
车载跟踪设备伺服稳定设计
2022-10-09 08:37吴德军
机电工程技术 2022年9期
吴德军,夏 爽
(扬州船用电子仪器研究所,江苏扬州 225001)
0 引言
跟踪设备用于实时指示目标空间位置,为火力打击提供精确坐标[1-2]。某车载打击系统主要由载车、炮塔和跟踪设备组成,三者自下而上相互叠加,其中炮塔在载车上能够进行方位运动,跟踪设备天线在炮塔上能够进行方位和俯仰运动。载车在行进中会伴随横向纵向摇摆和转向运动,火炮在使用中会伴随炮塔转动,这些都会对跟踪设备造成干扰,导致跟踪误差增大甚至目标丢失。为了能够在行进中完成对目标的持续跟踪和火力打击,就需设计一种跟踪设备伺服系统,使其能够隔绝载车行进中姿态变化和炮塔调转带来的影响,使跟踪瞄准线在惯性空间上保持稳定。
常用的惯性空间稳定方法一般有两种:一种是搭建一个惯性稳定平台[3-4],将跟踪设备置于稳定平台上,使其在惯性空间上与载车解耦,这种方法将克服扰动问题完全交由稳定平台解决,早期使用较多,此方案成本高、结构复杂且系统可靠性低,很难满足车载平台安装空间要求;另一种是通过对车和炮姿态角度和速度的检测[5-6],结合不同坐标系推导计算,控制跟踪设备伺服系统的方位和俯仰轴运动,最终使跟踪瞄准线在惯性空间上保持稳定,这种方法充分利用原有跟踪设备的方位俯仰伺服机构[7],结构简单成本低,且伺服系统响应能力也相对较高,但是需要解决伺服稳定设计的问题,综合考虑采用此种方法。
1 伺服稳定分析
1.1 载车坐标系定义
要实现稳定跟踪,准确的车体姿态数据必不可少,所有的稳定跟踪都是建立在可靠的测量数据之上。在设计中采用光学惯性导航设备对姿态进行测量,可以连续输出车辆的航行角、俯仰角和侧倾角。
天线和炮塔组合体安装在载车上,而惯性导航设备敏感的是大地坐标系下的数据,所以在稳定分析中首先应当对姿态数据进行大地坐标系(n系)和载车坐标系(c 系)解算。两坐标系转换示意图如图1 所示。如图所示,大地坐标系由OXnYnZn表示,原点位于车体摇摆中心O,其中OXn指向正东位置,OYn指向正北,OZn垂直于大地向上[8-9]。载车坐标系由OXcYcZc表示,其中OYc表示车首方向,也是车辆正向行驶方向,OXc垂直于车首方向且指向其右侧,OZc指向车辆上方,和其他两个方向垂直。
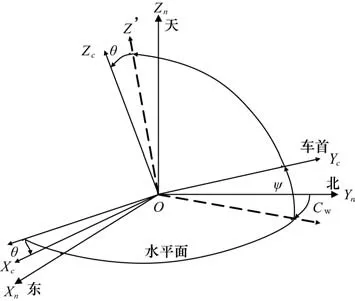
图1 大地坐标系和载体坐标系
根据欧拉定理,刚体绕固定点转动可以是绕该点的若干次转动的合成,载体坐标系就是由大地坐标系经过3 次转动得到,转动顺序依次是围绕Z 轴-X 轴-Y 轴。使用航行角、俯仰角和侧倾角来表示转动的角度:Cw 为航行角,正北方向和车首OYc到水平面的投影的夹角,顺时针方向为正;ψ 为俯仰角,车首OYc和水平面之间的夹角,向上为正;θ 为侧倾角,车体围绕车首OYc旋转的角度,右侧向下为正。
影响跟踪设备瞄准线稳定的因素除了载车姿态变化还有炮塔调转带来的影响。炮塔调转角度由和炮塔方位轴同轴安装的自整角机获取,使用Gw 表示调转角度,规定从上向下方向,顺时针方向为正。
1.2 目标角度计算
要实现目标跟踪,首先要计算载车坐标系和炮塔坐标系下目标坐标。根据以上分析,载车坐标系就是由大地坐标系经过航行角、俯仰角和侧倾角三次转动得到,所以求取坐标变换矩阵,使两坐标系满足以下关系[10]:

根据3次旋转关系得到3种变换矩阵,将矩阵相乘即得到载车坐标系和大地坐标系变换矩阵:

在大地极坐标系下目标通常以方位角A、俯仰角E、斜距D的方式给出,通过三角函数计算可以得到目标在直角坐标系下坐标:

而在载车坐标系下目标方位角Ac和俯仰角Ec可以用载车直角坐标系表示为:

假设炮塔调转角度Gw,结合式(1)~(4),计算得到炮塔坐标系下目标的方位角AG和俯仰角EG为:
1.3 目标角速度计算
前馈控制是一种重要的伺服控制方法,原理是在伺服控制系统速度环中添加一定的速度补偿量,可以有效地改善伺服系统动态跟踪性能[11-12]。对于跟踪设备,要减少车体和炮塔运动带来的附加角速度影响,首先需要计算出外部扰动在方位轴和俯仰轴上的角速度分量,再通过在速度环添加合适的前馈量,抵消外部扰动带来的影响。
在角速度变换中,可以使用炮塔坐标系作为媒介,先将外界扰动速度转化为炮塔坐标系三轴角速度,航行角、俯仰角和侧倾角以及炮塔旋转角度在炮塔坐标系下角速度分量分别为:
对于炮塔坐标系,因为天线瞄准线高低角旋转轴与天线俯仰轴一致,故在炮塔水平面内对对瞄准线高低角速度进行分析,炮塔水平面角速度示意图如图2所示。
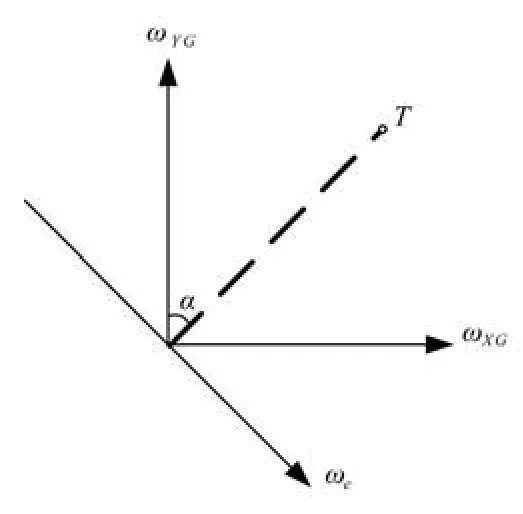
图2 炮塔水平面角速度示意
假设天线瞄准线角度向上为正,炮塔坐标系下只有XG、YG轴角速度对瞄准线俯仰轴有影响,设天线当前相对于炮塔方位旋转角度为α,那么车体和炮塔运动在天线俯仰轴的分量为:

已知瞄准线俯仰轴和天线自身俯仰轴一致,为了使瞄准线在俯仰方向保持惯性空间稳定,需要在伺服系统俯仰轴中添加补偿量ωec抵消ωe:

对于瞄准线方位角的分析,在OZG和目标T 共存面内进行,如图3所示。
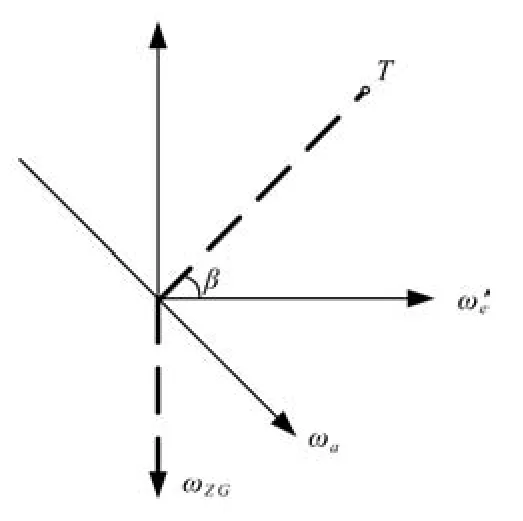
图3 俯仰面角速度示意
β为当前天线相对于炮塔俯仰角度,ωe′为XGYG在俯仰面的角速度分量的合成量,此分量和ωZG共同合成角速度ωa,可以表示为:

其中:

综合得到:

为了使瞄准线在方位方向保持惯性空间稳定,就需要在天线方位轴上增加一个补偿速度ωac,能够抵消ωa对天线影响,即:

计算得到ωac为:

2 伺服稳定系统设计
跟踪设备伺服控制系统采用电流、速度、位置三环串级控制,系统原理如图4所示。其中电流环由功率驱动器集成,测速机和旋转变压器分别采集电机转速和天线方位俯仰角度,构成速度环和位置环反馈。车体姿态数据(航行角、俯仰角和侧倾角)通过安装在载车上的惯性导航设备获得,炮塔转角由和炮塔共轴安装的自整角机获得。位置解算模块接收大地坐标系下的目标数据,经过计算输出炮塔坐标系下目标方位角和俯仰角,光纤陀螺用于敏感车体姿态和炮塔角度变化带来的天线角速度变化,用于伺服系统速度前馈。
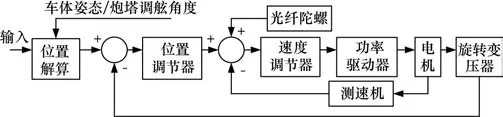
图4 伺服系统原理
通过以上分析计算得知,车体姿态变换和炮塔旋转在位置环的反馈角度为AG和EG,在实际中可以通过计算机实时解算获得。
天线方位俯仰轴的速度前馈量有两种方法可以获得:第一种方法是通过对惯性导航设备和炮自整角机输出的角度进行微分,再通过1.3节的提供的方法进行计算;第二种方法是通过光纤陀螺直接采集相关信号再计算获得。第一种方法容易引入计算误差且实时性不足,特别是对于车载设备这种速度角速度变化较大的使用场合,微分得出的角速度往往不准确,故采用第二种方法。
陀螺的安装位置不同,速度前馈信号的计算方法也不同,基于计算量最小和使用陀螺最少的原则,结合1.3 节对速度前馈的分析,本设计拟采用3个单轴陀螺完成前馈信号采集。陀螺1安装在天线方位插架上,指向方向和俯仰轴平行,这种安装方式可以直接敏感出外界扰动在俯仰轴上的角速度分量ωe(图2)。陀螺2安装在天线方位基座上,敏感炮塔坐标系Z轴角速度ωZG(图3),陀螺3 安装在方位插架的炮塔水平面上,敏感角速度ωe′(图3)。
已知跟踪设备的方位轴和俯仰轴是伺服系统控制的两个旋转轴,所以在这两个轴上叠加速度补偿量抵消车体姿态变换和炮塔旋转带来的速度影响。假设陀螺1、2、3 输出角速度分别为ωGyro1,ωGyro2和ωGyro3,根据式(8)和式(13),可以得到实际在方位轴和俯仰轴上补偿角速度ωac和ωec为:

此种安装方式由于将陀螺直接安装在需要敏感的轴上,无需复杂的计算和坐标变换就可以直接得到想要的角速度,这种前馈方法不仅计算量小,所带来的计算误差也大大减少,并且整个系统的实时性也得到提高。
3 仿真实验
为了验证上述伺服稳定控制方法,使用SIMULINK搭建了一个两轴的伺服控制系统,图5所示为仿真模型。
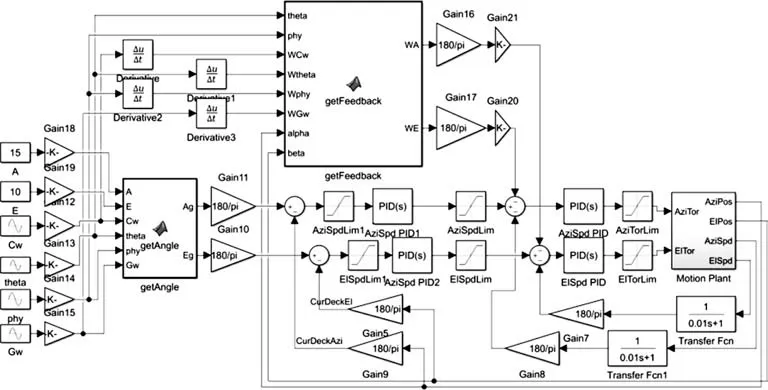
图5 两轴伺服控制系统仿真模型
控制系统的输入包括航行角、俯仰角、侧倾角和炮塔方位角以及在大地坐标系下的目标方位俯仰角度,根据1.2节和1.3节的分析,设计模块getAngle 位置解算单元,将大地坐标系下目标角度转化为炮塔坐标系下目标角,控制伺服系统完成位置闭环。模块getFeedback 是前馈量计算单元,用于计算外界扰动对天线方位俯仰轴角速度的影响,输出前馈控制量。结合实际情况,采用正弦信号作为仿真输入,仿真参数周期和幅值如表1所示。

表1 仿真设定参数
假设在大地坐标系下目标方位角15°、俯仰角10°,使用同一套控制参数,分别在不加速度前馈和添加前馈情况下进行仿真,得到天线在方位和俯仰方向跟踪误差曲线,如图6~7所示。
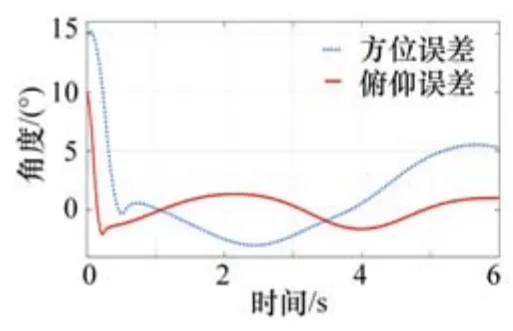
图6 无前馈下位置误差
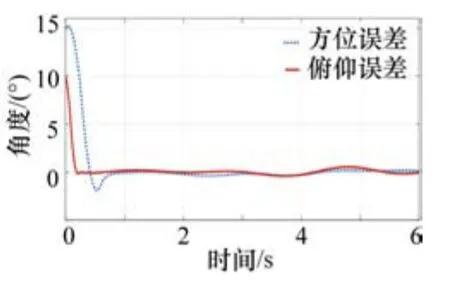
图7 有前馈下位置误差
仿真结果表明:(1)添加速度前馈的伺服系统具有更好的跟踪性能;(2)文中关于角度影响计算和速度影响分析结论准确可靠,伺服稳定系统能够很好地克服包括航行角、俯仰角、侧倾角和炮塔方位角变化带来的影响。
4 实验结果与分析
上述仿真测试方法验证了包括航行角、俯仰角、侧倾角和炮塔方位角在内的所有外界扰动对控制系统的影响,但是所用的角速度量是由微分的来的,速度前馈数据为理论计算的结果,并不能验证陀螺安装方式的正确性以及实际的控制效果。
为进一步验证上述控制方法的实际效果以及陀螺速度前馈的可行性,设计了摇摆台稳定控制实验。试验所使用的摇摆台是一个两自由度设备,能够按照正弦变化规律模拟侧倾角和俯仰角运动,试验中设定侧倾角幅值10°,周期8 s,俯仰角幅值20°,周期7 s。实测输出角度如图8所示。
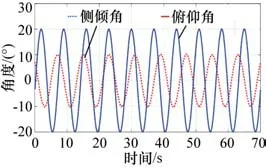
图8 摇摆台位置输出
参照仿真实验,在不加陀螺速度前馈情况下,天线方位轴和俯仰轴跟踪误差如图9所示。采用相同的控制参数,在添加陀螺速度前馈情况下,天线方位轴和俯仰轴跟踪误差如图10所示。
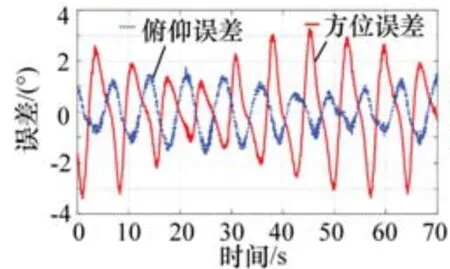
图9 无前馈下位置误差
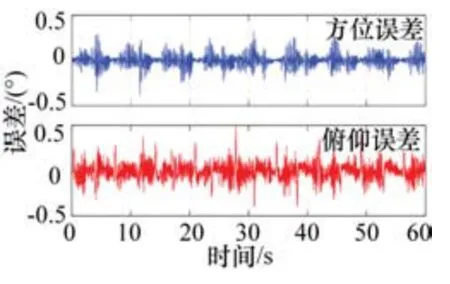
图10 有前馈下位置误差
对比图9和图10 的误差输出结果,可以明显地看出,基于陀螺速度前馈的伺服稳定系统具有良好的控制效果,陀螺安装位置正确。
5 结束语
车载跟踪设备容易受到载车和炮塔运动的影响,造成跟踪精度降低甚至目标丢失。为了使跟踪设备能够克服外界扰动保持连续稳定跟踪,本文提出了一种带速度前馈的双闭环控制系统,并完成扰动量在方位俯仰轴上的角度和角速度分量计算。为进一步提高控制精度,使用陀螺完成角速度采集,基于计算量最小和使用陀螺最少的原则,给出了一种陀螺安装方式。最后通过模型仿真和摇摆台实验,验证了新的控制方法对包括航行角、俯仰角、侧倾角和炮塔方位角在内的所有外界扰动都有很好的隔离作用,陀螺安装位置有效可靠,控制方法获得了满意的效果。
猜你喜欢
幼儿园(2021年12期)2021-11-06
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
考试与评价·高二版(2020年5期)2020-09-10
导航与控制(2019年2期)2019-06-12
智能计算机与应用(2018年5期)2018-10-20
中学课程辅导·教师通讯(2018年10期)2018-09-04
现代兵器(2017年9期)2017-09-28
中学生数理化·高一版(2017年3期)2017-07-08
现代兵器(2016年10期)2016-10-26
小学生时代·大嘴英语(2015年7期)2015-11-23
