化,以确定雨噪声的量,从而确定每一层的污染度。在进行融合时,根据污染度的大小反向加权,即污染度越大,权重越小,从而削弱第2-4 层的雨噪声。由于物体边缘或背景中的一些亮白像素容易误判为雨噪声,第2-4 层同样会被削弱,所以该文对第1、5-10 层(主要含背景信息)加的权值大于1,进行补充。最后将融合好的6 帧图像再次进行图像融合,最终得到图5(a)的融合结果。通过对比,融合后的图像背景和轮廓更加清晰,雨线明显减少,雨噪声得到了极大抑制。
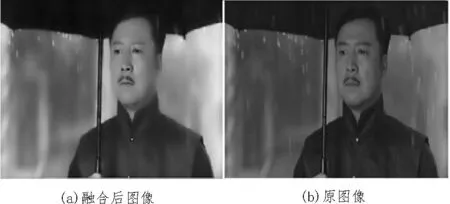
图5 融合结果和原图像的对比
5 结论
该文采用小波多层分解[16]和融合的方法,将图像多层分解,确定含雨噪声比较集中的层,并制定了基于污染度的反向加权融合规则(即污染度越大,权值越小),借此来削弱雨噪声,并对视频中图像的特定层进行小波融合以去除雨线。实验证明,该方法去雨效果明显,具有一定的应用价值。
猜你喜欢
航天返回与遥感(2022年4期)2022-09-03
家庭影院技术(2021年6期)2021-07-28
草原歌声(2020年3期)2020-12-08
读者·校园版(2020年19期)2020-09-16
学生天地(2020年24期)2020-06-09
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
摄影之友(影像视觉)(2019年3期)2019-03-30
小学生导刊(2018年19期)2018-08-21
英美文学研究论丛(2018年1期)2018-08-16