
PT 对称极化子凝聚体系统中的稳定孤子及其调控*
2022-09-30 05:41陈礼元高超林机李慧军
物理学报 2022年18期
陈礼元 高超 林机 李慧军
(浙江师范大学物理系,金华 321004)
通过构造外势与泵浦的空间分布,设计了一维非相干泵浦激子极化凝聚体系统满足的 PT 对称模型.在弱非线性效应情况下,确定了体系的 PT 对称相变点,展现了线性谱的特征.在正常非线性效应情况下,找到了零背景的亮孤子、零背景的多极暗孤子、非零背景的多极对称暗孤子、对称破缺暗孤子、非零背景的凹陷、凸起暗孤子,并讨论了外势虚部与非均匀泵浦对孤子轮廓与孤子稳定性的影响.通过分析孤子的轮廓与稳定性,厘清了 PT 对称外势与非均匀泵浦之间的竞争关系,给出激发各种亮、暗孤子的方案,并界定了这些孤子的存在与稳定区域.最后,通过调制 PT 对称外势虚部实现了对 PT 对称破缺暗孤子的调控,揭示了极化子凝聚体系统在全光开关等光信息处理方面的潜在应用.
1 引言
耗散、增益的存在不可避免地导致物理系统的非厄米性,激发了学者们的广泛兴趣[1].1998 年Bender 和Boettcher[2]发现宇称-时间(PT)对称的非厄米系统存在实本征谱,从而将传统量子理论推广到了复域.该结论要求势函数满足V(x)=V †(-x)(实部偶对称,虚部奇对称),且其虚部系数必须在某一临界值以下,即PT对称相变点或PT对称破缺点以下.PT对称系统的独特性质包括非正交的本征模与对称破缺点的出现等.2008 年,Musslimani 等[3]将PT对称概念引入光学系统,PT对称势通过复折射率n(x)=nR(x)+inI(x) 实现.近年来,在光学[4-11]、LRC 电路[12,13]、超材料[14,15]和冷原子[16-21]等系统中已经实现了周期、非周期PT对称势,并发现了许多奇特现象.在线性系统中,处于PT对称相(破缺点之下)的光束具有功率振荡[5,22]、相干完美吸收[15]等特性;在破缺点附近出现双折射现象[5,22];而在破缺相可实现单向波传播[4]、损耗诱导透明[6]、激光的单模操控[8,21]等.而在非线性系统中,强非线性效应可导致光在破缺相单向传输[10],饱和增益非线性效应使得光在对称相和破缺相均可单向传输[11],这些非线性效应均可激发多种稳定的孤子.寻求一个PT对称破缺点可控制、各种非线性效应易实现的系统成为研究PT对称系统特性的热点问题.
近年,由于二维量子阱激子与微腔光子形成的极化子凝聚体系统具有寿命短、有效质量轻[23,24]、相互作用强、凝聚温度高、增益与耗散共存[25]、以及操控性强等特性受到大家关注,不仅成为超冷原子气体—玻色-爱因斯坦凝聚体 (BEC) 的合适替代品,而且也成为设计下一代实用量子器件与光信息处理器件的理想平台[26,27].由非相干泵浦驱动的极化子BEC 系统相干机理清晰,可通过注入大失谐泵浦场、采用大角度光驱动、电场注入极化子等手段实现,使其成为实验与理论研究热点.该系统集动能、外势、增益、耗散、Kerr 非线性、饱和非线性、非局域等7 种效应于一体,存在多种非线性效应相互竞争,泵浦与外势相互影响,非线性增益与常数耗散共存.极化子BEC 系统的复杂性虽给研究其非线性特性带来了困难,但也为发现各种新颖性质提供了可能.
目前,在均匀泵浦系统得到的暗孤子、旋量涡旋和螺旋波[28-30]等非线性模均不稳定.引入外势可以激发丰富非线性模,如谐振势激发涡旋[31]、周期势阱存在带隙暗孤子[32]、复周期外势和高斯缺陷势诱导出暗孤子[33,34]以及有限深势阱中发现暗孤子和反暗孤子[35].外势可起到束缚作用,激发丰富的非线性模,但在平衡增益耗散方面不作贡献.为平衡增益与耗散,引入非均匀泵浦,给出了宇称孤子[36]、暗孤子[37]、亮孤子[38]、槽型局域态[39]和多涡旋结构[40]等.同时引入外势与非均匀泵浦,发现了亮孤子和涡旋[41]、带隙孤子[42]、空间斑图[43]以及旋量暗孤子链[44].非均匀泵浦本质也是提供外势,可获得丰富非线性模,但无法有效平衡增益耗散,故达不到稳定非线性模的目的.
在不同体系中设计PT对称模型始终是学者感兴趣的课题.对处于均匀稳态的耦合极化子BEC系统中的PT相变已有研究,2015 年Lien 等[45]讨论了处于PT对称相的多稳态;2016 年Chestnov等[46]讨论了体系永久的拉比振荡.利用极化子BEC体系固有的增益耗散,通过构造外势与泵浦场空间分布设计PT对称外势引起学者关注.2019 年马学凯等[47]在强外势且弱非线性近似下通过引入空间调制的外势与泵浦设计了近似的PT对称晶格,并研究了可控的高速极化波.2020 年贾春玉和梁兆新[48]引入满足PT对称的非相干泵浦场,讨论了体系的暗孤子.此时库密度具有与泵浦场相同的PT对称性,但由于库密度既出现在外势的实部,也出现在外势的虚部中,所以导致模型整体不具有PT对称性.以上两个方案的缺陷,致使探讨极化子BEC 非线性特性的PT对称模型一直未见报道.
本文首先引入由常数与高斯函数构成的复合泵浦[49],有效平衡体系固有的增益耗散[49],然后引入满足PT对称的外势,设计出满足PT对称的极化子BEC 模型.在弱非线性效应情况下,求得体系的PT对称相变点,进而展示线性谱的特征.在正常非线性效应情况下,利用预条件牛顿共轭梯度法[50]找到了体系在不同非均匀泵浦情况下的零背景亮孤子与多种类型暗孤子,讨论了PT对称外势对孤子稳定性的影响,并发现复合泵浦有效平衡增益损耗是孤子稳定的必要条件.通过分析孤子的轮廓与稳定性,厘清PT对称外势与非均匀泵浦之间的竞争关系,给出激发六种暗孤子和一种亮孤子的参数区域,并通过演化与线性稳定性分析界定了这些孤子的稳定区间.最后,通过实时调控PT对称外势虚部,达到了操控对称破缺孤子的目的,进而揭示了该体系在全光开关等方面的潜在应用价值.
本文安排如下: 第2 部分给出研究的模型及其在弱非线性效应情况下的线性谱;第3 部分找到了体系在不同非均匀泵浦时的亮、暗孤子解,并讨论了它们的稳定性;第4 部分通过研究非均匀泵浦以及PT对称外势对孤子轮廓及其稳定性的影响,确定了多种孤子的相图及其稳定区间,并给出操控孤子的方案;最后一部分给出结论.
2 PT 对称极化子BEC 的模型及其在弱非线性效应情况下的性质
2.1 理论模型
在平均场理论框架下,非相干泵浦极化子BEC序参量满足驱动-耗散的广义Gross-Pitaevskii (GP)方程.考虑系统的非平衡特性,引入速率方程刻画非凝聚的热库[26].此时,可用耦合方程
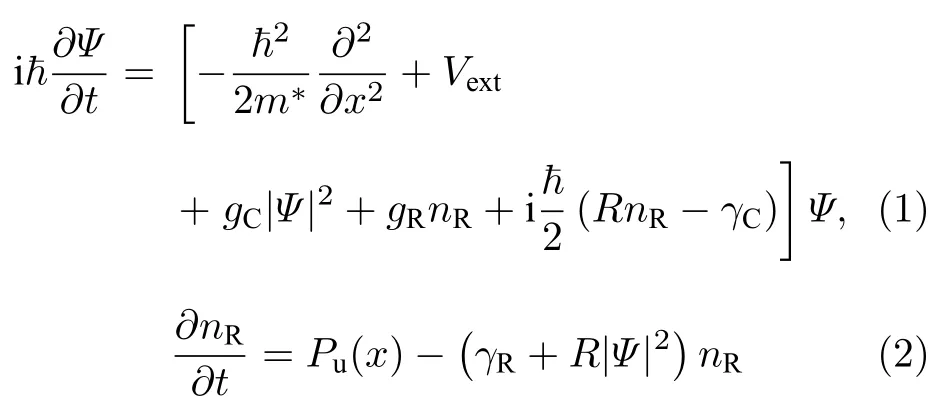
来描述一维纳米线系统中凝聚体运动[51].其中Ψ和nR分别表示极化子BEC 波函数和库密度;m*表示极化子BEC 的有效质量;Vext表示凝聚体感受到的外势;gC和gR分别表示凝聚体自相互作用和库与凝聚体间相互作用;γR和γC分别表示凝聚体和库密度的损耗率;R表示从热库到凝聚的受激散射率;Pu(x)=P0+表示复合的非相干泵浦,它由连续场P0和高斯波组成[49].PT对称外势有两大类[3],一大类为全空间调制的周期外势;另一大类是局部空间调制的非周期势,如Scarff II 型势.线性系统中,高斯型外势的本征函数模式丰富,致使在非线性系统中激发丰富的非线性模成为可能[52],与Scarff II 型外势比较,高斯型外势在实验上更易于实现、方便调控,故本文选择如下的高斯型PT对称外势[3,4,21,53,54]:

它满足Vext(x)=,其中的Vr和Vi分别表示外势实部、虚部的强度,†表示复共轭.
对方程(1)和(2)无量纲化可得

绝热近似下,由方程(5)可得n=,代入方程(4),外势部分由
贡献,式中泵浦场P(ξ)不仅出现在实部-V-σ1|u|2-(σ2P(ξ))/(1+σ6|u|2)中,同时也出现在虚部 i[(σ3P(ξ))/(1+σ6|u|2)-σ4] 中,不利于通过设计泵浦场构造PT对称势.文献[47]中提出,用奇对称周期函数与常数构成的泵浦场和偶对称的周期外势V设计PT对称势,为满足对称性,做了弱非线性效应|u|2≈0 与V≫σ2P(ξ)≈0 的近似,此时,偶对称的周期外势V贡献实部,奇对称的周期泵浦贡献虚部,从而获得周期调制的PT对称极化子BEC 模型.很显然,该模型在考虑非线性效应时不再满足PT对称性.而文献[48]中,直接选取常数与PT对称的Scarff II 型函数构成泵浦场,由上述分析可知,此时模型无法满足PT对称性.故设计具有PT对称外势的极化子BEC 非线性模型具有难度.为了寻求突破,本文首先借助复合的非相干泵浦平衡增益损耗[49],其中常数σ7主要用于平衡常数耗散σ4,非均匀部分σ8exp (-ξ2/w2)用来平衡由非线性激发引起的增益或耗散,平衡效果可用增益耗散强度I=来刻画;进而引入PT对称的外势 (3)构造出满足PT对称的模型(4).
为寻找方程(4)和(5)中的非线性稳态,设u(ξ,s)=ψ(ξ)eiβs,库密度n(ξ,s)=n′(ξ),可得
其中,β为化学势,n′=.根据文献[29]选取参数σ1=-1,σ2=0.3,σ3=0.5,σ4=0.1,σ6=4,σ9=1.
2.2 弱非线性激发的线性谱
首先考虑弱非线性激发的情况.当Ψ为弱场时,方程(6)可退化为线性方程:

选取连续泵浦P(ξ)=σ7=σ4/σ3,此时方程(7)完全满足PT对称性.
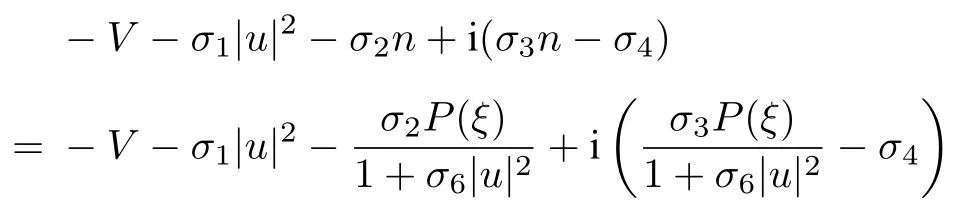
取ξ0=1,w=0.45.图1(a)给出外势V的轮廓图,可清楚地看到它的实部 Re(V) 关于ξ偶对称,虚部 Im(V)关于ξ奇对称[3],ξ>0 部分为增益区,ξ<0部分为耗散区.利用傅里叶配置法[50]可以得到方程(7) 的线性谱.图1(b)给出了化学势β的虚部随W的变化曲线.从图1(b)可知,当外势虚部较小时,化学势为纯实数,随着虚部的增加,当W>0.78 时化学势的虚部出现,可知W=0.78 是该系统的PT对称相变点或PT对称破缺点.图1(c)给出W=0.1 时的线性谱,可以发现该谱中包含连续谱和一个离散的本征值,是纯实谱,插图给出了离散本征值对应的本征函数,发现它的实部关于ξ偶对称,虚部关于ξ奇对称.图1(d)给出了W=0.9时的线性谱.此时,连续谱仍然存在,但出现了一对互为复共轭的离散本征值,发生了PT对称破缺[53-56].
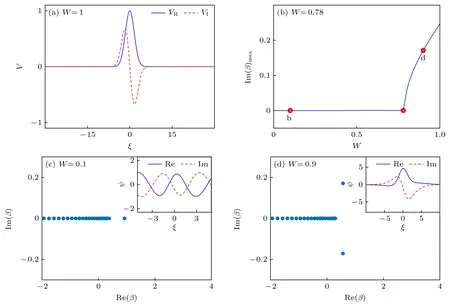
图1 弱非线性激发的线性谱 (a) 参数取 w=0.45,ξ0=1,W=1 时 PT 对称外势的轮廓图;(b) 线性谱中的虚部最大值随W 的变化曲线;(c) W=0.1 和(d) W=0.9 时的线性谱以及离散本征值对应本征函数的虚实部Fig.1.Linear spectrum of weakly nonlinear excitations: (a) Profile of PT symmetrical potential.Here,w=0.45,ξ0=1,and W=1;(b) Im (β)max as a function of W; (c),(d) linear spectrum for W=0.1,W=0.9 and the discrete eigenvalues corresponding to the imaginary and real parts of the eigenfunction,respectively.
3 不同非均匀泵浦时的孤子解及其稳定性
本节考虑正常非线性激发时可能存在的孤子解及其稳定性.利用预条件牛顿共轭梯度法[50],可获得方程(4)的孤子解及其功率P=,当孤子在非零的均匀背景上激发时采用归一化功率P=,其中表示均匀背景的值.一旦得到孤子解ψ,便可以引入扰动以及,得到扰动本征模式v1,v2和v3满足的本征值问题[49],求得扰动模式的本征值λ.当λ的实部大于零时孤子不稳定.此外,也通过分步傅里叶演化的方法验证所得孤子的稳定性.下面考虑不同非均匀泵浦时的孤子解及其稳定性.
3.1 非均匀泵浦 σ8<0 时的孤子解
本节讨论非均匀泵浦σ8<0 的情况,选取β=0.1.从平衡增益耗散的角度,饱和增益项σ3n′=.当σ8<0 时饱和增益项的分子会出现凹陷,此时适宜激发暗孤子.图2(a)给出了偶极暗孤子(蓝实线)以及三极暗孤子(红虚线)的功率随非均匀泵浦强度σ8的变化曲线,图2(b)中计算了这些暗孤子的稳定性,图2(c)分析了增益耗散强度I=随σ8的变化曲线.可以发现此时系统的增益耗散达到有效平衡.当取图2(a)—(c)中点d—g 对应的参数时,图2(d1)—(g1)给出了暗孤子的轮廓|ψ|(红实线)与相位ϕ(蓝色点虚线)的图像.当W=0.1 时得到偶极暗孤子,从图2(d1)和图2(e1)中的轮廓图可知,两个偶极暗孤子的相位均发生两次跃迁,跃迁位置对应于偶极暗孤子的两个谷,且ξ→±∞时,相位值相等,即相位差ϕ(-∞)-ϕ(+∞)=0 .当|σ8|较小时,从图2(d1)可以看到,偶极暗孤子的两个谷几乎是对称的,称为PT对称孤子[57];而随着|σ8|的增大,暗孤子轮廓不再对称,如图2(e1)所示,这种孤子称为PT对称破缺孤子[57],即孤子的对称破缺,此时孤子的能量主要分布在增益区.当W=0.05时,图2(f1)和图2(g1)分别给出了功率更高的三极对称破缺暗孤子与三极对称暗孤子,此时相位发生三次跃迁,并且相位差为ϕ(-∞)-ϕ(+∞)=π.为证明线性稳定性分析结果的可靠性,取孤子解加10%的随机扰动作为初值进行演化.演化结果如图2(d2)—(g2)所示.图2(d2)给出图2(d1)中PT对称孤子的演化结果,可以看到它在ξ方向上呈现周期振荡,但却是稳定的束缚解.如图2(e2)所示,对称破缺孤子也可以稳定传播.图2(f2)给出不稳定三极对称破缺暗孤子的演化结果,可以看到随着演化时间推移,暗孤子右侧的一极向右侧偏移并发生耗散,余下的两极变为偶极暗孤子.图2(g2)给出稳定三极对称暗孤子的稳定演化结果.所有演化结果与图2(b)中的稳定性分析结果一致.
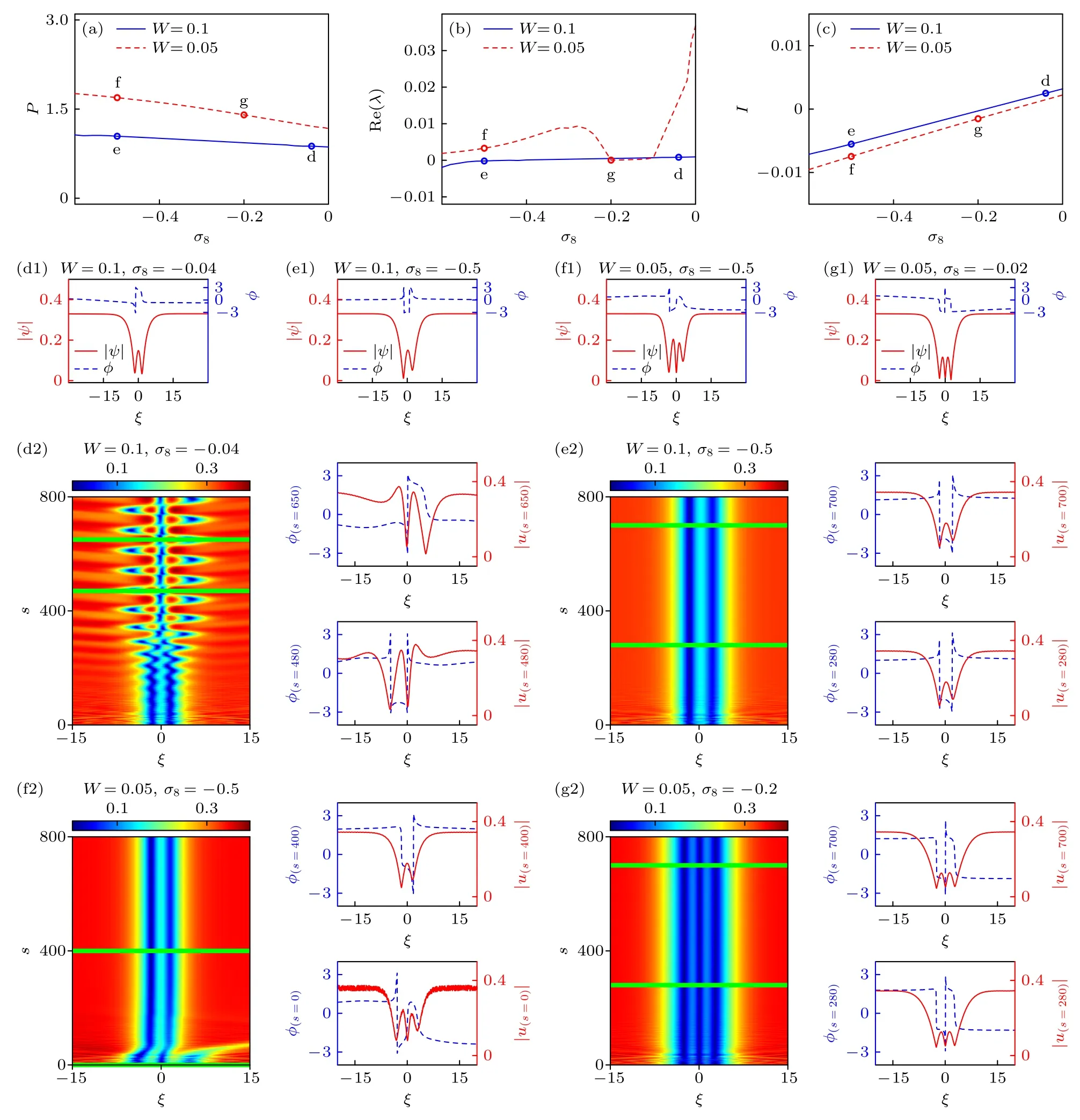
图2 非均匀泵浦强度 σ8<0 时的暗孤子解 (a)—(c)分别为暗孤子的功率、稳定性和增益耗散强度随 σ8 的变化曲线;(d1)—(g1)是取图(a)—(c)中字母d—g 相应的W 和 σ8 时孤子的轮廓 |ψ| (红实线) 以及相位ϕ (蓝色点虚线)的图像;(d2)—(g2)是孤子演化的结果,图中,左侧是演化结果的投影,右侧是特定时刻s 的演化结果Fig.2.Dark solitons for inhomogeneous pumping σ8<0 : (a)—(c) Power,stability and total gain loss intensity curves of the dark solitons as a function of σ8,respectively;(d1)—(g1) profiles of the dark solitons with different σ8 and W marked by the letter d—g in the panels (a)—(c) respectively,the red solid line (blue dashed-dotted line) denotes the profile |ψ| (phase ϕ);(d2)—(g2) projections and profiles of the evolution results.In the left panels,the projections of the evolution are shown.The profiles and phases of evolution at the special time s marked by the green line of the left panels are shown in the right panels.
由以上结果可以发现,偶极暗孤子的稳定区间更宽;调节PT对称外势的虚部W可以找到更多类型的暗孤子;调节非均匀泵浦强度σ8可以获得对称孤子与对称破缺孤子,而孤子的对称性(分为对称或对称破缺孤子)与稳定性无关.通过进一步的数值模拟发现,偶数极的暗孤子相位差为零,奇数极的暗孤子相位差为 π.
3.2 非均匀泵浦 σ8=0 时的孤子
本节考虑非均匀泵浦σ8=0 的情况,选取β=0.1.由前面的分析可知,这种情况下非线性增益与线性耗散无法平衡,激发和稳定孤子变得困难,此时得到的暗孤子和亮孤子不稳定[49].然而,现考虑模型中存在PT对称外势,形成了PT对称外势V与饱和增益项σ3n′之间的相互竞争,使得激发和稳定非线性模具有了可能性.
图3(a)和图3(b)给出了孤子的功率、稳定性随PT对称外势虚部W的变化曲线,图3(c)分析了增益耗散强度I随W的变化曲线.由图3(a)和图3(b)可知,W较小时孤子的功率与稳定性曲线变化较为平缓,当W增大到 0.54 时,孤子的功率曲线陡然上升,同时线性稳定性曲线 Re(λ) 突变到0.02,孤子变得不稳定.而从图3(c)可以发现,增益耗散强度I整体较小,但在W=0.54 处出现极值,结合稳定性分析结果,W=0.54 为孤子稳定性的相变点.当取图3(a)—(c)中点d—f 对应参数时,给出如图3(d1)—(f1)所示的孤子轮廓(红实线)与相位(蓝色点虚线)图.从图3(d1)可以看出,该孤子具有暗孤子的典型特征—相位跃迁,但轮廓却是两边凸起中间凹陷,这个显著特征使得非线性饱和增益与常数耗散平衡成为可能,该方案也为寻找极化子BEC 体系中的稳定暗孤子提供了一个新方向.随着W的增大,暗孤子中心逐渐升高,如图3(e1)所示,并且在左侧背景处出现了凹陷,这也为增益耗散平衡作了贡献.随着W的进一步增加,出现了图3(f1)所示的孤子,此时中心的谷突变成为峰,但相位跃迁特征仍然保留,是一种新型的暗孤子.从相位变化来看,三个暗孤子在中心位置都有一个 π 相位的跃迁,但ϕ(-∞)-ϕ(+∞)=0 .图3(d2)—(f2)给出了演化结果.从这些结果可知,孤子在W较小时能稳定传输;当W超过某一阈值(W= 0.54)时,孤子初始时刻的形状完全变形.这种情况下,孤子稳定性的相变点小于线性情况下的PT对称破缺点W=0.78,这是多种效应相互竞争导致的结果.
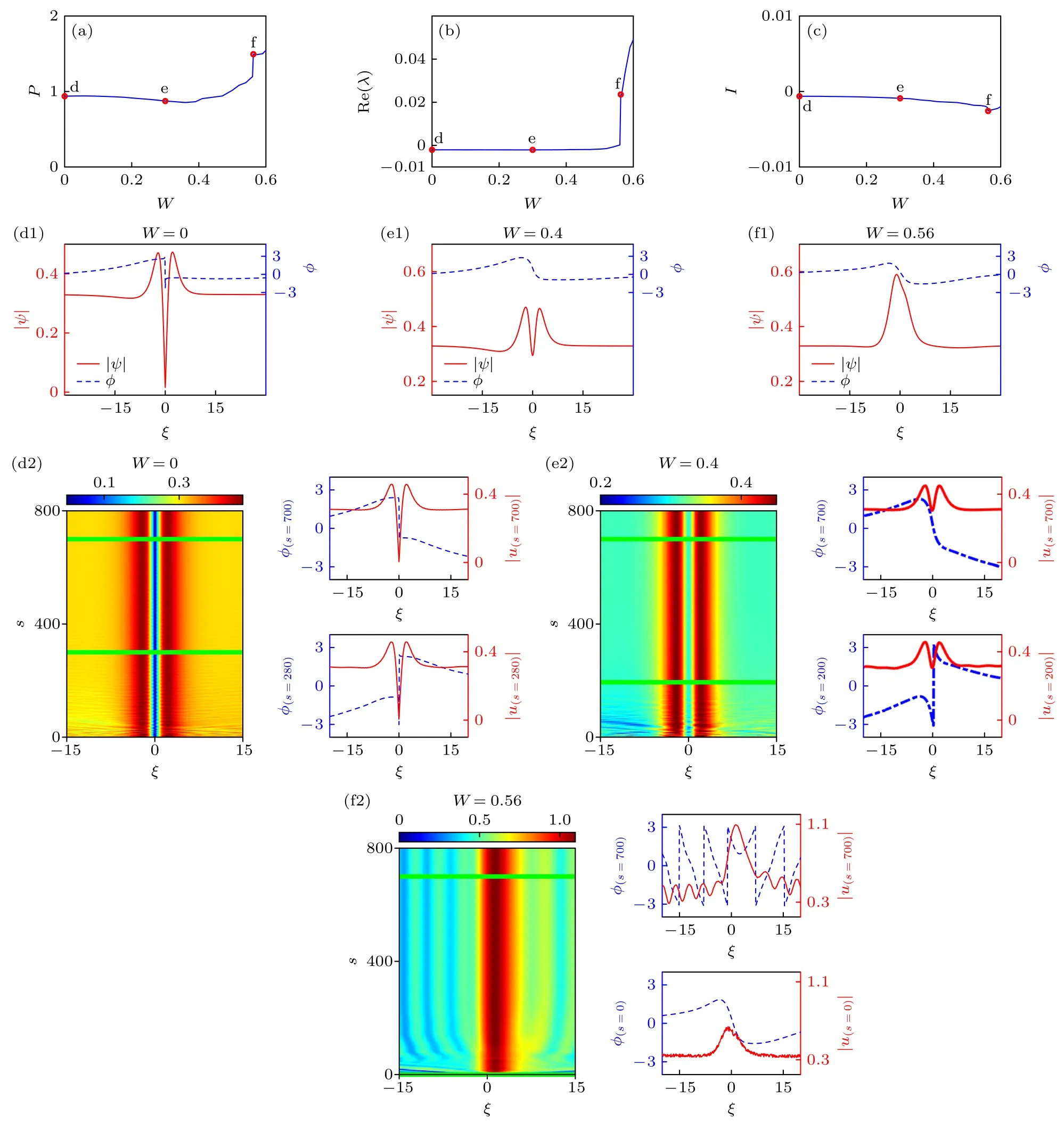
图3 均匀泵浦情况下的暗孤子 (a)—(c)分别为孤子的功率、稳定性和增益耗散强度随W 的变化曲线;(d1)—(f1)是取图(a)—(c)中字母d—f 相应的W 和 σ8 时孤子的轮廓 |ψ| (红实线) 和相位ϕ(蓝色点虚线) 的图像;(d2)—(f2)是孤子演化的结果,图中,左侧是演化结果的投影,右侧是特定时刻s 的演化结果Fig.3.Dark solitons for homogeneous pumping: (a)—(c) Power,stability and total gain loss intensity curves of the dark soliton as a function of W;(d1)—(f1) profiles of the dark soliton marked by the letter d—f in the panels (a)—(c) respectively,the red solid line(blue dashed-dotted line) denote the amplitude |ψ| (phase ϕ);(d2)—(f2) projections and profiles of the evolution results.In the left panels,the projections of the evolution are shown.The profiles and phases of evolution at the special time s marked by the green line of the left panels are shown in the right panels.
由以上结果可以发现,调制孤子自身轮廓可以用来平衡饱和增益项的增益耗散,它可作为寻找稳定暗孤子的另一种方案.此外,在非零均匀背景上暗孤子的轮廓丰富多样,可以是传统的凹陷,也可以是双峰,还可以是凸起.
3.3 非均匀泵浦 σ8>0 时的孤子解
本节讨论非均匀泵浦σ8>0 的情况.从平衡增益耗散的角度看,当σ8>0 时饱和增益项的分子会出现凸起,此时适宜激发亮孤子.在方程(6)中,σ1<0,若只存在自相互作用非线性效应,只能激发暗孤子.但该体系中既有自相互作用的Kerr非线性效应,还有凝聚体与热库间相互作用的饱和非线性效应,这两种非线性效应之间的竞争使得激发亮孤子成为可能.和其他典型的耗散系统类似,这里的化学势只能选一些孤立的值[58],如β=0.6 .为激发零背景的亮孤子,平衡饱和增益项和常数耗散项,需取σ3=0.2 以降低背景.
图4(a)—(c)分别给出了亮孤子的功率、稳定性和增益耗散强度随σ8的变化曲线.蓝实线(红虚线)表示W=0.1 (W=0.5)的结果.从图4(c)可知,亮孤子的增益耗散强度I比暗孤子大,但|I|的值都小于 0.05.结合图4(b)可以发现,|I|值小并不能保证孤子的稳定,但如果|I|值很大,孤子一定不稳定,这可以作为判断孤子稳定的必要条件.当取图4(a)—(c)中点d—g 对应参数时,在图4(d1)—(g1)中给出了亮孤子的轮廓.对比4 张图的参数可以发现,随着σ8的增加,为了平衡增益耗散,孤子的振幅增加,但随着W的增加,孤子的宽度变窄,并出现图4(a)所示的功率变小.图4(d2)—(g2)给出了演化结果.从图4(d2)和图4(e2)可知,功率较大的这组亮孤子可以稳定传输.在图4(f2)中,亮孤子在演化过程中虽然轮廓没有变形,但振幅明显降低,证明该孤子不稳定.而在图4(g2)中,亮孤子在演化过程中虽呈现周期振荡[59-61],但孤子形状、振幅均保持不变,证明此孤子稳定.

图4 非均匀泵浦 σ8>0 时的亮孤子 (a)—(c)分别为亮孤子的功率、稳定性和增益损耗强度随 σ8 的变化曲线;(d1)—(g1)是取图(a)—(c)中字母d—g 相应的W 和 σ8 时孤子的轮廓;(d2)—(g2) 是孤子演化的结果,图中,左侧是演化结果的投影,右侧是特定时刻s 的演化结果Fig.4.Bright solitons for inhomogeneous pumping σ8>0 : (a)—(c) Power,stability,and total gain loss intensity curves of the bright soliton as a function of σ8 ;(d1)—(g1) profiles of the bright solitons marked by the letter d—g in the panels (a)—(c) respectively;(d2)—(g2) projections and profiles of the evolution results.In the left panel,the projections of the evolution results are shown.The profiles of evolution at the special times s marked by the green line of the left panels are shown in the right panels.
由以上结果可以发现,在极化子BEC 系统中,只需调控σ8的正负即可实现暗孤子到亮孤子的相变,而改变σ8与W的大小可实现对孤子振幅和宽度的调控.
4 外势与非均匀泵浦对孤子的影响及其调控
为厘清PT对称外势与非均匀泵浦之间的竞争关系,本节将详细讨论外势与非均匀泵浦对孤子类型以及孤子稳定性的影响,仔细探究外势对孤子的调控.
4.1 外势与非均匀泵浦对孤子及其稳定性的影响
本小节讨论外势与非均匀泵浦对孤子的影响.第3 节中,通过改变非均匀泵浦强度σ8可获得多种类型暗孤子以及亮孤子.为了获得更丰富的结果,同时改变参数σ8与W,获得了多种类型的孤子,并研究了它们的稳定性.
图5(a)给出了各种类型孤子在参数W与σ8区域的分布图.当σ8>0 时,为激发零背景上的孤子并平衡增益耗散,选3.3 节所用参数.在σ8<0时,为激发均匀背景上的暗孤子,选3.1 节所用参数.图5(a)给出7 类孤子,第3 节给出了分布在区域III,IV 和σ8=0 的3 种孤子.通过线性稳定性分析结合数值演化,图5(b)界定了这7 种孤子的稳定区域,其中红线左侧为稳定区域.当取图5(a)和图5(b)中点c—h 对应参数时,在图5(c)—(h)中给出了孤子的演化结果.图5(c)所示为分布在区域I 中的稳定零背景偶极暗孤子的演化结果,从相位图中可以发现该孤子中存在两次相位跃迁.图5(d)给出了分布在区域II 中的稳定零背景(单极)暗孤子的演化结果,存在一次相位跃迁.图5(e)是分布在区域V 中的稳定对称破缺暗孤子的演化结果.可以看到,孤子的能量主要集中在右侧,与PT对称外势虚部的增益区一致,且存在一次相位跃迁.虽然此时非相干泵浦强度σ8不大,但是较大的W是孤子对称性发生破缺的主要原因,据我们所知,这类对称破缺暗孤子[3,5,54,56]还未被报道.图5(f)给出了分布在区域VI 中的稳定单极暗孤子的演化结果,这类暗孤子是最经典的暗孤子,也被称为黑孤子.图5(g)和图5(h)给出两类不稳定孤子的演化结果.可以发现,随着时间增长,暗孤子的轮廓变形明显,相位跃迁的特征消失.
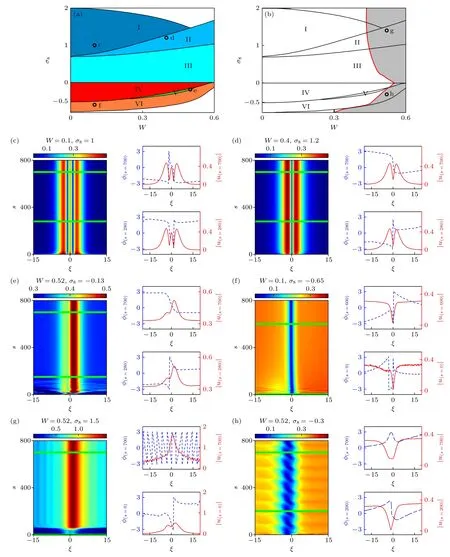
图5 孤子类型与孤子稳定区域分布图 (a) 7 种孤子在参数W 与 σ8 区域的分布图;(b) 稳定孤子在参数W 与 σ8 区域的分布图;(c)—(h) 图 (a),(b) 中字母c—h 相应的不同参数所对应孤子的演化结果,图中,左侧是演化结果的投影,右侧是特定时刻s 孤子轮廓和相位的演化结果Fig.5.Phase diagram for soliton types and stability: (a) Phase diagram of seven types of solitons as the functions of W and σ8 ;(b) phase diagram of stability regions for seven types of solitons;(c)—(h) projections and profiles of the evolution results of solitons marked by the letter c—h in the panels (a) and (b) respectively.In the left panels,the projections of the evolution are shown.The profiles and phases of evolution at the special time s marked by the green line of the left panels are shown in the right panels.
由以上结果可知,可以通过调节非均匀泵浦强度与外势虚部得到多种类型孤子,包括零背景亮、暗孤子,均匀背景的多极对称、对称破缺孤子,这些孤子的稳定性受外势虚部的影响较大.整体而言,外势虚部的增大不利于孤子的稳定性.
4.2 PT 对称外势对孤子的调控
求解过程中不仅找到了多种稳定的对称破缺孤子,而且还发现对称破缺孤子的空间分布完全依赖于PT对称外势虚部的空间分布,即孤子的分布依赖于外势的增益耗散区域的空间分布.如果实时调控PT对称外势的分布,势必会引起孤子空间分布的变化,从而达到操控孤子的目的,这为我们操控孤子提供了一种新思路.
对于稳定的对称破缺孤子,只需要对PT对称外势的虚部进行空间上的反转,即进行W=W·(-1)round(s/400)的操作(round 是一个取整函数),就可实现对孤子的控制.实验上对应于每 218 ns(相当于s=400)对PT对称外势进行一次对称翻转,即W变成-W.图6 给出了操控3 类对称破缺暗孤子的结果.图6(a)为取W=0.4,σ8=-0.5时暗孤子的演化图,可发现孤子轮廓随着外势变化迅速翻转,响应时间在ns 量级,同时相位跃迁的特征始终保持.图6(b)给出取W=0.52,σ8=-0.13时对称破缺孤子的演化.图6(c)给出取W=0.1,σ8=-0.5时对称破缺偶极暗孤子的演化.
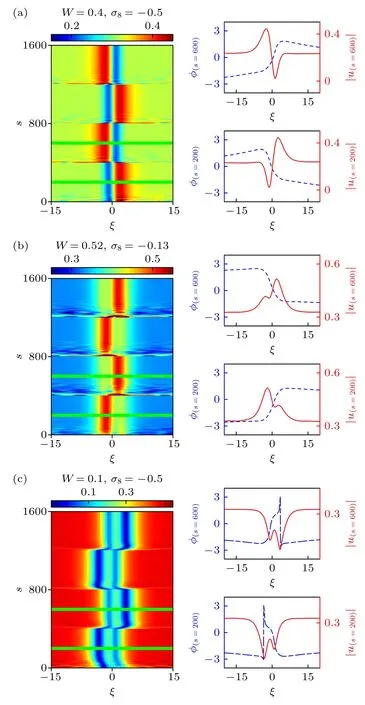
图6 调控外势虚部时对称破缺孤子的演化结果 (a)W=0.4,σ8=-0.5 时暗孤子的演化结果;(b)W=0.52,σ8=-0.13 时暗孤子的演化结果;(c)ξ0=3,W=0.1,σ8=-0.5时暗孤子的演化结果Fig.6.Evolution results of symmetry breaking solitons by controlling the imaginary part of PT potential: (a) The evolution results of dark soliton with W=0.4,σ8=-0.5 ;(b) the evolution results of dark soliton with W=0.52,σ8=-0.13;(c) the evolution results of dark soliton with ξ0=3,W=0.1,σ8=-0.5.
从以上结果可知,可以通过调制PT对称外势的虚部,达到操控对称破缺孤子的目的,进而实现极化子BEC 在全光开关等光信息处理方面的应用.
5 结论
本文通过引入由常数与高斯函数构成的复合泵浦和PT对称外势,设计了一维非相干泵浦激子极化凝聚体系统满足的PT对称模型.首先在弱非线性效应情况下,通过分析线性谱的特征,给出了体系的PT对称相变点.在正常非线性效应情况下,通过调节泵浦和PT对称外势虚部,找到了零背景的亮孤子、零背景的多极暗孤子、非零背景的多极对称暗孤子和对称破缺暗孤子、非零背景的凹陷和凸起等类型暗孤子,并利用线性稳定性分析和演化的方法讨论了它们的稳定性.通过分析孤子的轮廓与稳定性,进一步给出了不同类型孤子以非均匀泵浦强度和外势虚部作为参数的分布区域与稳定区域.最后,借助对称破缺孤子对PT对称外势虚部空间分布的依赖,通过调制PT对称外势的虚部,达到了操控对称破缺孤子的目的,为实现极化子BEC 在全光开关等光信息处理方面的应用奠定了基础.本文提出的结果将有助于理解非平衡凝聚体系统的物理性质,指导PT对称极化子BEC 体系中孤子的实验研究,挖掘极化子BEC在量子信息存储和处理方面的潜在应用价值.
猜你喜欢
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
电声技术(2020年7期)2020-12-16
电子制作(2019年19期)2019-11-23
时代英语·高一(2019年5期)2019-09-03
航天电子对抗(2019年4期)2019-06-02
电子制作(2018年19期)2018-11-14
大灰狼(2009年7期)2009-08-26
