
基于有限元法的舰船继电器振动冲击响应特性
2022-10-06 01:44张明远张春辉张晓友
沈阳工业大学学报 2022年5期
张明远, 杨 森, 张春辉, 张晓友
(1. 沈阳工业大学 机械工程学院, 沈阳 110870; 2. 海军研究院, 北京 100071)
继电器是船用电器中十分常见的电器元件之一,其触点通断状态的改变可实现对电力拖动设备、电力系统的自动控制和保护等功能,在舰船上起着十分重要的作用,继电器一旦不能正常工作,将直接影响舰船控制及安全性能,甚至造成控制系统失灵的严重后果,现如今对继电器的要求更加严格.
国内外对于继电器触簧系统耐力学可靠性研究相对较少.李哲等[1]对继电器进行模态分析和谐响应分析,得到了电磁继电器的耐力学特性;Chambega[2]分析了继电器内弹簧组的固有频率,得出当电磁继电器暴露在振动条件下时,释放电流增加的结论;闫明等[3]研究了簧片式触点开关在冲击载荷下的根部应变,并讨论了负波延迟对冲击响应的影响;强浩垚[4]给出了加速度响应谱能够模拟水下非接触爆炸冲击环境,并将其作为舰用设备的抗冲击设计与考核指标;曹艳玲等[5]通过仿真计算,所提抗振动模型比传统模型更能体现出抗振动性能,保证了最终所建模型的稳定性及准确性;王乾勋等[6]得出了最大加速度响应、伪速度响应、最大位移响应三者的冲击破坏潜能特性;冯麟涵等[7]发现增加预紧力可以改善簧片开关的抗冲击性能;Wattiaux等[8]介绍了一种检测电磁继电器在高强度机械冲击下的电气和机械性能的方法;陈依泽等[9]通过仿真得到了触头密度等参数变化对铁路信号继电器动静触头间接触力的影响情况;肖斌等[10]通过有限元法得到了继电器静态电磁吸力及磁场分布情况,并绘制了继电器的吸力特性曲线.
目前,国内外学者针对继电器的研究多集中于继电器继电保护、失效机理以及寿命预测等方面,而对于继电器的机械振动响应及冲击响应方面研究较少.舰船设备在河海上所承受的环境条件相比于在陆地要复杂恶劣得多,其中振动、冲击对继电器触簧系统的影响最为明显,振动、冲击往往会引起继电器的触点接触不良、误动作甚至损坏、失效,由此带来非常严重的后果.本文对继电器触簧系统的振动、冲击响应特性进行了研究.
1 触簧系统模型与计算过程
1.1 研究对象
继电器触簧系统主要由动簧片、动触点、静簧片、静触点及底部插座构成,其中动静簧片为悬臂结构,如图1所示.继电器各部分的材料特性如表1所示.

图1 触簧系统简化模型Fig.1 Simplified model of contact spring system

表1 材料属性Tab.1 Material properties
图2为继电器触簧系统的有限元模型.在底部插座处施加位移约束,在动簧片前端施加0.55 N预紧力,此时动静触点间接触力约为0.25 N,切向摩擦系数为0.2.

图2 触簧系统有限元模型Fig.2 Finite element model of contact spring system
1.2 施加预紧力
继电器工作时,由于动簧片前端施加预紧力的作用,使得动触点与静触点相接触,产生接触力,施加接触力后的动静触点接触应力如图3所示.
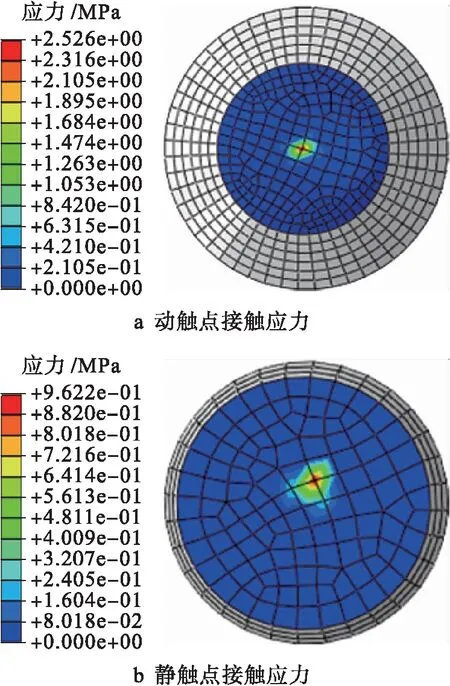
图3 动静触点表面接触应力Fig.3 Surface contact stress of static and dynamic contacts
在预紧力完全加载后,静簧片前端位移为1.87 mm,说明预应力使得动静触点在稳定闭合状态下最大行程为1.87 mm,如图4所示(单位:mm).

图4 稳定闭合状态的触簧系统Fig.4 Contact spring system in stably closed state
1.3 含预接触的模态分析
为了解触簧系统的一阶固有频率,在施加预紧力后,对其进行有预接触的模态分析.根据模态结果可知,其前三阶固有频率为65.5、394.5和408.8 Hz,模态振型如图5所示.

图5 触簧系统前三阶模态振型Fig.5 First three order modal shapes of contact spring system
2 振动特性分析
为模拟真实情况下振动试验台的振动,不可以对底座施加加速度激励信号,原因是会造成底座变加速运动,与实际振动台情况不符.应采取对底座施加某一固定频率的位移激励信号,施加信号方向为竖直方向.进行振动特性分析可以检测该结构在固定频率下,特别是在靠近共振频率下,继电器触簧系统的振动响应特性.
通过模态分析可知,触簧系统的一阶固有频率为65.5 Hz,对底座分别施加加速度为1g,频率为60、65.5、70 Hz的振动载荷,该信号下触点接触力曲线如图6~8所示.
通过图6~8可知,当振动载荷施加于触簧系统时,其触点间接触力曲线呈现明显的周期振荡型变化,出现拍振现象.当振动载荷频率与触簧系统固有频率相距较远时,振动载荷对触簧系统触点接触力影响较小,接触力变化不大.当振动载荷频率与触簧系统固有频率相接近时,产生共振现象,触点间接触力发生剧烈抖动,其拍振周期明显增大,易造成触点抖断,影响其正常工作.

图6 1g加速度下60 Hz振动载荷下接触力Fig.6 Contact force at 60 Hz vibration load and acceleration of 1g
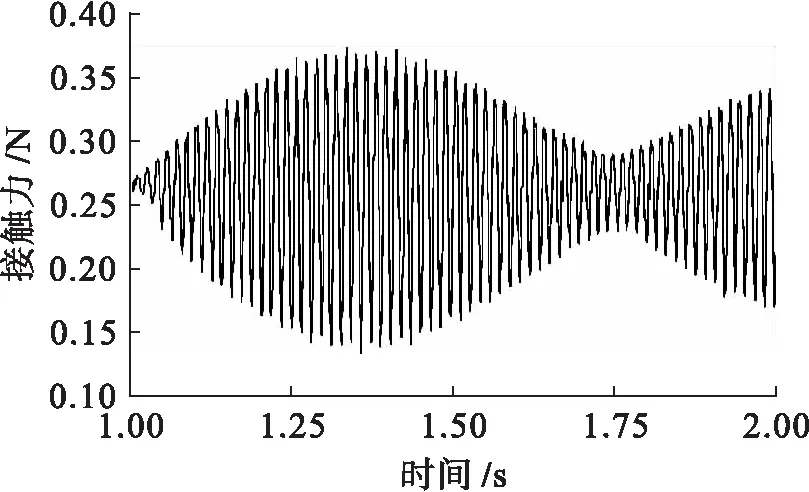
图7 1g加速度下65.5 Hz振动载荷下接触力Fig.7 Contact force at 65.5 Hz vibration load and acceleration of 1g

图8 1g加速度下70 Hz振动载荷下接触力Fig.8 Contact force at 70 Hz vibration load and acceleration of 1g
图9~10为1g加速度下65.5 Hz振动载荷下动簧片端部位移和根部应力.当振动载荷与触簧系统固有频率相接近时,动簧片端部位移与根部应力曲线形状相似,均表现为“金鱼型”曲线,因共振导致端部位移曲线与根部应力曲线产生了明显的拍振现象,变化十分剧烈,工作可靠性降低.此时端部位移最大达到6 mm,根部应力最大为150 MPa.
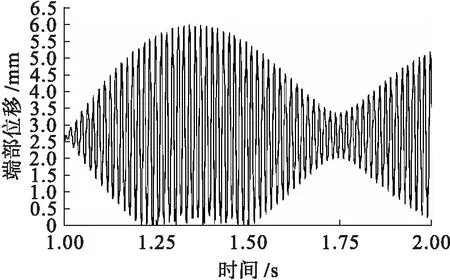
图9 1g加速度下65.5 Hz振动载荷下动簧片端部位移Fig.9 End displacement of moving spring under 65.5 Hz vibration load at acceleration of 1g
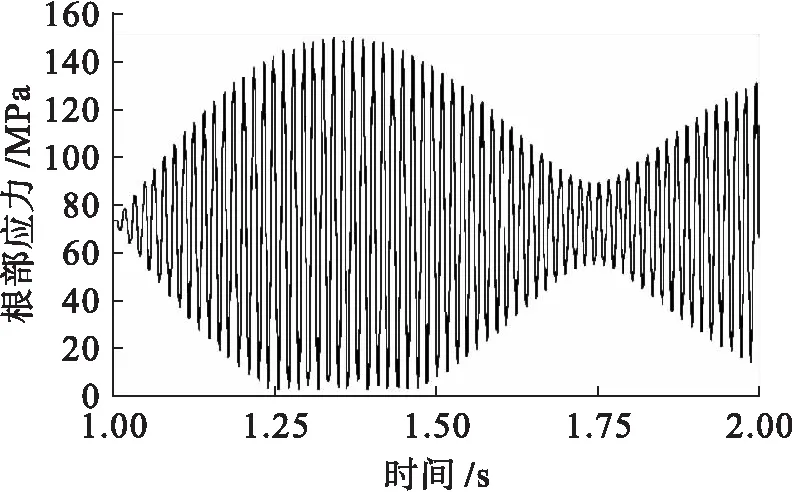
图10 1g加速度下65.5 Hz振动载荷下动簧片根部应力Fig.10 Stress at root of moving spring under 65.5 Hzvibration load and acceleration of 1g
3 冲击特性分析
国军标规定可用正、负三角形波来表示水下非接触爆炸冲击载荷,如图11所示.本文使用该冲击载荷进行计算.在冲击载荷作用下,动静触点间的接触力会发生大幅度变化,若接触力降低则说明触簧系统的可靠性降低,若接触力接近于零则说明动静触点将要分离,影响舰船电气设备正常工作.

图11 冲击载荷Fig.11 Shock loading
对底部插座施加10 ms正波脉宽和25 ms负波脉宽的冲击载荷,其正波幅值为30g、60g和90g.计算可得动静触点接触力变化曲线与动静簧片根部应力变化曲线,如图12~13所示.由图12~13可知,在冲击载荷作用下,动静触点发生了剧烈的抖动,簧片根部应力变化较为明显.随着冲击加速度幅值的增大,其波动的幅值增大.在随后的响应阶段逐步呈现周期性,且振动的频率大致接近其一阶固有频率,不随冲击幅值的变化而改变.
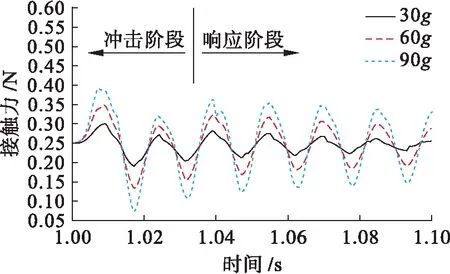
图12 接触力变化曲线ⅠFig.12 Contact force variation curves Ⅰ

图13 簧片根部应力变化曲线ⅠFig.13 Stress change curvesⅠof spring root
选取正波幅值为30g的情况,可得到其动静触点的滑移量,即Y方向二者的位移量,如图14所示.从图14中可以看出,因在预紧力的作用下,动静触点产生切向滑移,初始状态下Y方向位移量差为0.14 mm,而在冲击阶段动触点Y方向位移量陡然上升,随后呈现周期性衰减,表明在冲击阶段切向滑移量较大,易出现触点分离导致设备故障.
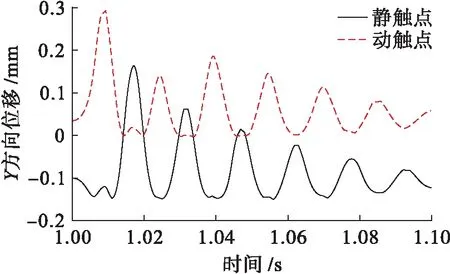
图14 动静触点Y方向位移量ⅠFig.14 Y-direction displacementⅠof static and dynamic contacts
对底部插座施加5 ms正波脉宽和20 ms负波脉宽的冲击载荷,其正波幅值为60g、90g和132g.计算可得动静触点接触力变化曲线与动静簧片根部应力变化曲线,如图15~16所示.由图15~16可知,由冲击引发的接触力剧烈抖动,接触力最低时为0 N,极易造成触点失效现象,故可将132g视为该工况下的临界冲击载荷.簧片根部应力变化曲线与前一种冲击载荷下变化接近,但幅值不同.
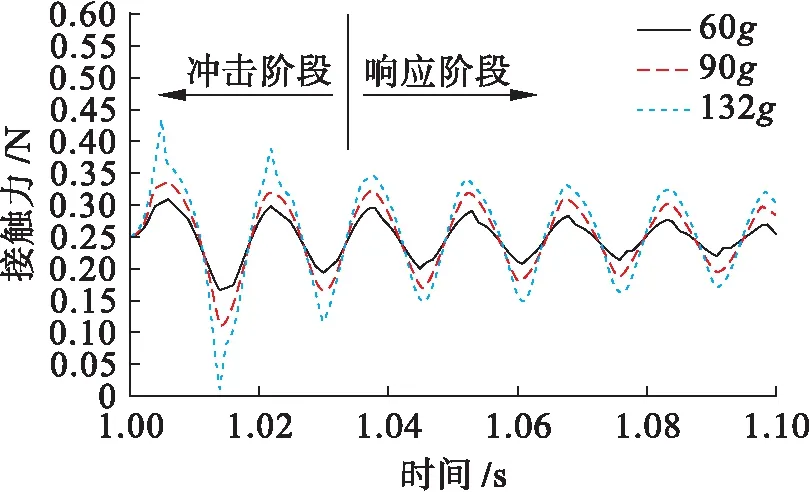
图15 接触力变化曲线ⅡFig.15 Contact force change curves Ⅱ
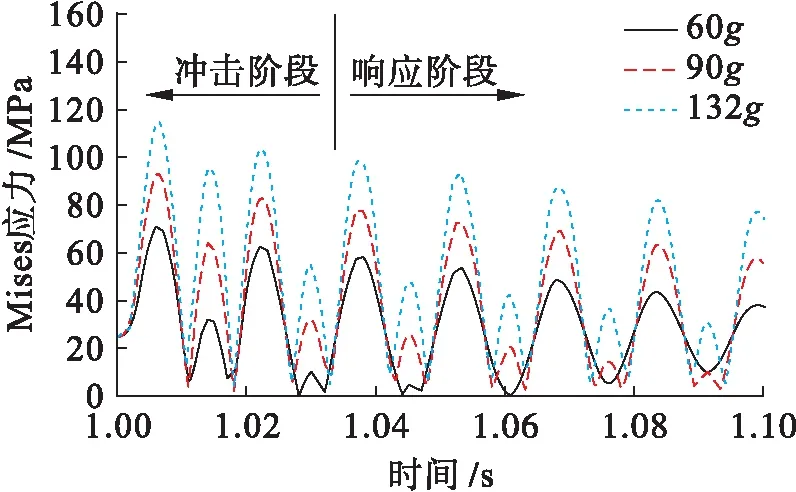
图16 簧片根部应力变化曲线ⅡFig.16 Stress change curves Ⅱ of spring root
按照上述方法,选取正波幅值为132g的情况,可得到该正波幅值下其动静触点的滑移量,即Y方向二者的位移量,如图17所示.
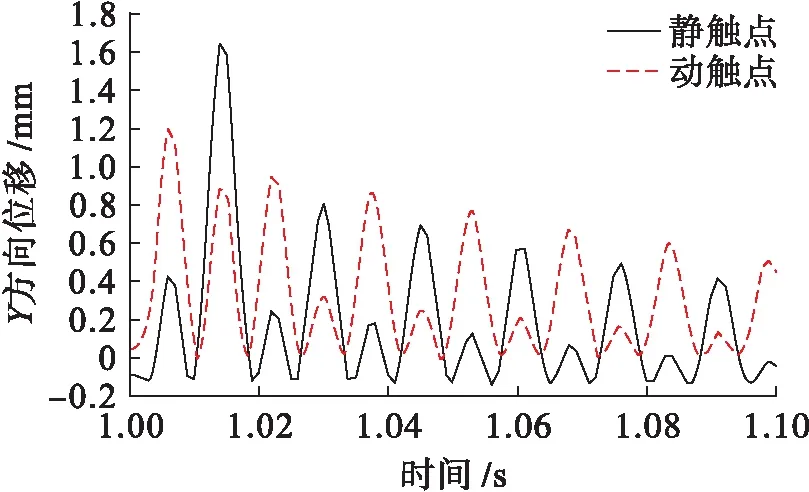
图17 动静触点Y方向位移量ⅡFig.17 Y-direction displacement Ⅱ of static and dynamic contacts
分别选取静触点面积为15、17和19 mm2的触簧系统模型,根据上述方法对其加载两种不同正波脉宽和负波脉宽的冲击载荷,不断调试正波幅值大小,当触点接触力为零时,认定其为当前工况下的临界冲击载荷,计算结果如表2所示.
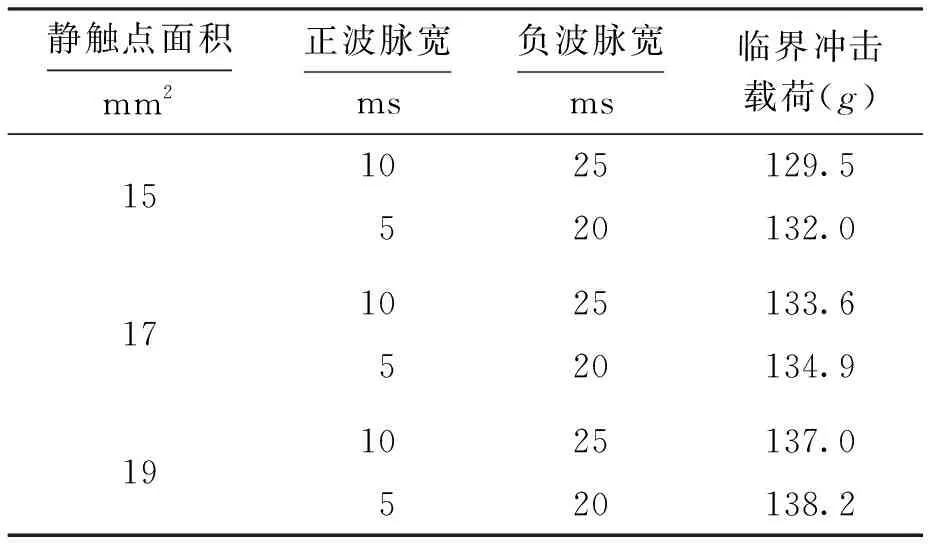
表2 不同脉宽时间下的临界冲击载荷Tab.2 Critical shock load under different pulse duration
由表2可以看出,当正波脉宽与负波脉宽变化时,其临界冲击载荷也会随之变化;当静触点面积逐渐增大时,其临界冲击载荷也会逐步增大.由以上计算结果可知,说明继电器触簧系统的静触点面积越大,其抗正负双波冲击载荷的性能越好.
4 结 论
本文通过分析得出以下结论:
1) 在振动载荷作用下,触簧系统的动静触点抖动剧烈,会产生明显的拍振现象,当载荷频率接近触簧系统固有频率时,拍振周期显著提高,呈现“金鱼型”曲线,易造成触点抖断,影响工作稳定性.舰船继电器工作环境应尽可能远离触簧系统的固有频率,以减弱拍振造成的负面影响.
2) 随着冲击载荷的幅值增加,动静簧片根部应力变化曲线的幅值变大,说明冲击载荷的增大,会加重动静簧片根部的变形,导致继电器触簧系统失效的几率增高.
3) 因初始预紧力的作用,动静触点产生切向滑移,施加冲击载荷后,切向滑移量陡然上升,随后呈现周期性衰减,说明冲击载荷会引起动静触点滑移而导致触点分离,使继电器触簧系统发生故障.
4) 增大静触点面积可有效提高触簧系统抗冲击性能,改善工作稳定性.
猜你喜欢
科普童话·神秘大侦探(2022年1期)2022-05-31
计算机测量与控制(2021年4期)2021-05-07
汽车维护与修理(2021年2期)2021-02-03
小资CHIC!ELEGANCE(2021年45期)2021-01-11
军民两用技术与产品(2020年8期)2020-09-07
汽车电器(2020年4期)2020-04-23
大众汽车(2019年6期)2019-12-11
小资CHIC!ELEGANCE(2019年27期)2019-08-28
山东工业技术(2019年13期)2019-05-30
居业(2018年5期)2018-10-24
